数据与拷贝矩阵相关统计匹配场波束形成
2021-04-19过宇艳宫先仪
过宇艳 宫先仪
(第七一五研究所 声纳技术重点实验室,杭州,310023)
匹配场波束形成是平面波波束形成的推广,广泛应用于水下被动定位、海洋地质参数反演、噪声约束等[1-3]。然而由于匹配场波束形成对声速剖面、水深、泥沙参数等引起的环境失配的敏感性,其应用受到严重限制[4-6]。实际的海洋环境是混沌、弥散、起伏的,具有不确实性。不确实性海洋环境即环境具有随机性而导致系统状态忽略或知识(信息)缺失的情况。常规匹配场波束形成中确定性的拷贝向量无法描述随机起伏的海洋环境,导致匹配场波束形成的定位效果不佳。常规匹配场波束形成属于牛顿力学的研究范畴,经典的牛顿力学可能无法完全描述海洋随机性,故要用统计力学的观点,加入概率和熵的概念。本文在统计力学的范畴下,用随机变化的拷贝互谱密度矩阵与数据互谱密度矩阵作比较(相关),得到SMFBF 模糊度表面。拷贝与数据的矩阵-矩阵相关较常规的向量相关增加了系统的自由度,能够获得更好的定位性能。
互谱密度矩阵理论和算法的研究十分广泛[7-9]。度量两个矩阵之间的相关性可以考虑为计算矩阵之间的距离,常见方法是欧氏距离[10],即在欧几里得空间内,两点之间直线的距离。由于互谱密度矩阵是埃尔米特(Hermitian)矩阵,并且是正半定的,在信号空间中形成一个黎曼流形[11],因此,常用的欧氏距离可能并不是最佳的度量方式,用黎曼距离更为恰当,黎曼距离越小说明矩阵之间的相关性越大。黎曼几何方法在统计力学中是十分有效的。统计模型是所有可能概率分布的子集,常常形成嵌入在所有可能概率分布集合中的有限维流形[12]。但真实分布可能并不在统计模型中,而是十分接近统计模型,所以需要知道统计模型在所有可能分布集合中的占比和形状,并形成两个概率分布之间的距离或差异度量,这就是统计力学中的几何方法。