点云数据双向选择单木提取与地面数据匹配方法*
2021-04-10霍朗宁张晓丽
霍朗宁 张晓丽
(北京林业大学精准林业北京市重点实验室 北京林业大学省部共建森林培育与保护教育部重点实验室 北京 100083)
单木匹配指将基于遥感手段提取到的单木信息与地面实测单木信息进行一一匹配的工作,不仅是评价遥感反演单木信息精确度的一个重要环节,更在依据遥感信息制定森林经营管理计划中发挥着重要作用。近年来,随着机载激光雷达、无人机影像技术的不断发展,对森林信息的提取已可实现到单木尺度(陈崇成等, 2018; 李蕴雅, 2016; Kaartinenetal., 2012; Eysnetal., 2015); 然而,对单木信息的充分提取也给信息匹配带来了一定挑战。在高密度、多林层林分中,将遥感提取到的单木信息与实测单木信息进行一一匹配难度很大。以机载激光雷达技术为例,提取到的单木位置往往是树顶点,与实际树干位置不一定相符,甚至在一些特殊立地条件下,树顶点位置不一定在树冠范围内。因此,一种合适的匹配方法尤为重要,需以最合理的方式、最小的误差将尽可能多的遥感提取木与地面实测木相匹配。
目前,单木匹配方法主要包括以下3类: 1) 邻域最高匹配法,即从最高的LiDAR提取木开始,以其为中心划分圆形邻近区域,将该区域内最高的地面实测木作为匹配木(赵峰, 2007); 2) 距离最近匹配法,即将LiDAR提取木与距离最近的地面实测木相匹配(Morsdorfetal., 2004); 3) 树高、距离双因素匹配法,即同时考虑树高差和距离,选择二者之和最小者作为匹配木; 在实际操作过程中,为保证树高差和距离二者度量的均衡,会根据实际变动范围为其赋予不同权重(Kandareetal., 2016)。
在无人机影像信息提取方面以及机载激光雷达提取单木技术的发展初期,探测和分割往往集中于顶层林木(霍达, 2015; 王植槐, 2014; 赵峰, 2007),因此上述方法符合当时要求。然而随着技术的不断发展,尤其在机载激光雷达单木分割方面,近年来涌现出了更为高效、准确的提取方法(李平昊等, 2018; 苏练, 2017),如K均值聚类(Morsdorfetal., 2004; Guptaetal., 2010)、均值移动聚类(Ferrazetal., 2012)和自适应距离聚类(Leeetal., 2010)等,可以进一步利用三维激光点云空间信息,对下层林木具有更高的探测和提取效果(Lietal., 2012; Wangetal., 2020; Williamsetal., 2020)。在这种情况下,将激光雷达点云数据提取单木简单地匹配到距离最近或邻域范围内最高的单木显然不能得到合理的信息匹配结果,不仅会造成大量激光雷达点云数据信息浪费,更会引起激光雷达点云数据信息精度评价误差。鉴于此,本研究基于双向选择判断原理,添加反向确认过程,提出一种将激光雷达(LiDAR)点云数据提取到的单木信息与地面实测单木信息进行匹配的方法,以期得到更为合理的信息匹配结果。
1 研究区概况与研究方法
1.1 研究区概况 研究区地处我国甘肃省祁连山国家级自然保护区肃南裕固族自治县西水林场,为祁连山山区天然次生林、黑河流域水源涵养林,海拔2 700~3 000 m,属温度高寒半干旱、半湿润山地森林草原气候,阳坡为山地草原,阴坡为森林景观,林区主要森林类型为青海云杉(Piceacrassifolia)天然纯林(成熟林)。研究区位置、样地布置和原始点云示意如图1所示。

