Heterogeneous oceanographic exploration system based on USV and AUV:a survey of developments and challenges
2021-03-18XUHuixiJIANGChenglin
XU Huixi, JIANG Chenglin
(1 State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China;2 Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110016, China; 3 University of Chinese Academy of Sciences, Beijing 100049, China)
Abstract With sufficient literature retrieval and summery, this paper reviews the heterogeneous oceanographic exploration system based on the synergy of unmanned surface vehicle (USV) and multiple autonomous underwater vehicles (AUVs). Firstly, latest progress and achievements of heterogeneous oceanic exploration system are summarized and compared in terms of technical features and design ideas. In the following, research status of key technologies in coordinated control of the heterogeneous systems are elaborated. The task assignment, path planning and formation control are discussed in detail. Then the paper analyzes the technical problems of the exploration system from the aspects of external constraints from environment and hardware and the auxiliary technology of ocean exploration system. Finally, the future vision for the oceanographic exploration system is prospected based on the analysis of the current progress and actual requirements.
Keywords autonomous underwater vehicle (AUV);unmanned surface vehicle (USV);synergy;oceanographic exploration system;heterogeneous platform
With more and more disciplines focusing on the ocean such as geophysics, hydrothermal geochemistry, biogeography, and physical oceanography[1-2], the willing to explore the ocean have increased rapidly which have promoted the development of oceanographic exploration technology and equipment.
In the 21st century, many oceanographic exploration equipment has appeared in wake of the development in technology, e.g., human occupied vehicle (HOV), autonomous underwater vehicle (AUV), remotely operated vehicle (ROV) and glider as shown in Fig.1. Alvin (USA), Nautile (France), Shinkai6500 (Japan), Mir (Russia), and The Jiaolong (China) are all HOVs allowing a few individuals to descend into the deep ocean to gather the information and sample from the bottom. ROV is a tethered unmanned vehicle controlled directly by the remote operator and supported by the mother ship through the cable. AUV is an unmanned underwater equipment carrying onboard power and making decisions by itself without human intervention while performing the pre-defined tasks. Glider is a new kind of underwater vehicle of high efficiency and long endurance only with the limitation of sensors which can only gather the hydrological data and information, e.g., temperature, salinity, turbidity, oxygen content, and ocean current intensity. In comparison, AUV is free from the limitation of the cable and sensors, which can carry different sensors as required, e.g., side scan sonar (SSS), synthetic aperture sonar (SAS), sub-bottom profiler, and camera to gather detailed topographic and geomorphic acoustic information and high-resolution image data of the seabed[2]. Therefore, AUV is getting more and more attention now.
Over the last two decades, AUV have played increasingly important roles in both civil and military affairs. In the military field, AUV is widely used in the reconnaissance missions, minesweeping missions, and salvaging missions, etc. The United States Department of Defence (DoD) has issued a roadmap with clear strategic plan for the development of unmanned systems both in air, land, and sea which has been revised every few years since 2007[3]. In the other side, AUV also plays an important role in marine resource exploration[2], e.g., polymetallic nodules, seafloor massive sulphide and hydrothermal vents, general public mapping service, aviation and maritime insures described in Fig.2.
Although AUV can perform tasks by itself, it needs the locating service supported by the mother ship, which limits the scope and flexibility of the AUV. Except for the hardware limitations, the concomitant expense of ship-time is another key factor driving humans to develop new technology to replace the mother ship and cut down the expense.
The idea to eliminate the limitations and improve the AUV working efficiency is using unmanned surface vehicle (USV) to replace the mother ship to monitor the AUV[4]. Furthermore, the USV can also serve an information relay station between the AUV and the mother ship. Many research institutes and companies, e.g., SeaTrepid DeepSea and Ocean Infinity[5-7], Japan Agency for Marine-Earth Science and Technology Centre (JAMSTEC)[8], Hushcraft[9]and University of Lisbon[10], have adopted this idea to develop oceanic exploration systems.