黎曼距离度量方法在信号分类中的应用较为广泛,Li等[13]采用功率谱密度矩阵作为特征来区分不同类型的脑电图信号,以确定人的睡眠状态。Mohamad等[14]对脑电图信号进行了相关熵谱密度矩阵的评估,并将这些矩阵之间的黎曼距离作为大脑中语音信号识别的衡量指标。黎曼距离应用到水声领域的研究还较少,Finette 等[15]应用黎曼距离实现声源被动定位。本文探讨用SMFBF 方法来提高随机海洋环境中垂直线阵的被动定位性能。
1 统计力学过程与随机海洋环境
统计力学用多个质点的平均运动或固体的平均振动来解释热动力学定律[16],给出熵的微观解释,形成为Boltzmann 和Gibbs 熵(BG 熵),用概率作描述。香农用通信数学理论(A Mathematical Theory of Communication,MTC)研究信息的定量性质。微观级的通信数学理论和宏观级的热动力学结合形成统计力学这一纲。
海洋声传播中十大水动力学方程[17]:由牛顿定律导出的三个动量方程,质量、盐度和热流守恒定律三个方程,热动力学第一和第二定律两个方程,一个状态方程以及一个内能或焓的方程;其中包含十个物理变量,分别是速度(u、v、w)、密度ρ、盐s、温度T、压力p、内能e、熵η 和热量q。熵是描述热流及其联系的无序性/扩展性,它与介质速度c 密切相关。声速的定义通过压力关于密度的等熵变化给出:
所以在混沌、弥散、起伏、随机海洋中,熵组织了声传播,故用统计力学研究系统是恰当的。同时,温、盐、熵等物理量的变化最终导致声速的随机变化,所以不确实性海洋环境可以理解为声速场具有不确实性的情况。不确实性在这里定义为:对声速场的描述缺乏完整的知识的一些定量度量[18],在传统的匹配场波束形成中,声速场被简化为等声速或正/负梯度剖面,是一种确定性的声速剖面。而实际的声速场是存在随机性的,故应在传统的确定性声速剖面上加入随机扰动以描述环境不确实性,表示为

