100 m新型极地探险邮轮振动特性研究
2021-03-31刘甄真江国和葛珅玮徐天南刘嘉麟
刘甄真,江国和,葛珅玮,徐天南,刘嘉麟,吴 刚
(1.上海海事大学 商船学院,上海 201306;2.招商局邮轮制造有限公司,江苏 海门 226100)
100 m新型极地探险邮轮为国内首制X-BOW型极地探险邮轮,具有设备多动力大、船体结构与机舱内布置复杂等特点,如图1所示。主要动力设备的运行使该船易产生舱室振动噪声问题,影响船上工作人员和乘客的舒适度。为了有效控制邮轮的结构振动与舱室噪声,需要在设计阶段,获取主要激励源的输入激励,并对其进行振动特性仿真预报和分析。

图1 100 m新型极地探险邮轮Fig.1 100 m new polar explortion cruise
王蒙蒙等[1]在已知船舶的质量、刚度、阻尼以及实测尾端振动速度的条件下,反推出螺旋桨叶频激励力,并验证了其准确性,为螺旋桨激励力的求解提供有效途径。庞福振等[2]利用半解析法研究了圆柱壳体的振动特性,求解了圆柱壳体的受迫振动特性方程,并分析了边界特性和结构参数对圆柱壳体受迫振动的影响。曹跃云等[3]基于工况传递路径分析,将多源信号视为卷积混叠,提出耦合振动噪声源分离方法,并建立了船舶 OPA(operational transfer path analysis)模型,结合船舶传递路径振声测试试验验证了模型的可行性和正确性。陈占阳等[4]结合自航分段模型试验对某超大型高速船舶在迎浪中的振动响应进行了模拟仿真,研究了振动响应沿船长的分布规律,并对振动响应随着海况与航速的变化规律进行了分析,最后基于三维时域非线性水弹性理论对该船船舯合成弯矩及鞭状效应进行了模拟预报,并通过实验验证了计算结果的准确性 。路广霖等[5]基于传统传递路径原理,提出一种基于加权正则化的改进传递路径分析技术,并准确识别发动机多源激励载荷,提供了可靠的振动贡献量分析结果。
目前国内没有开展对该船型的振动研究,本文对母型船进行了湿模态分析、主要激励源分析计算和激励源对各舱室房间的贡献率,为后期制造的同类型船提供设计参考。
1 新型极地探险邮轮的模态分析
为分析极地探险邮轮模态,建立有限元模型。模型全长104 m,船宽18 m,水线高5.1 m,整船质量为4 265 t,模型附加质量和重心严格遵照质量重心报告,如图2所示。网格尺寸以400 mm×400 mm为主,板结构为quad4单元和tria3单元,梁结构为bar2单元,结构阻尼因子取2%[6]。
图2 新型极地探险邮轮有限元模型Fig.2 The finite model of new polar explortion cruise
采用附加虚质量的方法进行湿模态计算,求解附加质量矩阵,来体现不可压缩流体对于结构产生的作用,这是虚质量法的核心所在[7]。对于无阻尼结构,流固耦合中结构的运动方程为[8]
(1)
式中:Ms,Ks分别为结构的质量矩阵和刚度矩阵;B为流固耦合矩阵;p为流体动压力;f0为外界激励。离散化后的流体运动方程可以表示为
(2)
式中:H为流体刚度矩阵;ρ为流体密度。联立式(1)和式(2),且当考虑自由振动时,有
(3)
求解式(3)可得
(4)
式中,Ma为流体附加质量,Ma=ρBTH-1B。
利用Nastran中的MFLUID卡片进行流体附加质量设置,设置程序如下:
CEND
MFLUID=1
……
param,vmopt,1
MFLUID,1,5 100.0,1.0-9,1,N,N
ELIST,1,1,THRU,12 227
基于虚质量法的湿模态分析,获取新型极地探险邮轮的前四阶固有频率及阵型,表1为各阶固有频率,图3为各阶模态阵型。

