基于自适应陷波器连续谱积分的超声清洗 发射换能器瞬态空化阈值与强度测量
2021-04-19吴博悦陈毅李建成
吴博悦 陈毅 李建成
(第七一五研究所,杭州,310023)
超声空化是由于液体介质受超声波的作用,在某些区域产生负压,从而产生气泡的现象。空化效应在超声清洗过程中起关键作用,由于空化泡可以进入工件与污物的缝隙之间,其膨胀与收缩能够将污物从物件表面剥离,克服了常规方法清洗的困难[1]。在空化泡溃灭的过程中会产生冲击波,它可以将污物乳化,或使污物脱落;同时,空化泡溃灭会诱发声化学发应,发生氧化而使污物氧化溶解。但空化效应也会引发空化腐蚀而损坏物件,如船舶螺旋桨与超声去污中的变幅杆的空化腐蚀[2]。因此对液体介质中瞬态空化阈值与强度的检测十分必要,这样既能高效清洗物件,也能保证清洗物件自身的安全。空化噪声连续谱可用于确定瞬态空化阈值,反应瞬态空化强度。因此,测量空化噪声连续谱是一个解决问题的有效手段。
1952 年,Esche 等人用空化开始时空化噪声的连续谱由平直转化为上凸作为瞬态空化的阈值[3]。2000 年,Frohly 等人研究了超声空化中空化噪声和空化强度的关系,在不同的超声功率下分别用空化噪声谐波及高次谐波的功率谱和连续谱来表示空化强度[4]。2004 年,梁召峰为研究超声清洗槽中的空化噪声谱,测量并计算得到了空化噪声连续谱,分析了稳态空化与瞬态空化的变化趋势[5]。2014 年,Andreas Hertz-Eichenrode 等人测量了空化噪声信号频谱的“颜色”,确定了各谐波频段的噪声级与声强对数之间的线性度;并且通过空化噪声的测量,测得瞬态空化阈值[6]。2019 年,IEC/TS 63001- 2019标准制定了空化强度测量标准,标准中采用了空化噪声级和提取空化噪声谱分量的方法,获得空化噪声各个部分的分量来表示空化强度[7]。
如何较好的提取出空化噪声连续谱成为问题的关键,本文提出了基于自适应陷波器连续谱积分的分析方法,利用常用的格型自适应陷波器去除空化噪声谱中与瞬态空化无关成分,对瞬态空化阈值与强度进行了试验测量。
1 瞬态空化的成因
瞬态空化与稳态空化是根据空化泡的存在时间(寿命长短)或空化泡的活动状况来区分的(图1)。稳态空化是指空化泡在液体介质中长时间(多个声周期)存在,空化泡随着液体介质中压力的变化脉动,并作膨胀与收缩的往复运动。瞬态空化是指空化泡在液体介质中存在时间很短,由于液体压力起伏过大而使空化泡溃灭,引发空化效应。单个而孤立的空化,通常是稳态空化;集群而以气泡云的形式出现的空化,通常是瞬态空化,这也是日常中最常见空化现象。
发生瞬态空化时,气泡壁在极短的时间内向内塌缩,速度超过声速,同时会在瞬间产生超高温,可达2000 K。当气泡壁的运动速度超过声速时,能量会在空间积压,形成冲击波。此外,由于气泡的高速脉动,会导致气泡附近液体的复杂流动,因而形成环流和湍流,称之为声微流。声微流因其包含环流,会使液体介质中的分子发生移动或者转动。
空化噪声是空化泡的形成与破灭、线性与非线性脉动、以及空化泡之间的相互作用等因素而产生的,始终伴随着空化过程。空化泡的大幅度脉动是高度非线性的,这使得它辐射的噪声谱变得非常复杂,包含了谐波、次谐波、超谐波等成分。空化泡破灭的过程比稳态脉动更为复杂,包含了复杂而多样的成分,且这些成分的来源不同,其中连续谱是大量空化泡的混沌运动所致,是瞬态空化的重要特征之一。
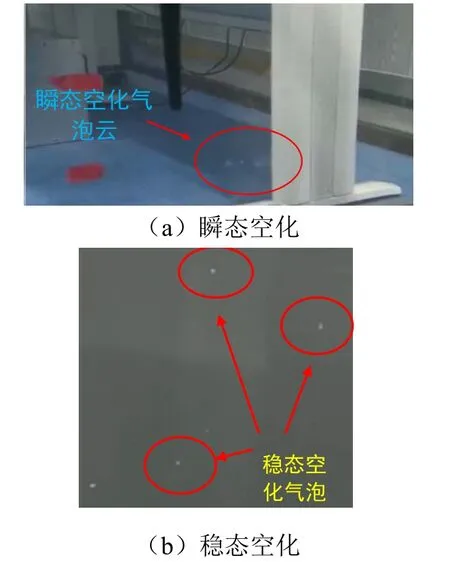
图1 稳态空化与瞬态空化
2 自适应陷波器理论及其设计
2.1 格型自适应陷波器
当带阻滤波器的阻带很窄时,称之为陷波滤波器。一个理想陷波器的频率响应是要在消除的信号频率点处其值等于0;其他频率处其值要等于1。即