Fig.1 Different oceanographic exploration device

Fig.2 Some discovered hydrothermal vents in the deep sea
In the following, these novel oceanographic exploration systems will be introduced detailly. After that, Comparison between these exploration systems will be made from different aspect in Section 2. And Section 3 will analyze the main technologies and challenges in this field. Finally, the Section 4 and 5 will make a future vision and conclusion for the oceanic exploration systems.
1 Unmanned oceanic exploration system
Most heterogeneous oceanic exploration systems are developed based on the idea of the synergy of USV and AUV for cutting down the expense and improve the working efficiency as shown in Fig.3. There are two different patterns of USV-AUV synergy in the figure. A is made up of USV-AUV pair as shown in the dashed box. In each pair, USV tracks the AUV to provide positioning and communication service. The other pattern B is composed of an USV and a fleet of AUVs, in which the USV provides the positioning service for all the AUVs in the formation.

Fig.3 Different patterns of heterogenous explorationsystems based on synergy of USV and AUV
Unlike the air and ground multi-vehicle systems, this system is used in the underwater environment which cannot be implemented easily. Despite years of research and development, only several projects made significant breakthroughs and only one has been commercialized.
1.1 Ocean Infinity and SeaTrepid DeepSea
Inspired by the behavior of fish school, Ocean Infinity proposes an approach to wide area survey oceanic exploration system by using a fleet of USV-AUV pairs for high resolution seabed data collecting and underwater targets searching as the pattern B in Fig.3[7].
As shown in Fig.4, the whole system is made up of a single host surface vessel (HSV) and a fleet of USV-AUV pairs. The famous multi-purpose offshore vessel Seabed Constructor is used as HSV for the fleet, and the commercialized HUGIN series AUV is adopted as the AUV[11-12]. Furthermore, Ocean Infinity designed a new USV for achieving the system and the specification is shown in Table 1. By pairing the AUV and USV one by one, their operational range can be extended even further. Each AUV communicates only with the paired USV via underwater high precision acoustic positioning (HiPAP) system. Whilst the USVs communicate with the HSV via radio links. By this way, USV can track the AUV and communicate with HSV separately as an information relay station between HSV and AUV.

Fig.4 Schematic of Ocean Infinity oceanographicexploration system

Table 1 Specifications of USV
The system workflow is separated into deployment phase, mission phase and recovery phase. In the launch phase, the USV will be launched from the leeward side of the HSV by the slewing davit launch and recovery system (LARS) which uses the new designed cone and bullet latching system to lower the USV to the water surface as showed in Fig.5. Then, the AUV will be launched from the stinger launch and recovery system on the stern of the HSV. Once the AUVs and USVs are deployed, the AUV will shake hands with corresponding USV to confirm each other, then enter the mission phase. In the mission, the AUVs will act different underwater operations using different sensors depending on the mission requirements. The status data of AUV will be sent to the USV though USBL and the USV will transmit the data to HSV by Kongsberg marine broadband radio (MBR) which allows real time data monitoring during the mission. Commands can also back down to the AUV by reversing the data flow direction, such as changing the direction or terminating the mission. After the mission, AUVs and USVs will be recovered through the LARS and Stringer system. At this point, the whole workflow is completed.