图1 研究区位置、样地布置和原始点云示意
1.2 数据获取与预处理 1) 机载LiDAR数据与预处理 机载LiDAR数据获取于2008年6月23日,无人机平均飞行海拔约3 560 m,距离地面飞行高度约760 m; 搭载LiteMapper5600 LiDAR系统,激光扫描仪为RiegILMS-Q560,波长1 550 nm,激光脉冲长度3.5 ns,激光脉冲发散角小于等于0.5 m·rad,地面平均光斑直径38 cm,可分辨目标的最小间隔0.6 m,脉冲重复频率50 kHz。
从原始点云中裁出与地面实测数据相匹配的100 m×100 m区域,采用Terrasolid软件进行点云去噪、地面点与非地面点分离、植被标准化,并去掉高度小于2 m的点云,获得样地林层点云作为算法的试验数据。平均点云密度2.86 m-2。
2) 地面调查数据 地面调查时间为2008年6月1—13日,沿山坡走势布设一块100 m×100 m超级样地,方位角约122°,按照25 m×25 m尺寸划分为16块子样地(图1)。对样地中林木进行每木检尺,记录林木胸径、树高、冠幅和枝下高,通过全站仪获取单木位置,共得到1 435株单木信息。本研究重点讨论LiDAR反演单木树高、冠幅、位置以及林分结构参数的精度,相关统计量如表1所示。
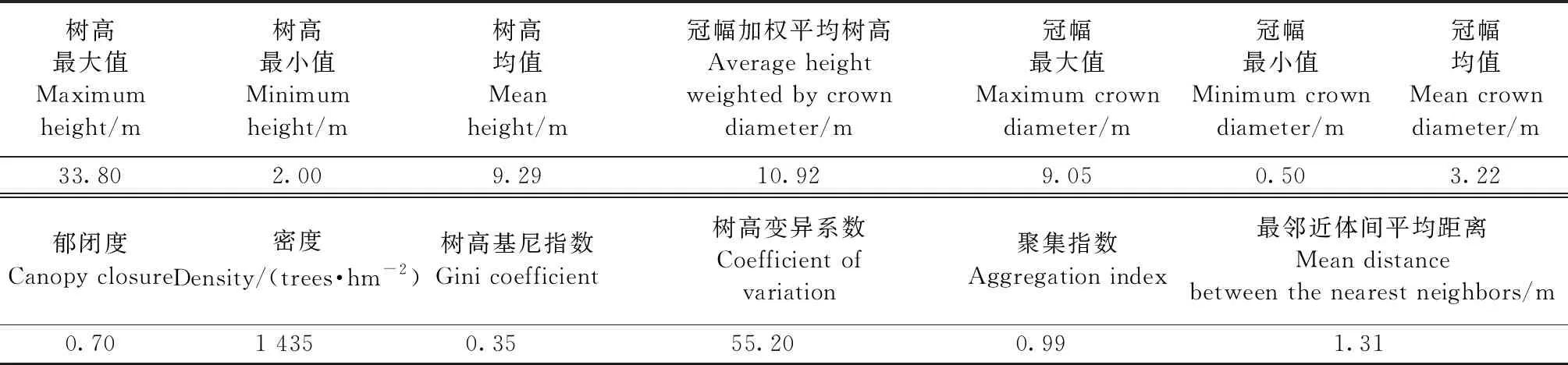
表1 超级样地林分信息
1.3 单木分割与信息提取 应用分层K均值聚类算法从激光雷达三维点云数据中分割单木,具体步骤为: 1) 对点云进行水平分层,并对每层点云分别提取点云高度局部最大值; 2) 以各层局部最大值为起始聚类中心进行K均值聚类,首先计算所有点云到聚类中心的距离,将点云归到离其最近的聚类中心所在的类,然后计算每一个聚类的平均点云坐标得到新的聚类中心,如果相邻2次聚类中心没有任何变化,则聚类调整结束; 3) 按照从上到下的顺序,将隶属不同水平层但聚类中心距离小于一定阈值的点云簇进行融合,得到分割后的单木点云; 4) 将点云坐标均值作为单木位置,点云高度最大值作为单木树高,计算点云平面投影面积,视为圆形计算其直径作为单木冠幅。
1.4 单木匹配方法 从原理上讲,双向选择判断法的优势在于同时关注待匹配的LiDAR提取木和实测木的邻域情况,具有逆向确认过程,可避免欠分割和过分割在匹配过程中的误差积累。具体实施步骤为(图2、3): 1) 从最高的LiDAR提取木A开始,以A为中心、5倍冠幅长度为半径,搜索与其树高差不超过其冠幅的地面实测木作为待选,将待选实测木按距离由小到大排序,如距离最近的地面实测木为1号待选木,距离第二近的实测木为2号待选木,以此类推,并计算待选木与LiDAR提取木的距离和树高差,设为ΔD1、ΔH1、ΔD2、ΔH2; 2) 暂时将1号木作为准匹配木B,比较1号木和2号木分别与LiDAR提取木的距离和树高差,若2号木树高差小且距离比1号木远,不超过2 m,即ΔH2<ΔH1且ΔD2-ΔD1<2 m,则2号木变更为准匹配木,再与3号木进行比较,以此类推,至所有待选木判断完成,决策出准匹配木B; 3) 以准匹配木B为中心,判断LiDAR提取木A是否为其周围距离最近且树高差最小的林木; 如果同时满足这2个条件,则A与B匹配成功,不参与之后的步骤; 如果不同时满足这2个条件,则A待所有LiDAR提取木完成步骤2、3后进行第二轮匹配; 4) 对所有LiDAR提取木按照树高由大到小依次进行步骤1、2、3,至所有提取木均经过以上步骤匹配工作,之后对其中不满足步骤3匹配条件的林木进行多轮匹配,至满足所有匹配条件的配对树不再增多,则算法结束。
本算法中使用了一些人工确定的阈值参数,如定义邻域范围条件、是否变更候选木等,这些参数根据具体林分条件确定,如林木间最小距离、林木平均树高、冠幅等。在实际应用中,可从激光雷达点云数据提取的信息中计算这些参数,也可直接从地面实测数据中获取相关信息。