自适应陷波器利用前一时刻获得的滤波器参数来自动调节当前时刻的滤波器参数,以适应未知变化的信号和噪声的统计特性,达到最优滤波的目的。理想自适应陷波器的频率特性只在陷波频率处等于1,而在其它频率处均为0。自适应陷波器可以根据陷波频率自动调整,跟随输入信号频率的变化而变化,从噪声中检测出正弦信号的频率,同时消除噪声干扰。
自适应格型陷波器是由 Cho 等人提出[8-9]的,将一个全极点格型滤波器和一个全零点格型滤波器级联而成。自适应格型陷波器的传递函数为
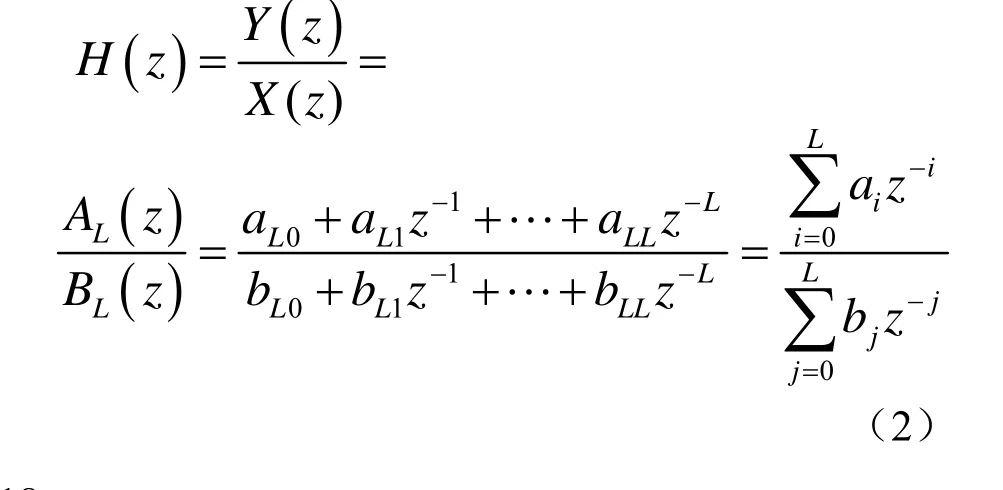
式中,X(z)为输入信号,Y(z)为输出信号,AL(z)和BL(z)为系统函数,L 为陷波器长度,bL0=1。设l=L,L-1,L-2,…,1,令
则
由式(5)可得
定义 v0=a00,则

由式(3)可得

所以

由式(2)、(9)可得

由此可得输入信号与输出信号的关系如式(10)所示。通过设置参数vl以及函数Cl(z)即可达到所需的滤波效果。格型自适应陷波器结构如图2 所示。

图2 自适应格型陷波器结构图(L=3)
2.2 自适应陷波器的设计
空化噪声连续谱的频带非常宽,也包含了基频及其谐波频率成分,但因其相对较小而被淹没。因此设计了格型自适应陷波器,用以去除与瞬态空化不相关的线谱成分,同时尽量留下连续谱在各线谱频点的部分。
由于基频以及各阶干扰较大的谐波频率是已知的,因此可以设置具有n 个待陷频率的矩阵A=[f1f2…fn]。设
式中,fi为第i 个陷波频率。其中,自适应陷波器的陷波频率包括超声清洗换能器激励的基频f0,谐波nf0(n=2,3,4),n/2 倍谐波nf0/2 (n=1,3,5,7),n/3 倍谐波nf0/3 (n=1,2,4,5,7,8,10,11),以及n/4 倍谐波nf0/4 (n=1,5,9,13)。
频率标识信号为:

式中,w1i与 w2i为陷波参数,w11=0.1,w21=0.1。
式中,1iX-为该陷波阶段陷波后的信号;u 为调节陷波参数。调节u 的大小,即可调节陷波的幅值。对于不同的陷波频率,可以设置不同的调节陷波参数,达到不同的陷波效果。
设原始信号为1X ,第i 次陷波后信号1iX+为
最终陷波结果为