Fig.5 Schematic of slewing davit launch and recoverysystem (LARS) for USVs launch and recovery
It is worth mentioning that Ocean Infinity is the only company has commercialized the idea so far. Up to now, Ocean Infinity has been invited to search for Malaysia Airline missing flight MH370, Korean tanker Stellar Daisy and Argentinian submarine. And Ocean Infinity managed to locate the wreck of the tanker Stellar Daisy and the submarine[6].
1.2 The Zipangu of the sea project
Japan has the world’s sixth largest area (including the territorial seas and exclusive economic zone (EEZ)) which is rich in marine mineral resource. For exploring these treasures, Japan has launched the Zipangu of the Sea Project[8]focusing on the next generation ocean resources exploration technology[13]as shown in Fig.6 supported by Japanese Cross-ministerial Strategic Innovation Promotion Program (SIP)[14].
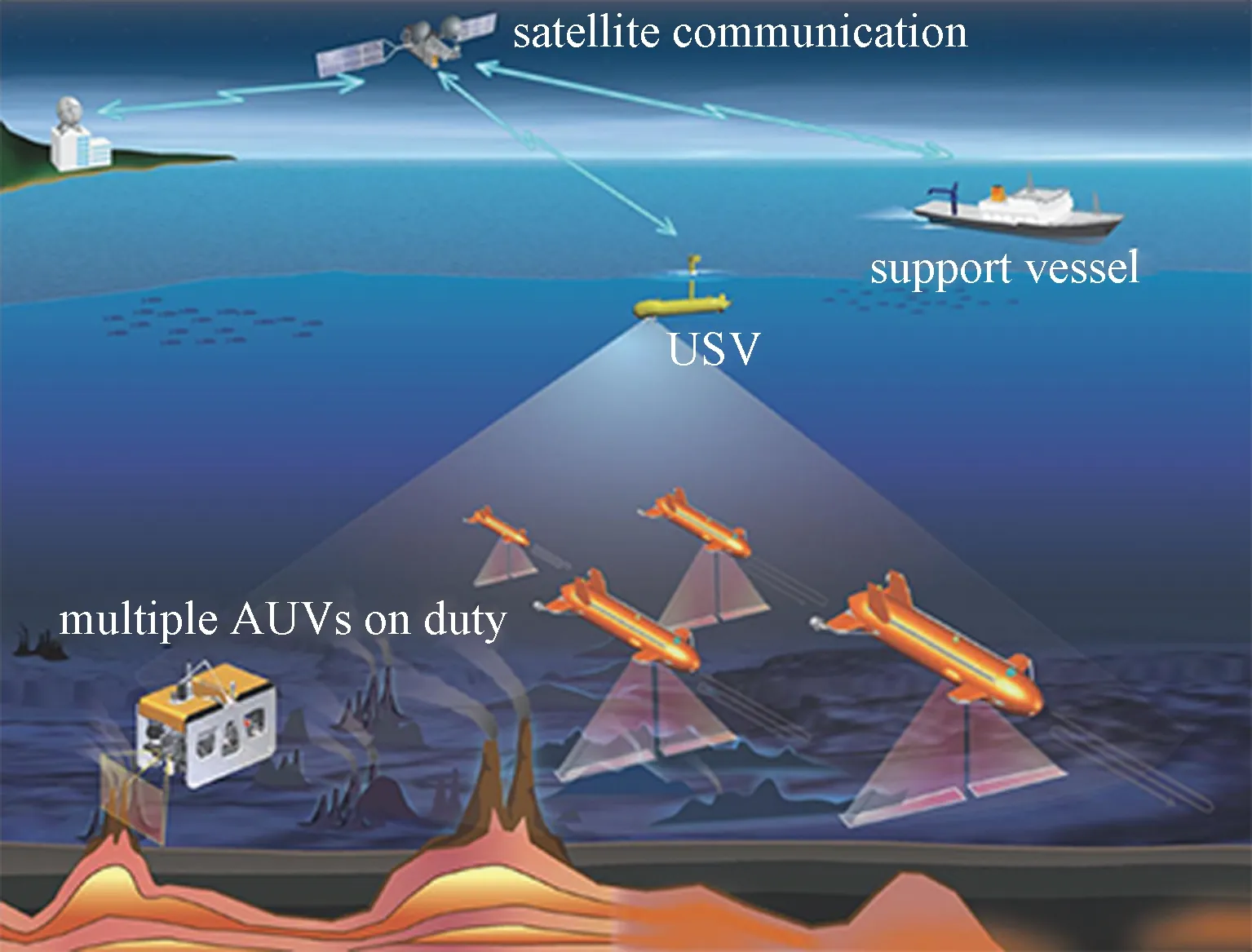
Fig.6 Schematic of the Zipangu of the sea project supported bycross-ministerial strategic innovation promotion program
Unlike the Ocean Infinity, this system is based on the idea of the pattern B. The whole project is made up of an USV[15-16], an AUV fleet, a new hovering AUV, and a new acoustic positioning system[17-18], etc.
The framework of this benthic exploration system consists of four parts: mother ship, USV, hovering AUV, and the AUV fleet as shown in the Fig.6. For achieving the project, two types of USV, “MAINAMI” and semi-submersible USV, a hovering AUV “Hobalin” and a cruising AUV “SIPAUV” were built under the project[19]as shown in Fig.7. Unlike the traditional USV “MAINAMI” (Fig.7(a)), a semi-submersible USV whose shape is similar to the cruising type AUV with an antenna named “sword” though the surface (Fig.7(b)) was designed as a surface relay station between the operator and the AUV fleet. Compared with traditional USV, the semi-submersible USV has an advantage in keeping the stabilization under surface waves and the specifications of two USVs are shown in the following Table 2. For hovering AUV “Hobalin” (Fig.7(c)), it was a newly designed 3 000 meters rated AUV for exploring seafloor hydrothermal deposits and relaying information which can locate at arbitrary depth avoiding the influence of the surface wave.