图2 双向选择判断步骤示意

图3 双向选择判断法流程
1.5 精度评价 为区分不同匹配方法的匹配效果,以所有地面实测木均应得到匹配为理想状态,设计匹配效果评价指标。
1) 漏匹配率(omission error, OE) 没有匹配的地面实测木数量占所有地面实测木数量的比例:
(1)
式中:Nref为地面实测单木数量;Nmatch为成功匹配单木数量。
2) 错误匹配率(commission error, CE) 本不应该匹配却匹配成功的林木数量占所有地面实测木数量的比例,其中不应该匹配却匹配成功的林木数量以聚类林木数量与匹配林木数量的差值代替:
(2)
式中:Ntest为点云数据中获取的单木数量。
3) 匹配精度(match accuracy index,Amatch) 设理想状态下匹配精度为1,减去漏匹配率和错误匹配率,以此融合2方面因素:
Amatch=1-OE-CE。
(3)
2 结果与分析
2.1 单木分割 单木分割后,共提取到1 273株单木。在Matlab软件中将LiDAR提取的林木点云赋予不同颜色,如图4所示。为模拟正射影像图,分别列出树高大于15、10、5 m和所有林木的聚类垂直投影,保证上层林木效果不变,不断叠加下层林木。
2.2 单木匹配 图5给出了针对分层聚类情况使用双向选择判断法进行单木匹配的结果。由于林木较多、林分密度较大、林木距离较近,为便于观察,分别对树高大于15 m以及10~15、5~10、2~5 m 4个林层单独绘图。可以看出,大部分林木可在冠幅范围内完成匹配,当林分密度较大时,有超过冠幅范围的情况,但距离不会超过冠幅长度,否则不会显示匹配成功。在2~5 m林层匹配图中出现冠幅明显大于实际值的情况,但不是因匹配造成,而是受目前单木冠幅提取算法限制,冠幅精确度仅为60%左右。

图4 树高大于15、10、5 m和所有林木的聚类垂直投影

图5 各林层单木匹配情况
为了证实本研究提出的双向选择判断法在单木匹配方面的优势,分别采用邻域最高匹配法、最邻近匹配法、双因素匹配法和双向选择判断法对同一聚类结果进行匹配,并重点分析匹配情况以及单木树高、冠幅精度。针对某种匹配方法,设置的匹配条件越严格,单木精度越高,匹配成功的林木数量越少,因此可通过调节匹配条件,获得不同匹配方法下匹配精度近似而单木树高精度不同或单木树高精度大致相同而匹配精度不同的结果。由表2、3可知,当匹配精度在61%左右时,不同匹配方法的单木树高精度差异较大,最邻近匹配法精度最低,双向选择判断法精度最高; 单木冠幅精度也表现出同样趋势,当不同匹配方法的单木树高精度在91%左右时,双向选择判断法具有最优的匹配精度和冠幅精度。
为探究4种匹配方法对不同级别树高的匹配精度差异,以5 m为一级划分林层,分别计算匹配精度。由图6可知,总体来说双向选择判断法的匹配精度最高,尤其在2~10 m的下层林、中层林中表现突出; 邻域最高匹配法在上层林表现较好,尤其是树高20~25 m的最上层林木,提取精度甚至超过双向选择判断法,但在下层林提取方面表现不佳; 最邻近匹配法与双因素匹配法精度差异不大,均低于其他2种匹配方法,且特色不突出。