图3 为在超声清洗槽内采集的某一时刻的空化噪声的幅度谱。用格型自适应陷波器处理该数据得到的幅度谱如图4 所示。本文图中统一用Lcn表示噪声级。

图3 陷波前幅度谱
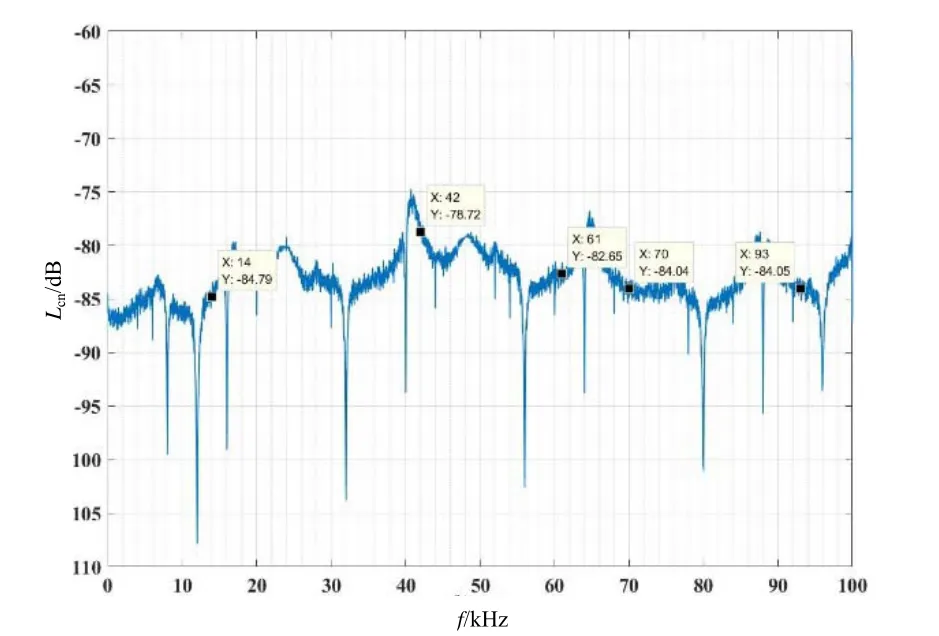
图4 格型自适应陷波器处理后幅度谱
格型自适应陷波器易通过控制参数来控制陷波的幅值。信号通过设计的格型自适应陷波器后,图3 幅度谱中基频及其谐波的线谱尽皆陷去,其中多数隐于连续谱中,如图4 所示。同时,各频率中抽取5 个非陷波频率,其幅度如图中数据游标所示,陷波前与陷波后的幅度差≥2 dB,说明设计的格型自适应陷波器性能良好。
2.3 空化噪声连续谱积分
空化噪声连续谱测量的数据处理流程见图5。将采集信号分段并通过自适应陷波器后,得到陷波处理后的信号。由帕斯瓦尔定理可知,信号的总能量既可以按照每单位时间内的能量在整个时间内的积分计算,也可以按照每单位频率内的能量在整个频率范围内的积分而得到。因此,空化噪声连续谱积分的计算公式为