2 两种算法
在水下声源定位问题中,最常用的方法是平面波波束形成和匹配场波束形成。从面向应用的角度看,平面波波束形成和匹配场波束形成有如图1 所示的发展。在自由场环境中,声速在深度、距离上都是均匀的,传统的波束形成方法能够确定声源的方位角;在声速仅随深度方向变化的常熵波导中,匹配场波束形成方法能够实现声源的距离和深度定位;而在不确实性海洋环境中,接收数据场和拷贝场都存在随机性,传统匹配场波束形成方法( Conventional Matched Field BeamForming ,CMFBF)中的拷贝向量无法描述声压场的随机性,也就无法描述海洋的随机变化性,故由CMFBF 发展到SMFBF。
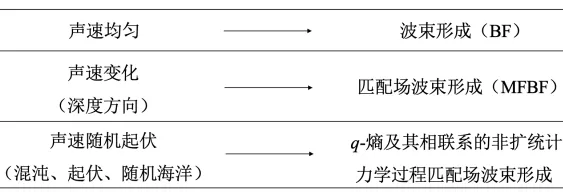
图1 波束形成发展
2.1 CMFBF
设源辐射频率为f 的窄带信号在频域为s (ωf),源的位置为 rs,接收线阵有N 个阵元,阵元位置为rm(m=1,2,..., M),则M 个阵元接收的声压场为:

式中, yl(ωf, rs,rm)为垂直线阵第l 个快拍接收到的声压场数据; g (ωf, rs,rm)为格林函数,由仿真软件根据环境文件计算得到; nl(ωf,rm)为第l 个快拍的加性噪声。
数据互谱密度矩阵由多个快拍的数据得到

式中,*为共轭转置运算符。类似地,拷贝的互谱密度矩阵可以由多个快拍的拷贝声压场得到


CMFBF 中,距离和深度的定位模糊平面P 为
2.2 SMFBF
对于SMFBF 方法,首先给出矩阵之间的欧氏距离和黎曼距离度量方法,然后类比到声源定位问题中,获得矩阵-矩阵相关的SMFBF 处理器。