表1 前四阶模态Tab.1 The first four modal

图3 前四阶模态阵型Fig.3 The first four modal shapes
引起船舶稳态强迫振动的主要原因是船上往复式机器的不均衡惯性力和螺旋桨引起的干扰力以及高速船附近空泡引起的[9],当邮轮高速航行时,螺旋桨叶上会产生大量空泡,使得桨叶在船底上产生的脉动压力将极为严重[10],根据研究,在螺旋桨振源中以螺旋形诱导的表面力为最主要因素[11],同时,由于减摇鳍发动机等动力设备功率相对较小,且安装了隔振装置,对各房间舱室振动贡献较小,因此文中激励源仅考虑主机激励力和螺旋桨脉动力。
新型极地探险邮轮采用双桨双舵,桨直径为3 100 mm,80%额定工况转速为192 r/min,螺旋桨激励叶频可通过式(5)计算得出
(5)
式中:n为转速;Z为螺旋桨叶数,因此可得螺旋桨脉动激励叶频为12.8 Hz。
主机发火频率可根据式(6)计算获得
(6)
式中:n为转速;Z为缸数;四冲程柴油机m为0.5。新型极地探险邮轮内有两种四冲程主机其中主机分别为8缸和6缸,80%额定工况转速都为1 000 r/min。由式(6)可知,两种主机发火频率分别为66.8 Hz和50 Hz。
主机基频可根据式(7)计算获得
(7)
可求得两种主机的基频都为16.7 Hz。
由表1可知,在80%额定工况下,激励主频不处于整船共振频率范围内,即新型极地探险邮轮不存在整船共振的风险,初步验证了该船型结构振动特性的合理性。
2 新型极地探险邮轮激励力分析
求解激励力主要用到传统的传递路径分析原理,传统的传递路径分析适用于线性的、时不变系统[12],主要原理如图4所示。
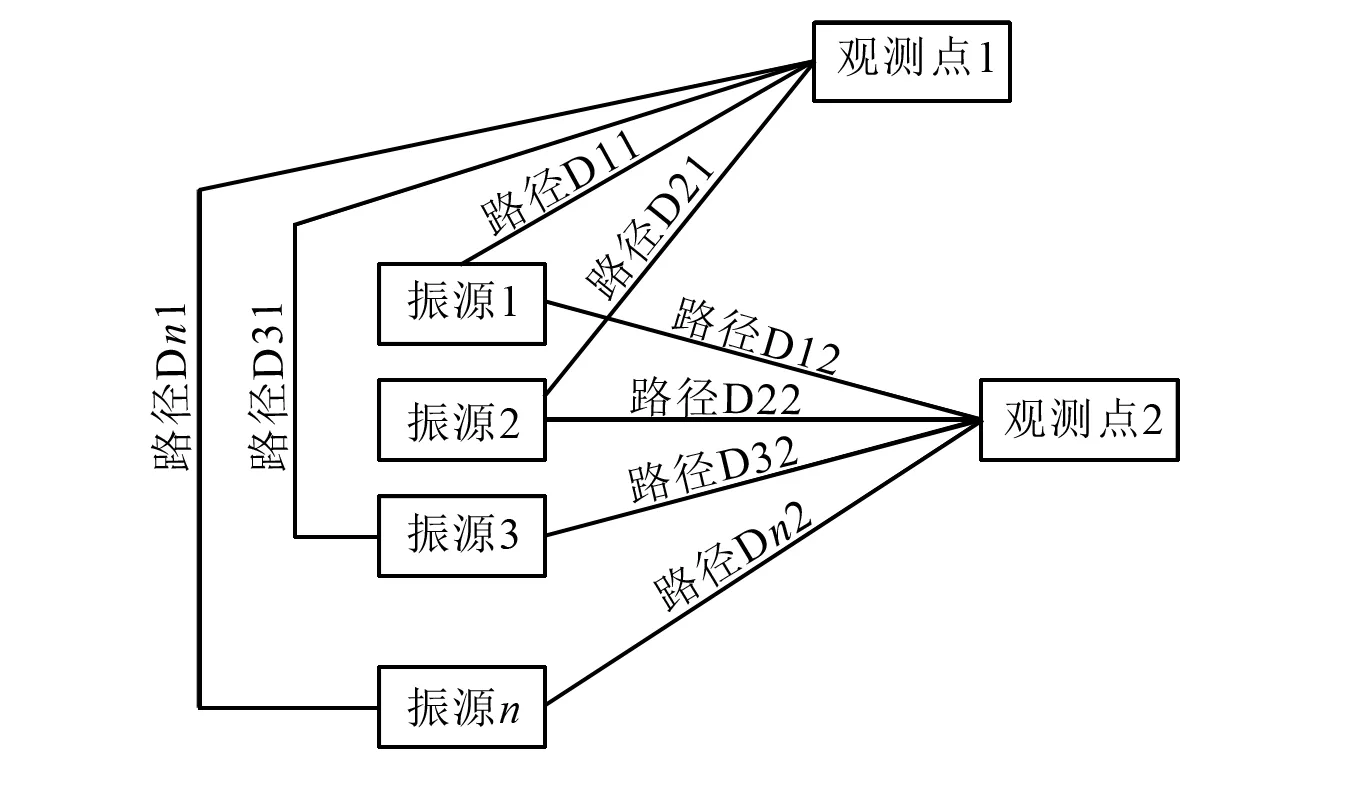
图4 传递途径分析示意图Fig.4 The sketch figure of transmission path analysis
假定Fn为各振源激励力,Vm为观测点振动速度响应,Dnm为振源激励点n~观测点m的传递路径导纳,则可得式(8)
(8)
若Vm和Dnm已知,上式左右同时乘以导纳矩阵的逆矩阵,可得式(9)
(9)
为了保证方程有解,令m=n,使导纳矩阵为一n×n阶矩阵,即可求出激励力。
2.1 螺旋桨脉动激励
船底表面的脉动力即为螺旋桨直接激励船体的表面力,为计算螺旋桨脉动激励,应获取振动速度和传递路径导纳。在新型极地探险邮轮试航期间,选取螺旋桨正上方的船尾底板作为测试对象,共布置6个测点,如图5所示,现场测试如图6所示。
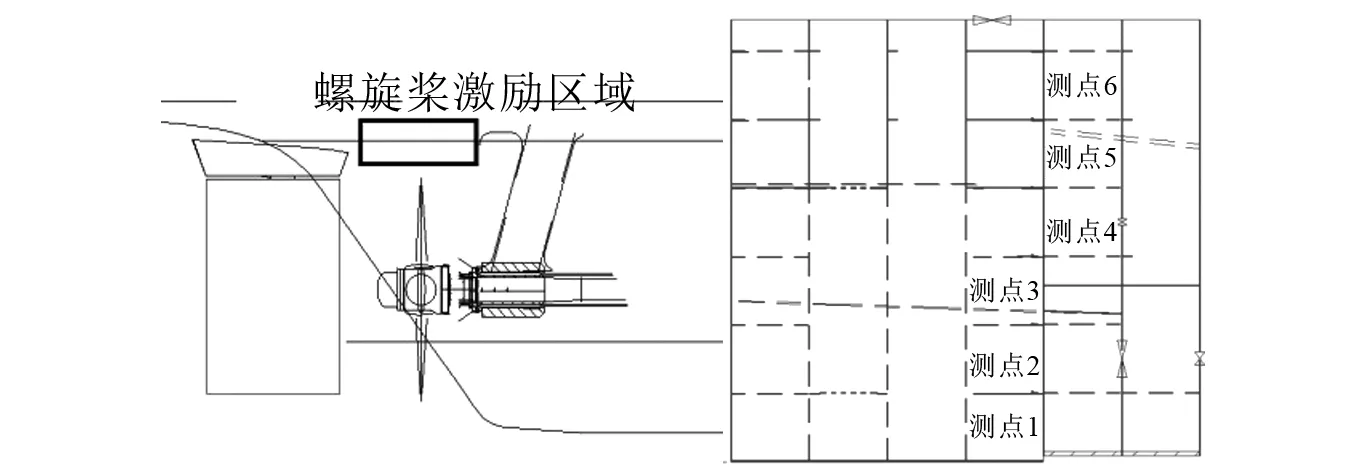
图5 振动速度测点布置Fig.5 The arrangement of vibrated velocity test points