Fig.7 USVs and AUVs developed under theZipangu of the sea project

Table 2 Specifications of MAINAMI andsemi-submersible USV
The same with Ocean Infinity, the overall workflow can also be separated into three phases: deployment, mission, and recovery. In the first, the USV and AUVs are manually deployed by the A-frame crane or the derrick while the support system is under developing[8]. After all vehicles are lowered into the water, the cruising type AUVs and USV will sail to the meeting place for shaking hands to confirm with each other and then mission begins. In the mission, the AUVs will arrive in the appointed working place and scan the seafloor along the pre-defined route through the location information provided by the USBL installed under the USV until the mission done. While fleet is moving, the USV will track the fleet through the tracking strategy to keep distance with fleet. Furthermore, in case of losing the AUV, the missing AUV and other vehicles will both move to the predefined rendezvous point in the pre-defined route to confirm each other again. After finishing the task, the AUVs and USV will be recovered by the mother ship separately.
Up to now, although the entire project has not been achieved, some significant breakthroughs have been made. The newly developed AUVs and USV as well as the proposed tracking method have already been tested at the sea[20-21]. And the latest news from the official website of Zipangu Sea Project shows that four AUVs have been successfully navigated by one USV during the field trial in September 2017.
1.3 SEA-KIT
Three phases of long-term vision for the oceanic survey system through coordination of USV and AUV were put forward, autonomous tending, ridge segment scale (100 km) autonomous hydro-thermal exploration and basin scale (10 000 km) autonomous surveys, by German in 2012[5]. Nowadays, with the advent of the SEA-KIT, the vision will not be an envision anymore[22-23].
SEA-KIT is a newly designed USV by Hushcraft Ltd for an autonomous seafloor mapping system as shown in Fig.8. Unlike the USV proposed by company or institute above, the prototype of SEA-KIT is designed to operate with the 3 000 m-rated HUGIN AUV in the Shell Ocean Discovery XPRIZE[24]competition. The main components of this offshore mapping system are only the SEA-KIT and the commercialized HUGIN AUV carrying different sensors or equipment according to the requirement. And the basic specification of SEA-KIT is presented in Table 3.
As shown in Fig.9, there is a cavity in the middle hull of the SEA-KIT to store the AUV. Hence, unlike other USV which can only tend the AUV, SEA-KIT can also transport, deploy or recover the AUV by itself as the mother ship. Furthermore, there is another distinction comparing to the other USV that counting units of SEA-KIT endurance is days instead of hours. The performance of the SEA-KIT is shown in Table 4. In the meantime, SEA-KIT can also equip some sensors as a stand-alone surface moving exploration platform.

