康复医疗辅助手臂设计
2021-04-19郝金双姜文博王承禹李玲玲
郝金双, 姜文博, 王承禹, 李玲玲
(辽宁科技大学,辽宁 鞍山114051)
0 引言
现阶段随着我国生活水平不断的提高,人们作息时间的不规律和高油高盐食品的摄入量增加,患有心脑血管疾病的患者数量也在逐渐增加。我国脑卒中筛查调查研究的结果中显示,2007—2017年我国缺血性脑卒中发病率由2007年的119/10万,持续上升到2017年的156/10万,年均增长2.74%,明显高于1997—2007年的年均增长率(0.98%)[1]。在过去的临床实践中,缺血性脑卒中不仅危险,而且容易留下严重的后遗症,甚至出现偏瘫的情况。脑卒中偏瘫是由于运动系统失去对上中枢神经的控制,导致四肢对身体肌群的协调和控制功能紊乱同时,与此同时患者的肌张力也会紊乱,进而出现运动功能障碍,相关研究也表明运动疗法在改善肢体功能恢复方面有积极的作用[2]。缺血性脑卒中后遗症恢复运动的本质是学习与锻炼的结合,通过多次的学习和锻炼调动未损伤脑组织的重组和重建功能,需要患者心理上的理解接受并积极主动地参与康复。在病情的急性期间,缺血性脑卒中后遗症恢复运动主要是抑制原始的异常反射活动,重新建立正常的运动模式,同时对肌肉的力量加强训练。
而且现在工作压力非常的大,当家中有人需要此类照顾时,由于工作缘故很难抽出时间照顾,而患者由于病情原因,在没有人辅助的情况下很难自行加强肌肉训练,所以为了改善缺血性脑卒中后遗症患者的肢体活动能力,设计了一款康复医疗辅助手臂,可以更加简单便捷地进行肌肉力量训练。
1 研究目的及意义
针对脑血管疾病患者后遗症手臂不能自主运动的问题,并结合缺血性脑卒中康复运动实质,运用蜗轮、蜗杆、丝杠、仿生学结构等技术来实现帮助患者肢体康复的活动目标,同时使患者可以不用通过其他人或者器械的帮助,直接使用辅助手臂做手臂往复运动,来进行肌肉活动、肌肉张力缓解和肢体运动神经保护。并且解决患者手臂承载能力的问题,设计一个可以实现自动伸缩、自如切换运动方向、主体运动部分和承载部分分开的,符合康复运动实质需求并且方便实用的康复医疗辅助手臂。
这样一款辅助手臂可以顺应市场需求,为更多的缺血性脑卒中患者服务,让他们能够减轻缺血性脑卒中后遗症带来的困扰,同时可以减轻家中亲人的工作压力和生活负担,这也将是未来市场的一个发展方向。
2 辅助手臂的结构,功能方案研究
康复医疗辅助手臂设计的康复理念依附于Janef在20世纪80年代提出的运动再学习恢复方案[3],将缺血性脑卒中后遗症患者恢复锻炼的内容转移到平常的生活当中,利用大脑的功能可塑性,辅助手臂带动手臂被动运动,通过再学习重新获得新的运动能力。在传统Bobath康复疗法的基础上,增加了为期1个月的运动再学习计划后,缺血性脑卒中偏瘫患者的运动功能评分及患者的平衡能力也得到了明显的改善。运动再学习方案作为患者积极参与康复治疗的模式,患者依从性高,康复效果明显,值得广泛发展。康复医疗辅助手臂设计的结构分为主要工作部分和承载支架部分,主要工作部分负责带动上肢做被动运动对肢体进行肌肉收缩控制训练。承载支架的设计解决患者手臂因为承载能力差而不可单独佩戴的问题,同时考虑患者手臂因长时间不能自主运动导致的肱二头肌和肱三头肌处的肌张力过高,在辅助手臂带动下手臂做被动运动患者会感到疼痛,在辅助手臂主体工作的上半部相对手臂肱二头肌部分设计震动按摩器。