图6 现场测点布置图Fig.6 The test in site
通过测试,获取80%航行工况下螺旋桨正上方船底板的振动速度,如图7所示,用Vn表示测点n的振动速度,n=1,2,…,6。

图7 螺旋桨正上方船底板振动速度Fig.7 The vibrated velocity of hull plate above the propeller
螺旋桨脉动激励为非均匀分布的压力场,因此需要先确定螺旋桨脉动激励作用区域,一种较为实用的方法就是选取螺旋桨上方面积约为螺旋桨直径D平方的区域内为螺旋桨脉动激励区域[13],如图8所示。

图8 螺旋桨脉动激励区域Fig.8 The excited area of propeller pulsatory force
由于螺旋桨脉动激励为非均匀分布压力场,所以需要一种简化的方法来模拟非均匀分布压力场。将左右舷螺旋桨脉动激励区域分别划分为6个受力区域,这6个受力区域共同承载螺旋桨非均匀分布压力场,而每个受力区域为均布压力场。用Fn表示第n个受力区域承载的表面合力,如图9所示。
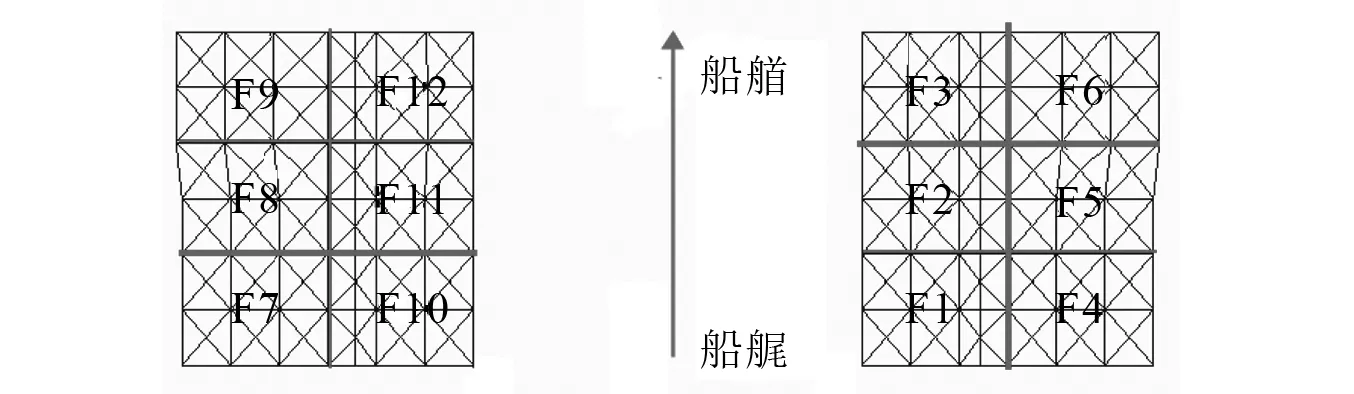
图9 螺旋桨脉动激励受力区划分Fig.9 The partition of excited area of propeller pulsatory force
为获取各受力区域到各观测区域的传递路径导纳,令Fn在全频段等于1N(n=1,2,3…,12),并加载在邮轮有限元模型各个受力区域上,分别对各个观测点进行频响分析获取传递路径导纳,图10为右舷各螺旋桨激励受力区到测点1的导纳曲线。对比图7和图10,可发现导纳曲线在12.5 Hz和25 Hz处平坦,没有共振波峰,因此振动速度低频12.5 Hz和25 Hz处的波峰频率对应螺旋桨脉动激励的叶频和倍叶频,而导纳曲线在100~150 Hz内有明显的共振波峰,因此振动速度在100~150 Hz内的波峰频率对应船底局部结构的共振频率。