M×M 维矩阵A 和B 可以视为M2复信号空间中的点,故A 和B 之间的欧氏距离为[19]

式中,T 为转置运算符。
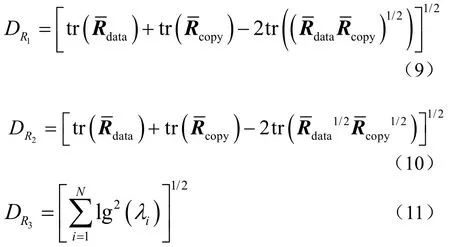
互谱密度矩阵R 是M×M 维Hermitian 正半定矩阵,因此在实线性向量空间H 中形成流形M ,则两矩阵的距离应在流形表面进行测量,流形上两点之间的距离为[20]



3 数值仿真结果
内波广泛存在于海洋中,会对声速场造成随机扰动从而对海洋声遥感和匹配场处理造成限制。此外,内波会引起声场的耦合,使声场结构在深度和距离上重新分布[21]。仿真实验利用孤立子内波存在位置的随机性来产生随机声速场。

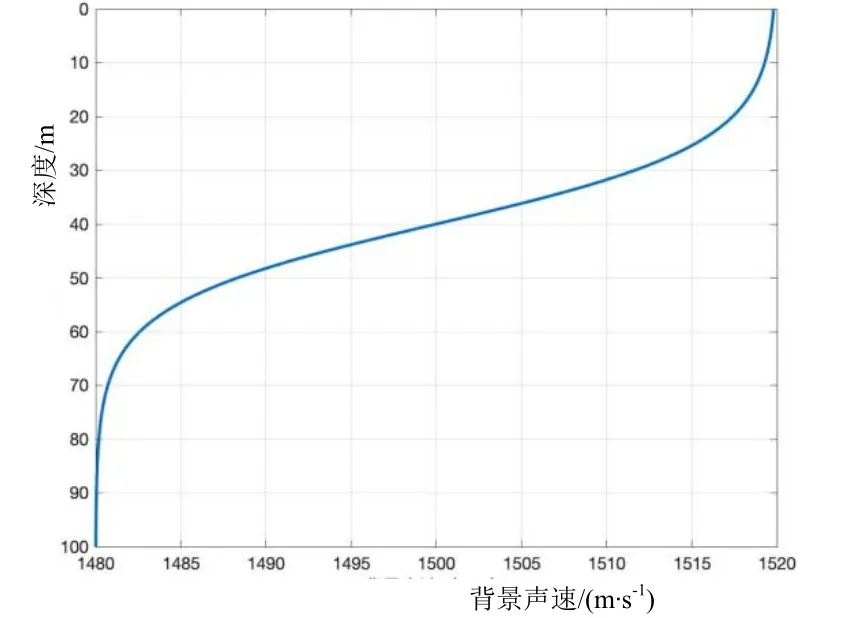
图2 背景声速场
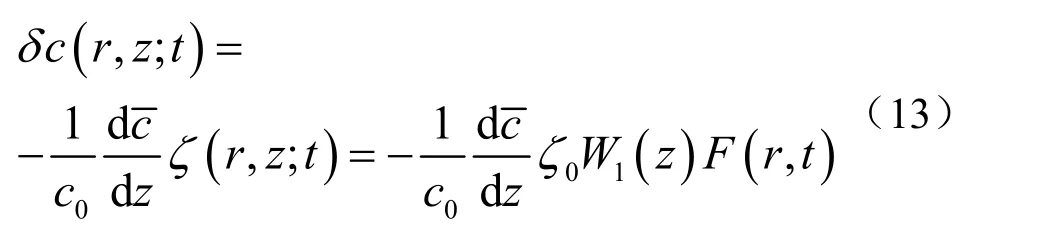
背景声速场在水下40 m 形成一个温跃层,声速随深度迅速下降。在温跃层内,线性和非线性内波的动力学最为活跃。声速扰动δc r,z;t( )建模为高斯孤立子内波[22]:
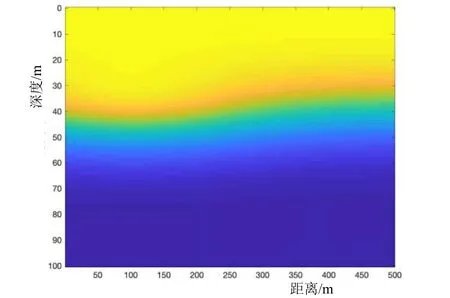
图3 内波在100 m 处的声速场
数据场和拷贝场的声速场均采用上述声速场,即声速在距离、深度、时间三维上存在随机扰动,随机扰动是由内波的随机位置导致的。声速场中的内波位置随机位于50~100 m 之间,故数据场和拷贝场两者声速场之间存在随机失配。探测深度为0~24 m,划分间隔为1 m,探测距离为0~500 m,划分间隔为0.5 m,声源在原点,声源深度20 m,发射100 Hz 的窄带信号;接收阵在350 m 处,阵元深度为0~100 m,每隔1 m 一个阵元。用RAM(Range-dependent Acoustic Model)模型进行仿真,声压场如图4 所示。