表2 匹配精度相近时不同匹配方法所得单木树高、冠幅精度比较

表3 单木树高精度相近时不同匹配方法所得匹配精度、单木冠幅精度比较

图6 4种匹配方法在各林层的匹配精度
3 讨论
将聚类得到的林木信息与地面实测林木信息进行匹配是一项重要工作,根据匹配结果可对比判断不同分割方法的优劣,还可进一步将激光雷达点云数据信息产品向应用产品转化,如完成单木尺度管理决策、可视化经营等工作。本研究提出一种双向选择判断的数据匹配方法,其突出特点是不仅经过单向选择过程,更从候选木角度判断这一匹配是否为全局最优匹配。如激光雷达点云数据中单木为A,地面实测单木为B,先从A的邻域中通过条件确定B,再从B的邻域中判断A是否为B的最佳匹配。此外,候选木B的确定也经历了对比分析过程,以距离为主要条件,辅助树高差信息,也是该方法的特色之一。
一种合适的匹配方法包括2方面: 一是匹配原理,不同匹配原理所侧重的信息是不同的,如本研究中探究的4种匹配方法,邻域最高匹配法、最邻近匹配法、双因素匹配法均以聚类林木为中心,分别以树高差、距离以及二者综合作为判定信息,双向选择判断法则先以聚类林木为中心挑选地面实测林木,再以地面实测林木为中心检验聚类林木; 二是匹配条件,即最大距离、树高差的阈值设置,需要根据林分实际情况进行设定; 如匹配条件过于严苛,不仅导致匹配成功的林木数量较少,聚类有效性低于应有水平,还会使单木信息精度虚高,无法代表整体林分情况。
针对不同类型林分和研究目的,适用的匹配原理也存在差异: 1) 很多研究采用人工目视解译方法进行匹配,大多是林木数量少、林分稀疏或需要重点研究匹配错误原因的情况,虽然在研究中较为适用,但不适合推广(Lietal., 2012); 2) 对于结构单一林分,如人工栽植的纯林、单林层林分和稀疏林分,由于林木相互之间距离大、遮挡不严重,林木的实际位置不会超过冠幅范围,且聚类得出的冠幅范围内有且仅有1株实测林木,这种情况比较适用于最邻近匹配法; 3) 对于重点提取林分优势木的林分,如计算地位级、林分择伐作业等特殊性工作,可采用邻域最高匹配法; 4) 对于郁闭度高、林分垂直结构复杂、林木相互之间遮挡严重的林分,则应采用双向选择判断法,以保证在林木冠幅范围内选择出最合适的匹配木。
同时,针对不同遥感数据类型,也可选择不同匹配方法。适合本研究提出的双向选择判断法的遥感数据类型包括高密度机载激光雷达数据、地基激光雷达数据和地基近景摄影等,即对高密度、多林层林分有较强单木探测和信息提取能力的遥感数据类型; 对于卫星影像、无人机CCD影像等数据类型来说,只能对主林层的单木有较好探测,因此选择邻域最高匹配法或最邻近匹配法均可。
4 结论
本研究基于双向选择判断原理,提出一种将激光雷达点云数据提取到的单木信息与地面实测单木信息进行匹配的方法,并应用于一块林木密度高、空间结构异质性大的复层林进行效果对比验证。结果表明,与邻域最高匹配法、最邻近匹配法和双因素匹配法相比,双向选择判断法可给出更为合理的信息匹配: 在匹配精度一致的情况下,匹配的单木树高精度可从75.21%提升至91.01%,冠幅精度从60.50%提升至68.64%; 在保证匹配信息精度一致的情况下,可将匹配精度从传统方法的33.52%提升至61.11%。点云数据双向选择单木提取与地面数据匹配方法可快速、高效地将激光雷达点云数据提取到的单木信息与地面实测单木信息进行匹配,从而更高效利用激光雷达点云数据信息,为地面实际林木管理工作奠定技术基础。