图10 右舷各螺旋桨激励受力区到测点1传递路径导纳Fig.10 The admittances from propeller excited area partitions to test point1 in starboard
由于存在主机激振力,需要考虑主机激励力观测点振动速度是否有影响,因此选取主机基座上离观测点最近的激励点,在该激励点上加载全频段的单位力进行频响分析并获取传递路径导纳,图11为主机激励点和螺旋桨激励点1到观测点1的传递路径导纳对比,由图可知主机激振点到观测点1的导纳远小于螺旋桨激振点到观测点1的导纳,且主机已进行隔振处理,因此在反推螺旋桨脉动激励时,可忽略主机激励对测点速度的贡献。
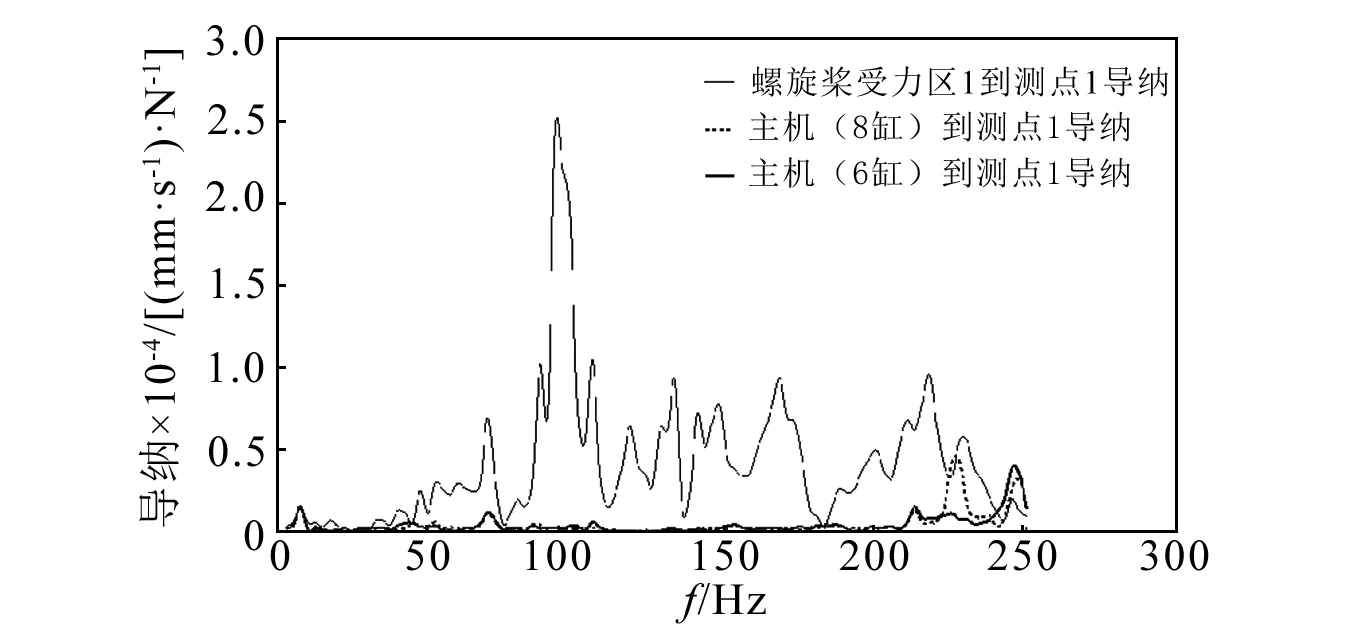
图11 激励源到测点1的传递路径导纳对比Fig.11 The comparison of admittances from excited sources to test point1
分别将传递路径导纳Dn,m和测点速度Vn代入式(7)中,可得

(10)
由于两个螺旋桨为反对称布置,因此表面合力也应反对称,即
(11)
因此式(10)可转换为
在式(12)的左右同时乘以导纳矩阵的逆矩阵,可得
基于MATLAB软件对式(13)进行数值求解,最终可求得螺旋桨脉动激励力如图12所示,由图12可知,螺旋桨脉动激励力主要分布在半叶频7 Hz、叶频12.5 Hz和倍叶频25 Hz附近,其中叶频处最为明显。
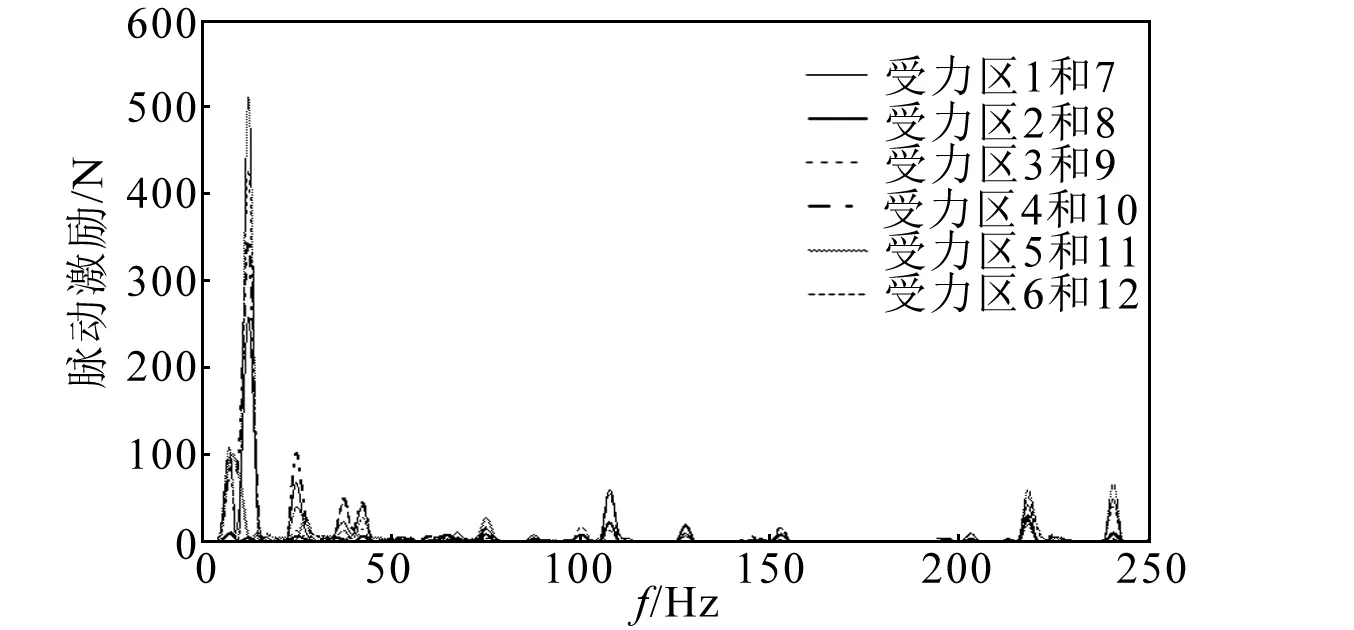
图12 螺旋桨脉动激励Fig.12 The propeller pulsatory excited force
2.2 主机激励
新型极地探险邮轮内有四台四冲程主机,主机和发电机为一体化设计,主机舱布置如图13所示,其中主机A和主机C型号为瓦锡兰8L20,最大功率为1 600 kW,缸数为8,主机B和主机D型号为瓦锡兰6L20,最大功率为1 200 kW,缸数为6,额定转速都为1 000 r/min。由式(6)可知,主机A和主机C的发火频率为66.8 Hz,主机B和主机D的发火频率为50 Hz。