3 主要工作部分具体设计
图1中,上臂固定装置1采用弹性材料以便于手臂上臂的夹紧,同时宽度设计基本符合普通人上臂的宽度,以免过分夹紧导致血液循环不利,加重患者病情。内部材料选用相对柔软并可以直接接触皮肤的材料,这样炎热的夏天使用者可以穿着短袖或者直接袒露上臂使用。根据肱二头肌相应位置在上臂固定装置2的两侧设内凹的安装槽一,且安装槽一沿竖直方向开设,在此安装槽内安装上臂按摩装置3,在整体运行时通过震动按摩来缓解使用者的肌张力。所述上臂按摩装置3由电动机3-1、丝杠3-2、丝母3-3及震动按摩器3-4组成;所述电动机3-1设于安装槽一的一端,电动机轴与丝杠3-2的一端相连,丝杠3-2的另一端伸入安装槽一另一端开设的丝杠孔中;所述震动按摩器3-4一通过丝母3-3与丝杠相连3-2;在电动机3-1的驱动下带动丝杠3-2正转与反转,丝杠3-2与丝母3-3传动配合,带动震动按摩器一3-4在安装槽一内竖直移动,扩大按摩区域。同时震动按摩器一3-4可以调节振幅以控制按摩程度的大小,这样就可以达到按摩区域可调、按摩程度可调,以使患者上臂达到舒适状态进行恢复训练。

图1 主要工作部分
下臂固定装置2根据人体手臂下臂形状设计,靠近肘关节侧较宽、靠近腕关节侧较窄,适应人体手臂下臂形状,内外材料与上臂固定装置1相同,这样方便固定下臂并使使用者使用舒适。在下臂固定装置2靠近肱桡肌位置设内凹的安装槽二,安装下臂震动按摩器4,通过震动按摩以缓解肱桡肌的肌张力,可使手指达到相应的放松程度,由于肱桡肌体积小于肱二头肌,所以此震动按摩器无须移动,只调节震动幅度改变按摩效果即可。
所述上臂固定装置1在靠近下臂固定装置2一端的两侧分别设延长臂一,所述下臂固定装置2在靠近上臂固定装置1一端的两侧分别设延长臂二,并且延长臂一与延长臂二一一对应设置;其中一侧延长臂一与延长臂二的外侧设转动连接机构,内侧设连接板一9;另外一侧延长臂一与延长臂二的外侧设连接板二9;所述转动连接机构由连接电动机5、蜗杆6、蜗轮7及传动轴承8组成;所述连接电动机5设于其中一个延长臂一的外侧,连接电动机5的电动机轴与蜗杆的6一端相连;所述蜗轮7为带轴蜗轮,其上的短轴通过传动轴承8与对应的延长臂二相连,蜗轮7与蜗杆6传动连接;所述传动连接机构通过连接电动机5转动带动蜗杆6转动,蜗杆6和蜗轮7配合工作改变运动方向,通过传动轴承8使下臂固定装置2做往复运动,同时连接电动机5运动转速可调,以致下臂固定装置2运动速度可调。由于手臂在肌张力过高时,做快速或强制被动运动会导致疼痛或者肌肉拉伤,甚至断裂,所以下臂固定装置2运动速度的调整应该与上臂震动按摩器4按摩效果相关联,当震动按摩缓解肌张力以后,连接电动机5开始工作,辅助臂开始进行往复运动,当按摩效果和运动速度令使用者感到舒适时,主体工作部分持续工作相应时间后达到康复运动目的。