Fig.8 Overview of SEA-KIT mapping system

Table 3 Specifications of SEA-KIT

Fig.9 The SEA-KIT with AUV onboard
No need for the mother ship, SEA-KIT can transport the AUV between the pier and the mission location. After arriving at the location, the AUV will be deployed through the internal slipway homed in the stern of the SEA-KIT. And then, the AUV dives into the water to begin the mission while SEA-KIT operate approximately above it as a support platform providing the positioning information. During the mission, the USV also acts as a bridge between the AUV and the onshore operator through HOS (HUGIN operator system), POS (payload operation system), MBR (maritime broadband radio) and APOS (acoustic positioning operation system) which are responsible for mission controlling, state monitoring, acoustic data processing and data transmission respectively[24]. When the mission is completed, the AUV will be recovered through the low-friction and impact-safe slipway with the guidance of SEA-KIT. After entering the SEA-KIT, the AUV will recharge and exchange the data on aboard and SEA-KIT will take the AUV to the next mission location following the instructions from the operators.

Table 4 SEA-KIT Performance
This newly designed USV-AUV mapping system needs no intervention of human on site and is of great significant to lower the operation risk and expenditure. Furthermore, this mapping system won the first place in the XPRIZE competition and completed first ever international commercial uncrewed transit in 2019[9]. This system will revolutionize the oceanic exploration method and the envision will not be the idea anymore.
1.4 Other
In addition to those systems introduced above, there are many other systems based on the same idea of USV-AUV which are conducted by laboratories or universities. Unlike commercial oceanic exploration systems, these exploration technologies and systems are in the prototype or experimental phase or have the special application scenarios.
For example, the EC MORPH (marine robotic system of self-organizing, logically linked physical nodes) project supported by the European Community is focusing on developing the efficient underwater mapping system for the rugged terrain with full complexity, such as nearly vertical cliffs and negative slope wall scenario[25].
As shown in Fig.10, in the negative slope wall scenario, the system consists of spatially separated mobile robotic modules: surface mother ship (SSV), global navigation and communication vehicle (GCV), local navigation and sonar vehicle (LSV) and camera vehicle (C1V and C2V), which are equipped with different sensors[10,24]. The SSV operates as the USV on the surface for providing the global navigation for the AUV formation and GCV works under the water for maintaining the navigation and communication. As for the LSV and CV, they are carried with lookahead sonar and onboard camera for mapping terrain and getting high definition image respectively. During the mission, the GCV works as coordinator between the formation and SSV though acoustic signal. The LSV maps the terrain through the guidance from the GCV and the CVs follow behind the LSV to keep the formation to get the image data. To achieve the idea, a range-based formation control method was also proposed and the system was tested in Lisbon, Azores and Girona during the project[26].

Fig.10 MORPH formation in a negative-sloped wall scenario
Except for the MORPH project, there are many other systems based on the idea of coordination of USV and AUV, such as GREX project[27]. Furthermore, researchers from the University of Zagreb developed a heterogeneous robotics system consisting of USV, AUV and unmanned aerial vehicle (UAV) for oil spill survey to prevent the tragic like the Deepwater Horizon accident in the Gulf of Mexico in 2010[28-29]. And some researchers from Norwegian University of Science and Technology used an USV to track and monitor an AUV to carry out a survey about a short Sunderland type aircraft in the Trondheim fjord sunk in 1945[30].
Apart for those exploration systems, there are many other research institutions and universities carrying out the research in related technologies of USV-AUV heterogeneous system. Such as, the hydro acoustic communication system for the navigation and controlling of USV and AUVs proposed by the researchers from Russia Far Eastern Federal University and Institute for Marine Technology was tested in field[31]. The researcher from Shenyang Institute of Automation (SIA), Chinese Academy of Sciences put forward a tracking method for ASV tracking AUV and did the experiment on the lake[32]. Scholars from Florida Atlantic University designed an USV as a supporting platform for the AUV and UAV[33]. Although most of these technologies are in the prototype or experiment phase, there are still a lot can be learned from them.
2 Analysis and comparison
All those oceanic exploration systems above are based on the idea of the coordination of USV and AUV as shown in Fig.3. The systems proposed by Ocean Infinity, Zipangu Sea Project and SEA-KIT are the three representative systems. Ocean Infinity uses a fleet of multi-USV-AUV pairs based on the pattern A in Fig.3. And the Zipangu Sea Project adopts the method using one USV to navigate the AUV fleet to carry out the mission which is the pattern B in Fig.3. Unlike other systems, SEA-KIT is the unique one integrating the deployment and recovery devices into the USV to achieve a truly unmanned oceanic exploration system. The rest part of this section will analysis and compare these three systems from different aspects.
Due to Ocean Infinity is similar to the Zipangu Project, both two systems will be compared with SEA-KIT from the different aspect of performance, daily cost, flexibility and so on, as shown in Fig.11.