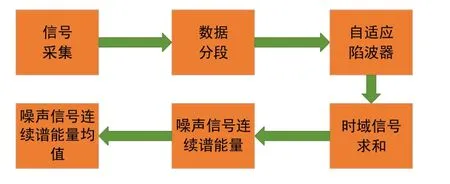
图5 数据处理流程
3 测量系统设计与构建
为了验证自适应陷波器,我们设计了试验验证系统如图6 所示。接收端由水听器、采集卡与示波器组成。水听器为RHS-5 水听器,灵敏度约为-218 dB(参考灵敏度为1 V/μPa)。采集卡为National In- struments 的PXI-6368。示波器为Keysight DSOX3- 014A 型。水槽上方有运动装置,可以控制电机带动水听器在水槽中运动,其运动速度可调节。
发射端由信号源、功率放大器与超声换能器组成。其中超声换能器由杭州瑞利超声科技有限公司生产,长35 cm、宽17.5 cm、高10 cm,内含8 个超声振子,工作频率为24 kHz,最大输出功率2000 W;功率放大器为HD-PA0830-6000 型,连续波输出最大功率为2000 W,脉冲输出最大功率为6000 W;信号源为Keysight 33612 型。
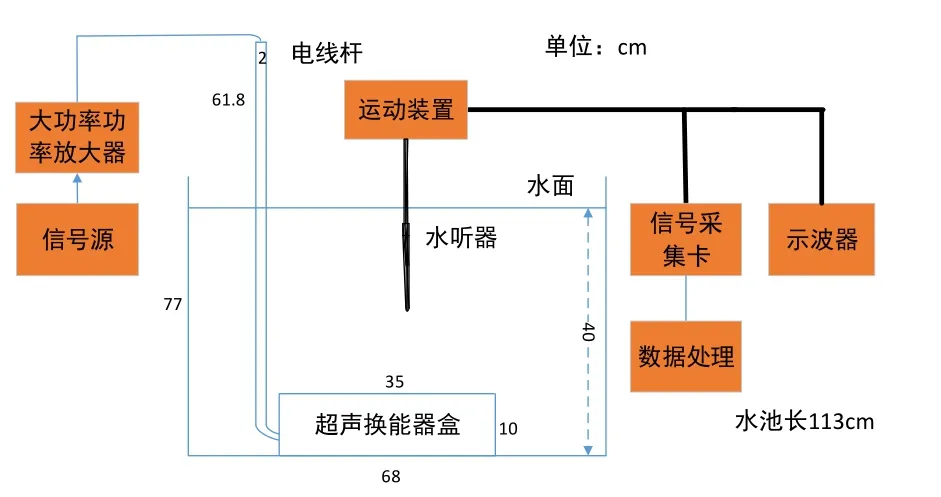
图6 试验系统示意图
4 试验与测量
将超声换能器放置于水槽的中心位置,水听器装上支架,固定于运动装置上。向水槽中加入自来水,至水深40 cm,水温为21.6℃。根据预先测量,无空化条件下换能器中心位置距换能器表面12.5 cm处声压幅值最大,因此选择该位置作为测量点。控制信号源调整换能器的输入电功率,使其由小到大递增。由采集卡采集水听器输出信号,采样率为200 kHz,采集时间为2 s。试验中,计算声压级SPL 时,参考声压pref为1 μPa,计算公式为SPL=20lg (p/pref),式中p 为水听器测得声压。计算得空化噪声连续谱积分值如图7 所示。

图7 瞬态空化连续谱积分
由图7 可知,空化噪声连续谱积分在SPL 为222.2~222.4 dB 范围内陡然上升,表示瞬态空化阈值约为222.3 dB。接着,随着SPL 增大,空化噪声连续谱积分也随之增大,瞬态空化强度不断增加,至225.8 dB左右后,空化噪声连续谱积分趋于稳定,说明瞬态空化达到饱和。同时,过强的瞬态空化也开始较多地干扰水听器的测量,致使数据起伏较大。
根据Sobotta、Jung 和Hertz-Eichenrode 等人对空化噪声中谐波的研究[10-11],以及IEC/TS 63001- 2019 中空化强度的测量方法,测得2.25 倍谐波噪声级如图8 所示。标准中规定使用2.25 倍谐波噪声级来判断液体介质中的空化强度,也可以判断空化阈值。其中,2.25 倍谐波噪声级Lcn225的计算公式如式(20)所示。

式中,p225为测得2.25 倍谐波噪声声压,pref为参考声压,pref=1 μPa。

图8 2.25 倍谐波噪声级
由图8 可知,2.25 倍谐波噪声级的增长趋势如直线a、b 所示,其交点即为2.25 倍谐波噪声级的增长趋势的转折点。IEC/TS 63001-2019 国际标准中,以该转折点为瞬态空化起始的判定。在图8 中,转折点位于222.2~222.5 dB 之间,说明该方法测得瞬态空化阈值约为SPL=222.3 dB。之后,随SPL 的增大而缓慢增加,瞬态空化强度不断增加,到225.8 dB左右不再上升,趋于稳定,说明此时瞬态空化达到饱和状态。
从上面的对比可以看出,经过格型自适应陷波器法处理后的空化噪声连续谱测量结果与2.25 倍谐波噪声级测量方法的结果相当吻合。
5 结论与展望
(1)瞬态空化噪声的频带宽会以连续谱的形式出现在其频谱中。随着输入声压级的增加,瞬态空化不断加强,最后达到饱和。
(2)空化噪声连续谱测量法利用格型自适应陷波器能较好地分离出空化噪声连续谱,并且对测量设备的要求较低,且操作相对简单。该方法与IEC/TS 63001-2019 国际标准中的2.25 倍谐波噪声级测量法的结果具有较好的一致性,两种方法均能用来确定瞬态空化阈值,并表示瞬态空化强度。
由于瞬态空化产生位置相对集中,今后可以尝试进一步测量瞬态空化在某一区域范围的分布,这更有利于研究超声清洗槽内的瞬态空化活动。当瞬态空化达到一定强度后,空化泡会影响水听器的测量,致使测量结果具有较大的起伏。如何解决该问题还需进一步研究。