4 承载支架部分设计
工作部分固定装置10用于固定上臂固定装置1,选用弹性较好的材料方便夹紧固定。在装置下设计连接部分,连接部分设计为半球形以便工作部分固定装置10部分可以活动,能使使用者在使用时找到合适的姿势来进行恢复锻炼。
由于使用者身高不同和使用时坐立姿势不同,所以承载装置应该可以调节高度,所以支杆设计成两部分。上部支杆11下部中空、下部支杆12上部中空,上部支杆11安装在下部支杆12上作为承载支架的主体。上部支杆11与工作部分固定装置10连接,在下部支杆12底部安装底座15,底座15与地面成四脚接触,使承载支架更加稳定(可装滚轮方便移动)。
调节螺栓13安装位置固定在下部支杆12上,调节螺母14与调节螺栓13配合,上部支杆11与调节螺母14紧密配合,当旋转调节螺柱时由于螺柱不能移动,调节螺母14随着调节螺柱的转动而上下移动,以达到整个承载支架的高度调节。
承载支架调节螺栓13采用刚度相对比较大的材料,其他装置应选取弹性、韧性较好的材料,同时选取轻质材料,方便移动。
5 辅助手臂整体
为解决使用者手臂承载能力问题和恢复效果,主要工作部分应配合承载部分一起工作,同时该辅助手臂主体工作部分还配有蓝牙装置,可通过手机或遥控器来调控按摩器震动按摩幅度、运动速度等,以给使用者更好的使用体验。
康复医疗辅助手臂通过带动患者手臂做被动往复运动,从而达到运动再学习的目的,运动再学习后可促进脑组织中产生新功能连接的关键性刺激,并且可以增强和刺激大脑皮层的活动,提高神经系统的兴奋性,为肢体功能的恢复打下良好的基础。根据康复理论, 大脑具有一定的可塑性[4]。缺血性脑卒中后的大脑可通过改善中枢神经系统的可塑性,促进脑组织周围健康,侧脑细胞补偿可以加速侧支循环的建立,促进功能恢复。康复医疗辅助手臂的使用,利用运动再学习疗法进行多次运动和学习,利用大脑功能可塑性抑制原始的异常反射活动,重新建立正常运动模式,达到基本恢复效果。
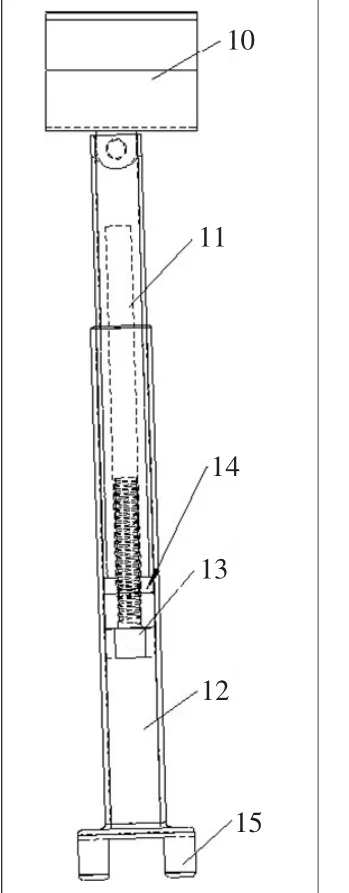
图2 承载支架10.工作部分固定装置 11.上部支杆12.下部支杆 13.调节螺栓 14.调节螺母 15.底座
6 结语
1)本康复手臂设计结构简单,使用方便、佩戴简单,可以单独佩戴减轻其他照看人员的工作压力。
2)上固定臂中的上臂按摩装置的按摩区域可小幅调整,按摩幅度及速度均可调节,可以对患者的上臂功能区进行充分的按摩,协助其功能恢复;下固定臂中的下臂按摩装置的按摩模式与上臂按摩装置相配合,实现对患者上肢的协调性按摩。
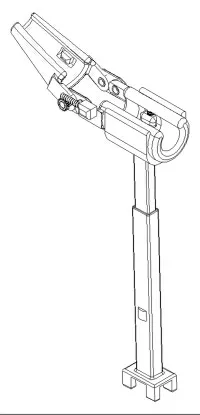
图3 康复医疗辅助手臂整体
3)同时配备了高度可调的升降支撑机构,保证使用者能够将上肢调整到适宜的放松姿态,以促进康复效果。
4)可通过外部智能终端(如手机或遥控器)调控2个震动按摩器的震动按摩幅度及速度等,使用更加方便。
综合脑卒中后遗症康复理念与目前社会发展形势,希望该康复手臂能为脑卒中后遗症患者带来福音。