图13 主机布置图Fig.13 The layout of the main engines
在主机与基座的螺栓连接处布置测点,并进行编号,主机基座有限元模型及测点编号布置如图14所示。在测点1处测得振动速度,如图15所示,由图15可知,主测点1的振动速度的四个主波峰频率分别为12.5 Hz,17.5 Hz,25 Hz,50 Hz和67.5 Hz,分别对应螺旋桨脉动激励的叶频、倍叶频与主机的基频、发火频率,因此在反推主机激励力时,需要考虑螺旋桨脉动激励对各测点振动速度的贡献和主机之间的相互作用。
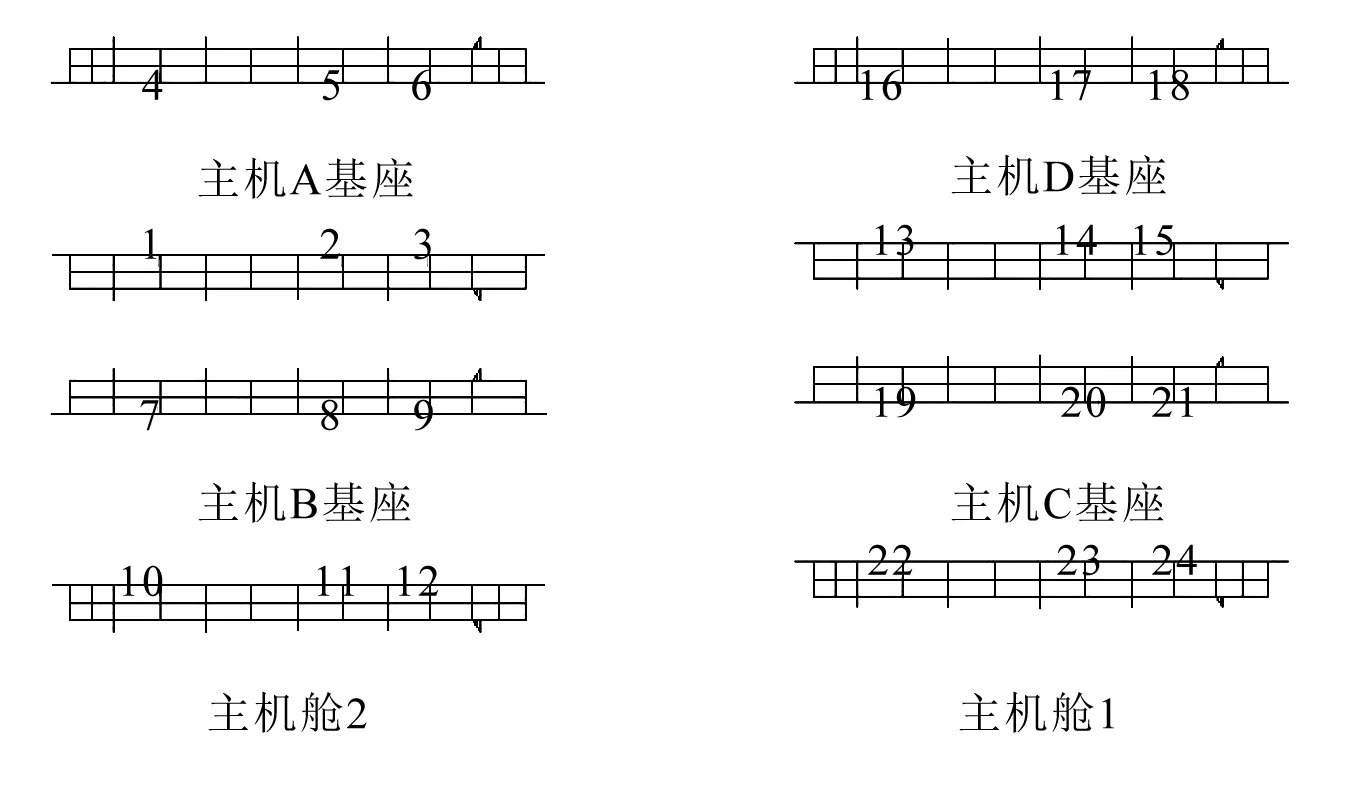
图14 主机基座有限元模型和测点布置Fig.14 The finite model of main engine foudations and the arrangement of test points
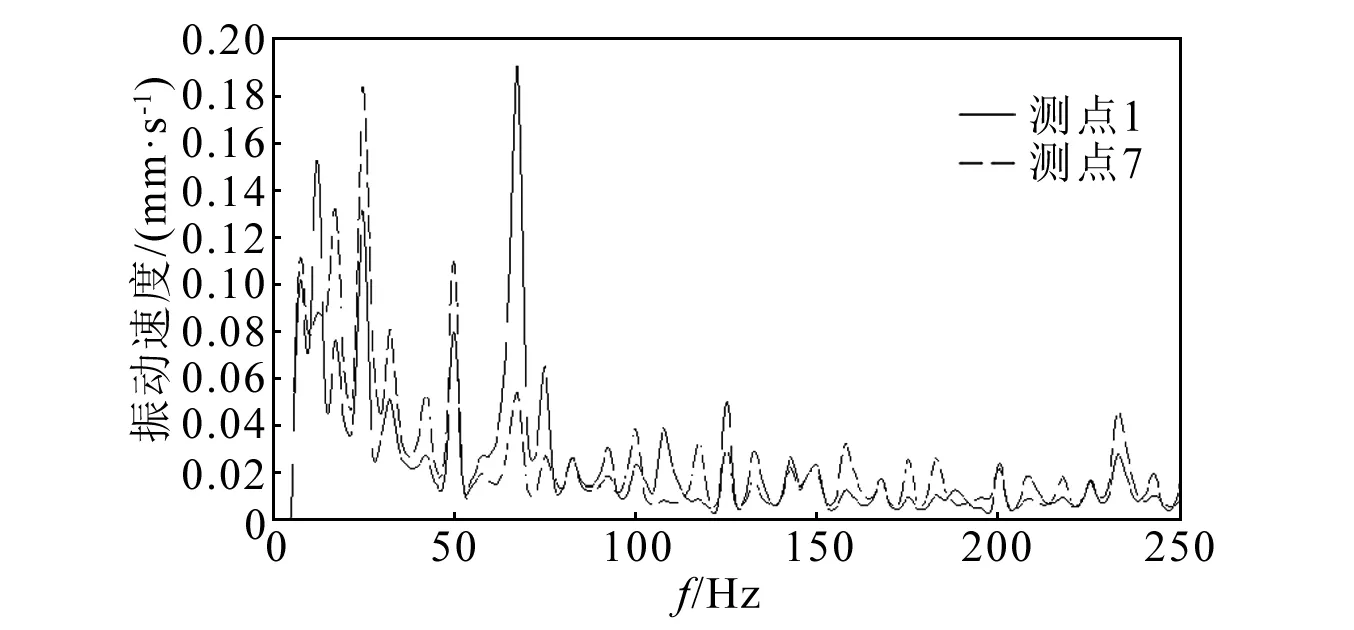
图15 测点1和测点7的振动速度Fig.15 The vibrated velocity of test point 1 and 7
为验证主机激励之间的相互影响,在主机基座上各机脚处分别施加全频段单位力,并进行频响分析以获取各个传递路径的导纳,以主机舱2内的主机A基座测点1为研究对象,首先分析相邻舱室基座的影响,如图16所示为测点1、测点13、测点19到测点1的传递路径导纳,由图16可知主机舱1两个基座测点13和测点19到测点1的传递路径导纳远小于测点1原点导纳,因此在在反推舱室2主机基座的主机激励力时,可以忽略舱室1中的主机激励贡献。

