Delta机构的装箱机器人的工作空间及轨迹规划
2021-04-01韩基伟孟钢钳
韩基伟,孟钢钳
许昌电气职业学院(许昌 461000)
在食品、医药等轻工业领域,存在着大量重复性高的劳动,例如分拣、拾取装箱的工序,这些工作一般由人工完成,不仅劳动强度大而且会具有一定的污染风险,致使企业成本也较高。随着生产技术的提高,人工作业越来越不满足生产需求,工业机器人应运而生[1-6]。开链式的串联机器人被最先作为机械手臂应用于各个行业,但是串联机器人虽然数学模型简单,但是其结构较复杂,不适用于高速的轻工业领域。1987年澳大利亚的Hunt教授将并联机构应用于机械手,开拓了高速机器人的新天地。并联机器人具有动态性能好、精度高、高速性能强等优点,但其数学模型较复杂,越来越多的学者投入到并联机器人的研究。并联机器人具有多种结构形式,其中Delta并联机器人是其中最典型也是应用范围比较广的一种结构式[7-8],比较适用于小物件的抓取和放置,该文主要针对基于Delta机构的并联装箱机器人进行工作空间及轨迹规划研究。
1 机器人基本结构
根据食品装箱生产线的要求,机器人需要将生产线上的食品物料按照一定排列规则放置在包装箱内,其工作流程为:机器人抓取传送带上的物料,然后按照一定路线将物料运送到包装箱上方,然后按照设定的角度将物料放置在包装箱内。
根据作业要求,此机器人选用基于Delta机构的并联机器人,它是在常用的三自由度Delta机器人的基础上增加一个绕Z轴旋转的转轴,组成为一台四自由度的并联机器人,其基本结构如图1所示。该机器人主要由静平台、动平台、旋转轴、3组相同的铰链及其驱动部件等组成。静平台作为固定机构,一般与固定机器人的装置固连,其上装有铰链的驱动部件、旋转轴的电机及图像处理装置等。动平台上装有末端执行器,末端执行器一般采用气动吸附装置。3组相同的铰链驱动部件由伺服电机和减速器组成,它们分别独立驱动3个铰链同时运动,动平台的运动是3个铰链运动的复合。旋转轴的转动由装在静平台上的转轴伺服电机单独驱动,实现末端执行器的转动。
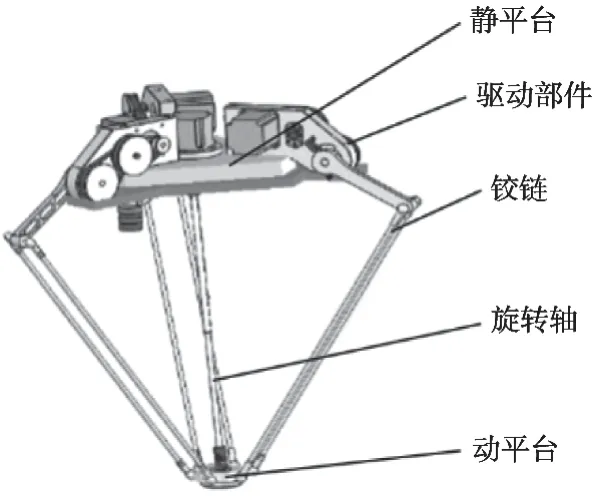
图1 机器人基本结构
2 工作空间分析
机器人的工作空间是指机器人的末端执行器能够达到的点的集合[9-10]。并联机器人由于结构的限制,其工作空间一般比较小,所以比较适用于小范围的搬运。在实际操作中,由于受到结构的限制,机器人工作空间内的点并不是都可以从任意点、任意方向都能到达的,所以需要计算其有效工作空间,有效工作空间是指机构在运动时,能从任一点、任意方向都能达到的点的集合[11]。
在实际设计时,需要根据工作需求实际确定其有效工作空间,机器人的工作空间主要由动平台和静平台的大小、主从臂的长度及铰链运动的干涉等因素决定[12-13]。在满足工作空间需求的前提下,机器人的各个大小尽量小,从而保证机械手具有较高的灵活性和工作效率,设计中需要避免运动中出现奇异点。
把机器人结构模型简化后,得到其空间几何模型图,如图2所示。以静平台的中心点为原点建立静坐标系OXYZ,以动平台的中心点为原点建立动坐标系O’X’Y’Z’,设动平台中心点的坐标为(x,y,z),主动臂与静平台平面的夹角为θi,铰链在静坐标系平面的分布角为αi,主动臂臂长为l1,从动臂臂长为l2,静平台半径为R,动平台半径为r。