图4 声压场示意图
不确实海洋环境下CMFBF 三维图和x-y 平面示意图见图5。同样仿真条件下,SMFBF 方法采用式(6)的形式,三维图和x-y 平面示意图见图6。由图5~6 的对比可以看出,在声速场存在随机扰动、数据场和拷贝场存在随机失配的情况下,SMFBF方法相较于CMFBF 方法定位性能有明显提升,提高了源定位的分辨力并有效降低旁瓣。CMFBF 和SMFBF 距离和深度维剖面示意图见图7。
图5 CMFBF 算法结果
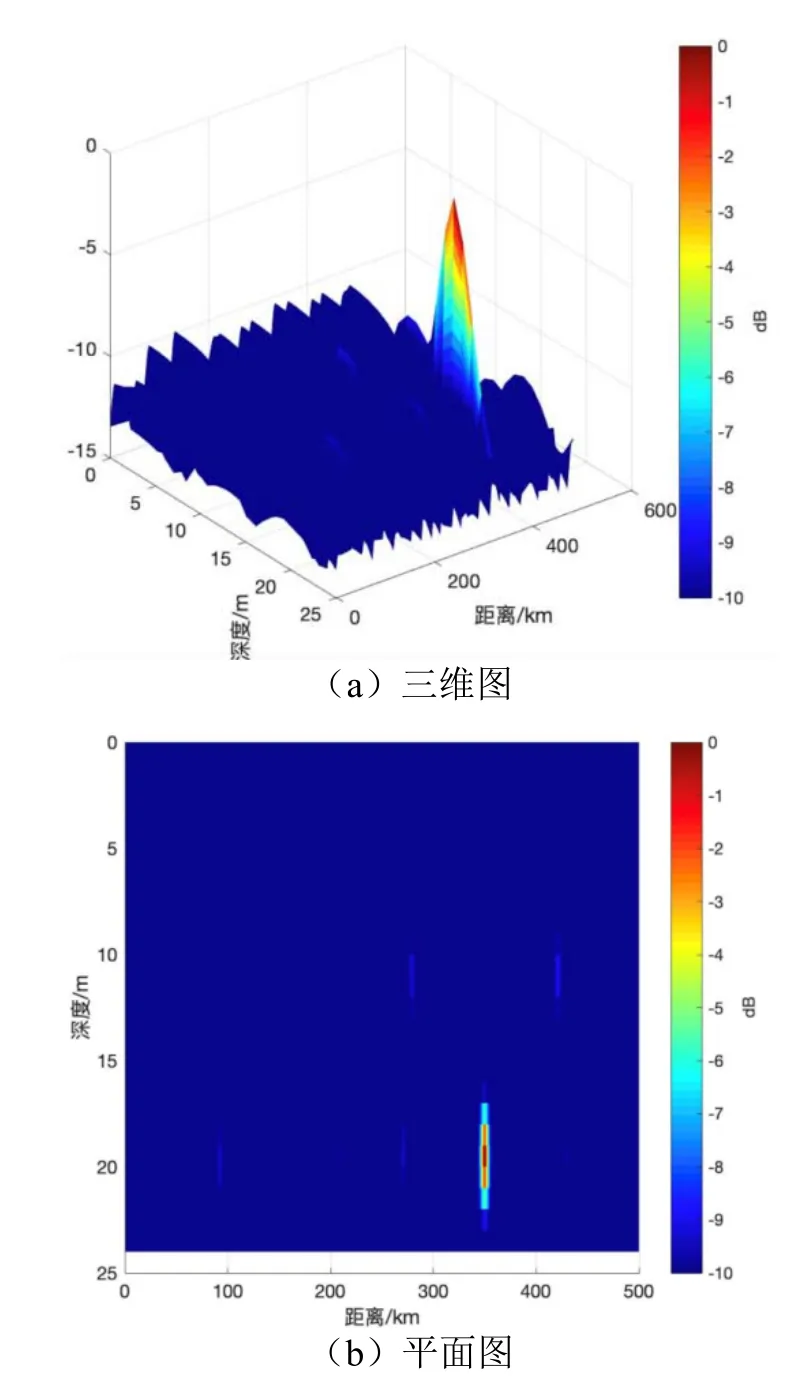
图6 SMFBF 算法结果
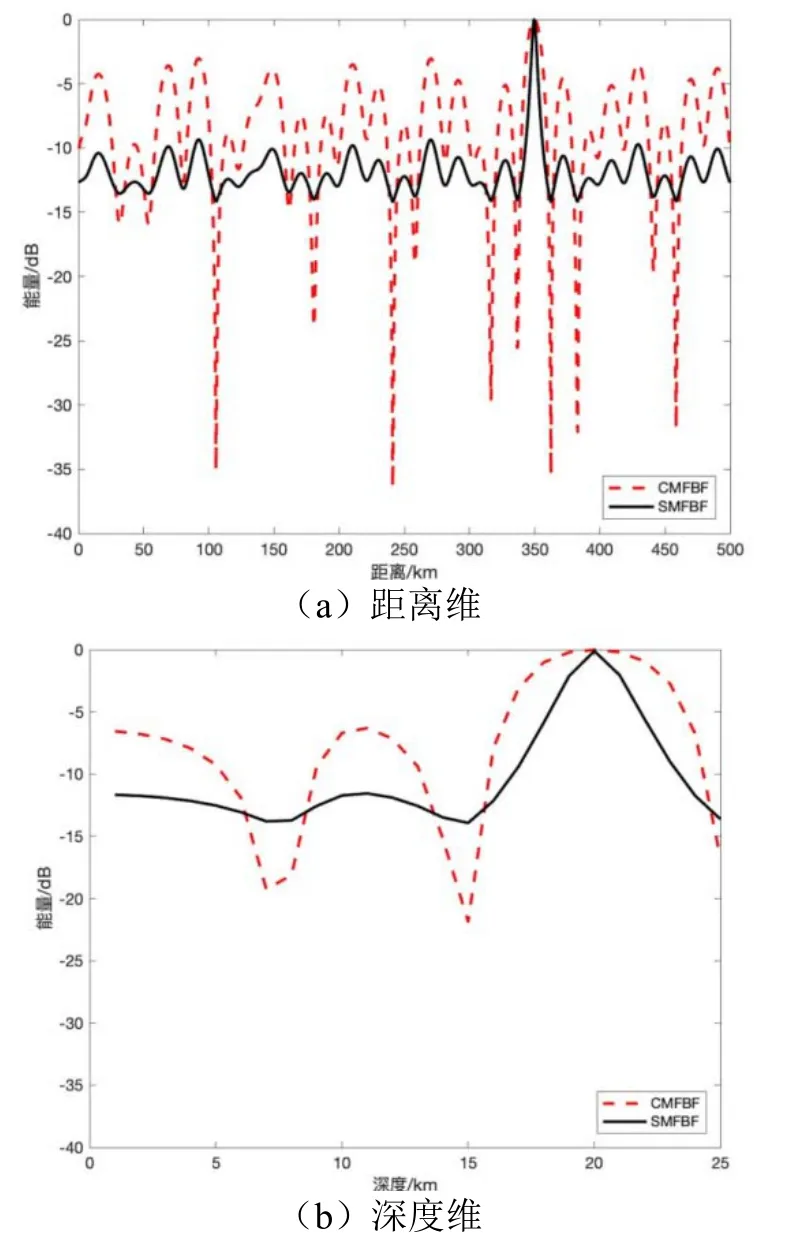
图7 CMFBF 和SMFBF 剖面对比
由图7 可以看出,在距离维和深度维,SMFBF的主瓣更窄,旁瓣更低。但在距离维可以发现SMFBF 方法的平均能量抬升较高,平均能量集中在-13 dB 左右。
4 结论
本文针对水下源被动定位问题,提出数据与拷贝矩阵相关的SMFBF 方法,由于互谱密度矩阵的性质,通过求解数据互谱密度矩阵和拷贝互谱密度矩阵之间黎曼距离的最小值获得声源位置的估计。
由于海洋环境的不确实性,阵列接收数据是一个随机场,那么与之匹配的拷贝也应是一个随机场,故SMFBF 方法中矩阵-矩阵对比包含了海洋环境可变性的额外自由度。相比于CMFBF 中确定性拷贝向量与随机数据场相关,SMFBF 中数据场和拷贝场均随机的情况自然能达到更好的匹配。
另外,本文的仿真条件虽然存在数据与拷贝声速场的随机失配,但失配条件不足以使常规方法产生定位错误,也就无法证明SMFBF 的宽容性。后续将研究其余可能的随机海洋建模方法和相应失配情况,探究在随机环境下SMFBF 是否具有更好的宽容性。