图16 测点1、测点13、测点19到测点1的传递路径导纳Fig.16 The admittances from test point 1,13,19 to test point 1
同样以测点1为研究对象,分析主机舱2内各测点激励的相互影响,如图17所示为测点1~测点3、测点4、测点7~测点9、测点10到测点1的传递路径导纳。
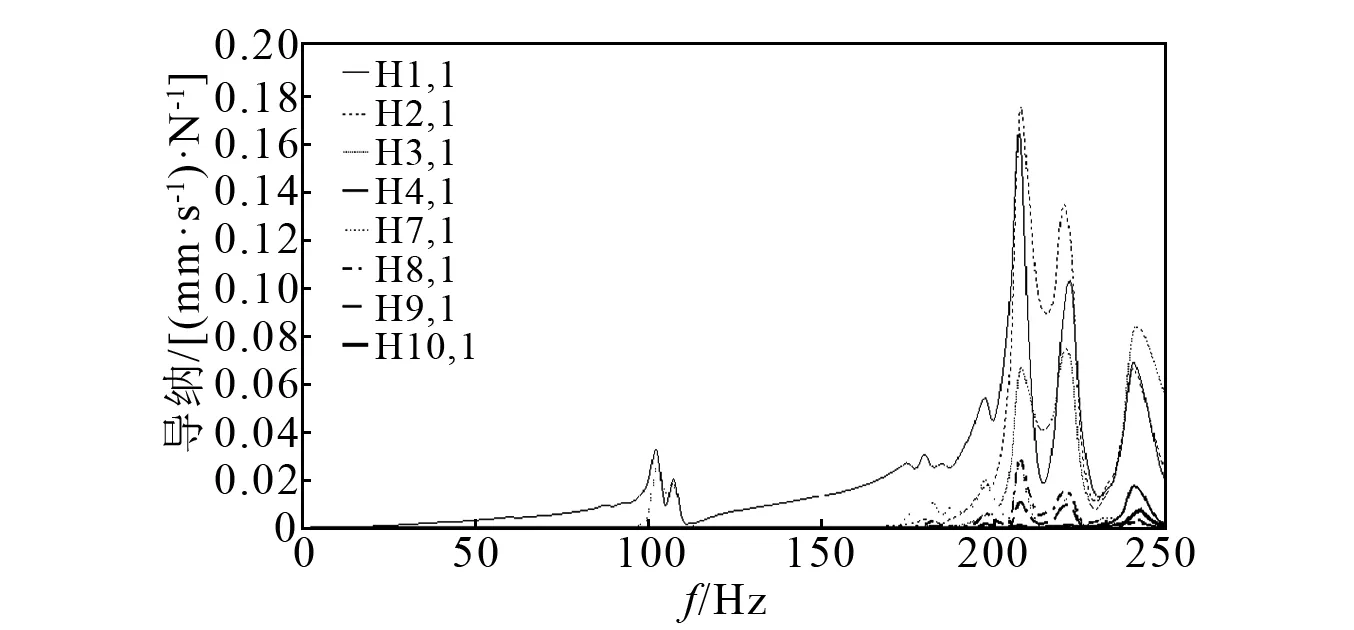
图17 测点1~测点3、测点4、测点7~测点9、测点10到测点1的传递路径导纳Fig.17 The admittances from test point 1-3,4,7-9,10 to test point 1
测点4和测点10到测点1的传递路径导纳也远小于其他测点到测点1的传递路径导纳,同时由于测点5、测点6、测点11、测点12距离测点1更远,因此测点4~测点6、测点10~测点12对测点1的激励贡献可以忽略,对测点2、测点3进行分析,可以得到同样的结论,因此在反推测点1~测点3、测点7~测点9的激励力时,可以忽略测点4~测点6、测点10~测点12的激励贡献,但要考虑测点1~测点3、测点7~测点9的自激励贡献以及螺旋桨脉动激励贡献,而反推测点4~测点6激励力时,仅需考虑螺旋桨脉动激励贡献和测点4~测点6自激励贡献。令:Un为基座机脚处振动速度;Tn为机脚处垂向激励;Mmn为螺旋桨脉动激励区域到主机基座的传递路径导纳;Hmn为主机基座之间的传递路径导纳,因此可得式(14)