图2 机器人结构简化模型图
对于单支链,由空间几何关系,得到其矢量关系式为

而各点在静坐标系内的位置适量为

将各点的位置矢量代入式(1),可以得到单条支链的方程为

将式(2)用MATLAB编程计算,可以得到单条支链的运动空间图,如图3所示。
因为机器人的运动是由3条运动支链共同驱动完成的,所以机器人的工作空间为3条支链运动空间的交集。设3条支链在静坐标系平面的分布角αi分别为-30°,90°和210°,3条支链运动空间的集合如图4所示,它们的相交部分即为机器人的运动空间。
由图4可以看出,机器人的工作空间近似于一个半球体,但当机器人运动到工作空间的边界时,机器人的整体运动性能会较差,容易出现运动失真,所以需要舍弃边界部分,取其有效工作空间。设主动臂臂长l1=200 mm,从动臂臂长l2=510 mm,静平台半径R=200 mm,动平台半径r=40 mm,机器人的有效工作空间如图5所示。
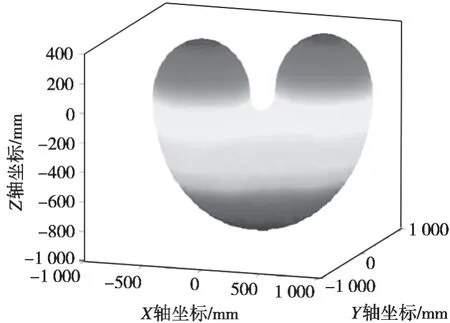
图3 单条支链的运动空间图

图4 3条支链运动空间的集合

图5 机器人的有效工作空间
3 运动学仿真
轨迹规划是指在已知起始位置和目标位置的前提下,通过一些计算方法和规则,机器人可按既定的路线、速度和加速度完成位置的变换[14-15]。为了保证机器人能够高速精确地完成抓取装箱动作,必须对机器人进行合理的轨迹规划,运动轨迹的好坏会直接影响机器人的工作效率。
按照食品装箱的作业需求,机器人需要完成的动作为抓取物料→竖直提升→水平移动→旋转一定角度→竖直下降→放置物料。具体运动过程为机器人末端执行器抓取传送带上的物料,为了避免运动时发生干涉,需先竖直向上提升一定高度,然后水平移动到包装箱上方,按照排列规则旋转一定角度,最后竖直下降到相应位置后释放。所以机器人走的路线轨迹为如图6所示的门字形路线。为了保证机器人在运动过程中的平稳性,避免发生抖动和速度、加速度的突变,每段轨迹的连接处引入圆弧过渡,见图5中的P5P6和P7P8阶段。

图6 机器人路线轨迹图
设起始点P1的坐标为(x1,y1,z1),终点P4的坐标为(x4,y4,z4),避障高度为∣P1P2∣=b,直线下降距离∣P8P4∣=h,过渡圆弧半径为d,水平直线运动距离为∣P6P7∣=2c,可以得到

所以:

O2点的坐标为
机器人运动速度的控制现在常用的是S形速度曲线,它在不同时间的一阶导数均是连续变化的,可以保证机器人在运动过程中速度均是平滑过渡,无冲击,但是传统的S形曲线存在初始速度和末端速度相等的限制,会限制机器人的工作效率,所以对传统的7段曲线进行修正,将匀速阶段并入加减速段,修正加速度运动表达式,如式11所示。

式中:T为机器人完成一段运动轨迹用的总时间,s;amax为设定加速度的最大值,mm/s2。
设轨迹起始点的坐标为P1(-200,200,500),轨迹终点的坐标为P4(200,-200,500),圆弧半径为50 mm,在MATLAB中仿真得到机器人的运动轨迹,如图7所示[16]。

图7 机器人的运动轨迹图
各个铰链电机转角变化曲线如图8所示。可以看到,各个铰链的电机转动曲线平滑,无突变,机器人运行平稳,说明轨迹规划符合机器人运行要求,能够使机器人平稳运行、无抖动缺陷,机器人具有较好的运动特性。

图8 铰链电机转角变化曲线图
4 结论
传统的依靠人工进行装箱包装的方式已经不能满足食品包装行业的高速发展,装箱机器人应运而生。根据食品装箱生产线的基本要求,设计了基于Delta机构的并联装箱机器人,介绍了其基本结构,运用空间几何原理得到了机器人的有效工作空间,引入过渡圆弧对机器人的运动路径做了轨迹规划,运用修正梯形加速度曲线对机器人运动时的加速进行设定,通过MATLAB仿真得到机器人的运动轨迹图和各个铰链电机转角变化曲线,机器人运行平稳,无抖动缺陷,机器人具有较好的运动特性。此次试验为食品装箱生产线的自动化提供了一种解决方案,为基于Delta机构的并联机器人的工作空间及轨迹规划研究提供了理论分析基础。