(14)
通过式(14)可计算得出测点1、测点2、测点3、测点7、测点8、测点9的激振力为
而测点4、测点5、测点6和测点10、测点11、测点12的激振力分别为
为简化处理,令
(18)
(19)
式中:TAC为主机A和主机C的激励力;TBD为主机B和主机D的激励力。基于MATLAB软件进行数值计算后,得到TAC和TBD的频谱图如图18所示。

图18 主机激励力Fig.18 The main engines excited force
2.3 激励力验证
为验证激励力的准确性,将螺旋桨脉动激励力和主机激励施加在有限元模型上进行频谱分析,选取四个距离激励源较近的区域:二层甲板-洗衣房,二层甲板-船员室,三层甲板-船艉储藏室,四层甲板-乘客舱室,将这四个区域的仿真分析结果与测试结果进行对比,对比结果如图19~图22所示。由图可以看出,仿真曲线与测试曲线变化趋势一致,振动速度有效值对比如表2所示,误差最大为21%,满足工程精度要求。但是仍然存在一定误差,引起这个误差的原因主要来自两个方面:①有限元模型中省去了敷料、舾装、内装等构件,如四层甲板-乘客舱室内有浮动底板、内饰隔板等构件,在一定程度上影响了传递路径导纳;②实际测量中,邮轮还受到风浪、泵、舵机、风机等激励的影响,如三层甲板-船艉储藏室,受到邻舱的空压机影响,因此相对其他区域,误差较大。

表2 舱室振动速度有效值的仿真与测试的对比Tab.1 The comparison between the affective value of vibration velocity of simulation and test
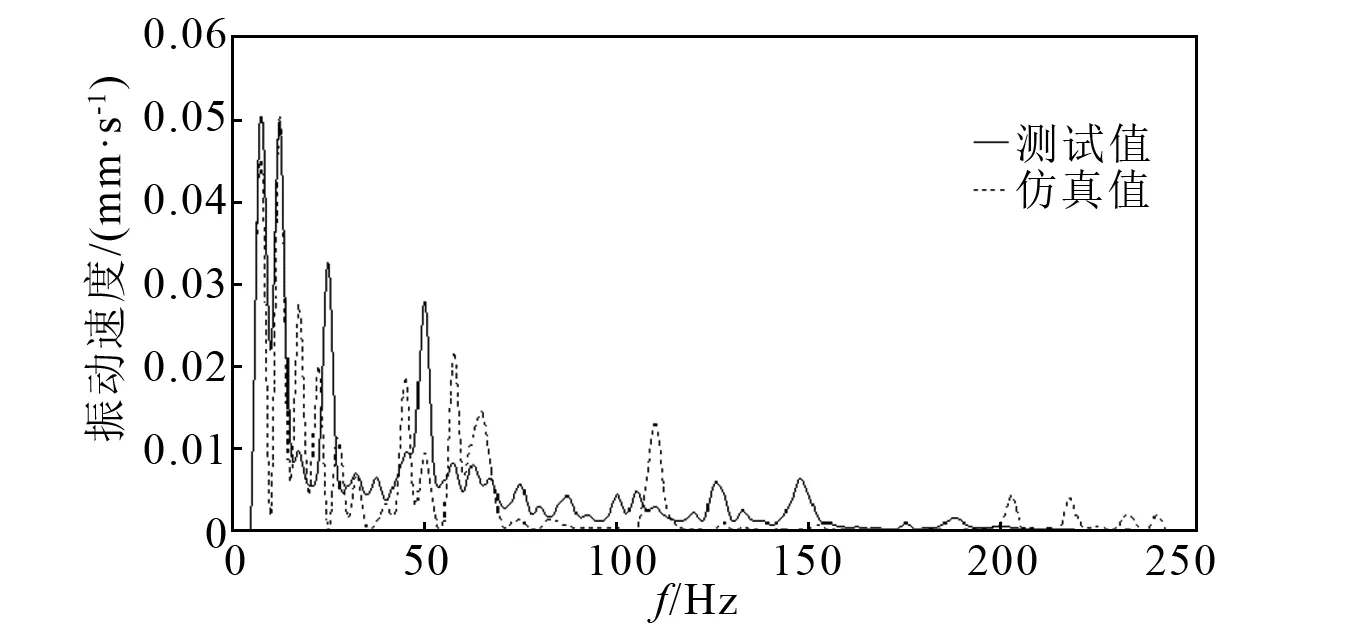
图19 二层甲板-洗衣房Fig.19 The laundry room in deck 2

图20 二层甲板-船员室Fig.20 The crew room in deck 3
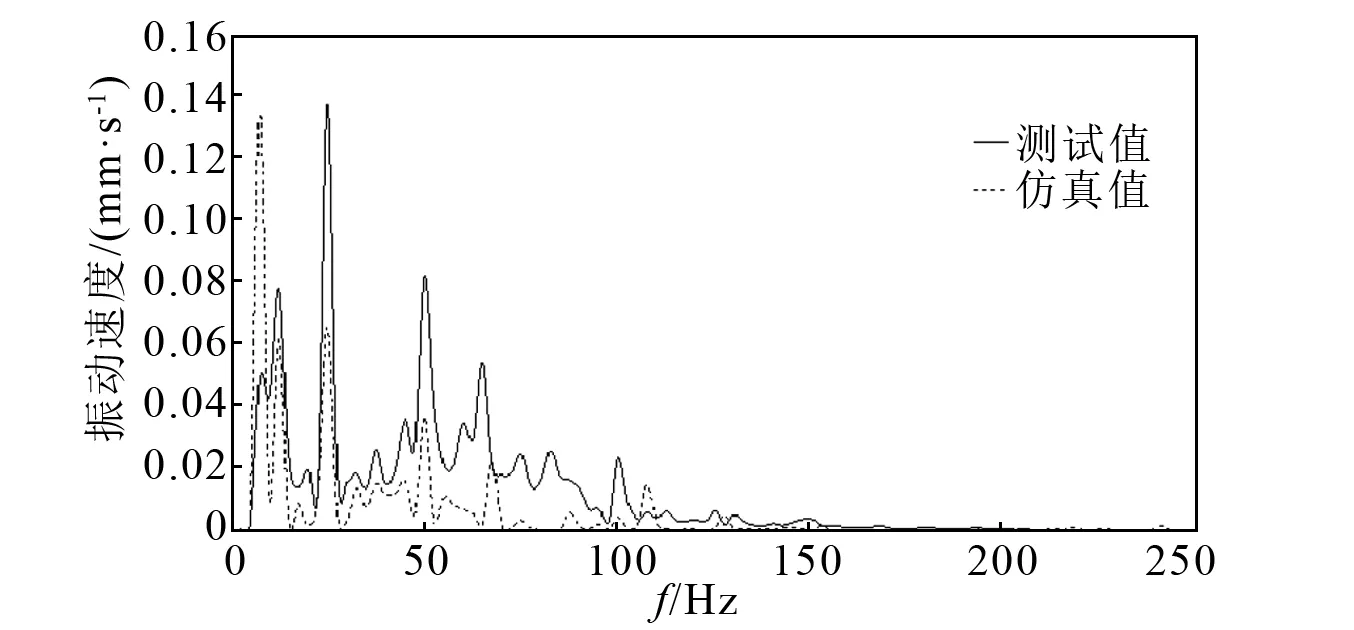
图21 三层甲板-船艉储藏室Fig.21 The outdoor area in stern in deck 3

图22 四层甲板-乘客舱室Fig.22 The passenger room in deck 4
3 振源贡献率分析
贡献量分析中,一般用下式计算各载荷所对应路径在目标点的振动贡献量。
即各个激励源分别对系统产生的响应。将螺旋桨脉动激励和主机激励分别单独加载在新型极地探险邮轮有限元模型上并进行频响分析。选取典型舱室,将螺旋桨脉动激励和主机激励对这些舱室的响应贡献进行对比,如表3所示。由表可知:二、三层甲板的舱室中,除去洗衣房位于主机舱的正上方,因此主机激励贡献占比较大,其他舱室螺旋桨激励贡献占比较大;四层甲板的两个舱室位置都处于艉部,因此螺旋桨激励贡献占比较大;五层甲板的两个舱室都位于主机舱室正上方的位置,而距离艉部较远,因此主机激励贡献占比较大;六、七层甲板的舱室中,健身房位于主机舱正上方位置,主机激励贡献占比较大,而其他三个舱室距离距离两个激励源都较远,螺旋桨激励贡献占比较大。通过以上分析可知,对于新型极地探险邮轮,激励源对舱室响应的贡献占比与舱室、激励源之间的相对位置有关,当舱室位于某激励源邻舱或正上方位置时,该激励源对舱室响应的贡献占比较大,当舱室距离两个激励源都较远时,螺旋桨激励贡献占比较大,这是由于螺旋桨激励产生的低频弯曲波损耗较小,更易于传播。

表3 典型舱室响应有效值的激励源贡献对比Tab.3 The comparison of the excited sources contribution to the affective value of classic cabin response
4 结 论
100 m新型极地探险邮轮为国内首制的X-BOW型的极地探险邮轮,国内暂时没有对该船型的振动研究,本文对母型船进行了振动特性和激励力贡献研究,为后期制造的同类型船提供设计参考。
(1)在同类型船的初期设计工作中,需要进行振动评估和设备选型工作。本文建立了100 m新型极地探险邮轮的有限元模型,并严格按照母型船的质量重心报告和内饰质量数据,调整模型的附加质量和重心。基于虚质量法,分析了新型极地探险邮轮的整船湿模态,并计算了主要激励源的激励主频,将整船模态共振频率与激励主频对比,初步验证整船没有共振危险,也为同类型船的前期振动评估工作以及设备选型提供参考。
(2)船舶的激励力获取比较困难,尤其是螺旋脉动激励,计算理论复杂,实验成本高,对船厂工作者很不友好。本文基于传递路径分析原理,测试了螺旋桨上方船底板和主机基座处的振动速度,同时利用新型极地探险邮轮的有限元模型计算得出激励点到振动速度测点的传递路径导纳,并分析了各个激励源之间的相干性,反推出螺旋桨脉动激励和主机激励,并将两种激励源加载在有限元模型中进行频响分析,得出各个舱室的振动响应,并选择四个距离激励源较近的舱室,将这四个舱室振动响应的仿真值与测试值对比,频响曲线趋势基本一致,振动响应有效值误差在21%以内,满足工程进度要求,验证了螺旋桨脉动激励和主机激励的准确性。同时该激励力可用于同类型船的振动分析工作中,为同类型船的详细设计提供参考。
(3)在振动控制阶段,需要分别对各类激励源采取由针对性的控制,因此需要获取各个激励源分别对舱室房间的贡献量,才能提出有针对性的控制方案。
分别将两种激励力分单独加载在有限元模型上,并进行频响分析,选择12个典型舱室,分析这两种激励对各个舱室响应的贡献,发现激励源对舱室响应的贡献占比与舱室、激励源之间的相对位置有关,当舱室位于某激励源邻舱或正上方位置时,该激励源对舱室响应的贡献占比较大,当舱室距离两个激励源都较远时,螺旋桨激励贡献占比较大,为同类型船的后期振动控制提供参考。