Fig.11 Comparison between Ocean Infinity,Zipangu Project and SEA-KIT
The most obvious difference between the three systems is that SEA-KIT does not need the mother ship during the mission, which can reduce the operating cost and improve the staff safety significantly. But since there is no need for mother ship, the operation range is limited and the operation risk is increasing while there is no human intervention on the site for the urgent system problem. As for the performance, there is no doubt that Ocean Infinity is the distinctive one which have a fleet up to eight AUVs working in the same time, while Zipangu Project can only operate four AUVs at most and SEA-KIT have the only one. And Ocean Infinity fleet can be separated into USV-AUV pairs to conduct different tasks which improves the flexibility significantly unlike the Zipangu Project that all the AUVs are navigated by one USV and can only move within the limited area. Furthermore, SEA-KIT can only carry specific shape AUV due to the structure design while there is no limitation for both other two systems.
The similarity of both three systems is all of them are limited by the sea condition, but the SEA-KIT can adjust to the light duty pattern saving the cost and energy while the other can only wait in the deck on the ship until sea condition gets better. In short, although the Zipangu and SEA-KIT is still under developing, SEA-KIT is the ideal solution for the inshore oceanic exploration and Ocean Infinity suits for the extensive ocean survey while Zipangu Project is good at concentrated sea area resource survey. But needless to say, using synergy of USV and AUV to replace mother ship is a disruptive progress for oceanic exploration comparing to the traditional oceanic exploration system.
3 Main technologies and problems in USV-AUV oceanic exploration system
In recent years, developing oceanic exploration system based on the coordination of USV and AUV is definitely a hot spot in the field of underwater exploration technologies. These oceanographic exploration systems are not specific technologies or methods, but a collection of them. Many technologies are evolved from the aerial or ground multiple vehicle systems which cannot be used directly and need to be modified due to the different operating environment characteristics[34-37]. Therefore, the following part will elaborate and analysis the main technologies and problems in oceanographic exploration systems as shown in Fig.12.

Fig.12 Main technologies and problems in USV-AUV oceanographic exploration system
3.1 Synergy and intelligence
Synergy and intelligence are two terms frequently used to describe the oceanographic exploration systems. But it has to be said that the synergy and intelligence of current oceanic exploration systems can only replace or alleviate the human work to a certain extent, such as autonomous tending, state monitoring and information relaying.
From the view of system structure shown in Fig.3, the technical problem of the system lies in the synergy, which can be divided into heterogenous synergy between USV-AUV and homogenous synergy between AUVs.
For the heterogenous synergy, many institutions and universities have carried out the research in this field. For example, JAMESTC[20]and SIA[32]designed tracking control algorithm for USV tracking AUV, Hu et al.[38]came up with a cooperative navigation and control for the synergy of surface and underwater autonomous marine vehicles. Jan and Saab made an investigation for the hybrid platform[39]. Apart for the USV-AUV system, Lyu et al.[40]and Jung et al.[41]did some research of synergy of USV and ROV. Moreover, Wu[42]conceived a synergy system of autonomous aerial-aquatic vehicle (UAAV) and AUV.
Another part is the homogeneous synergy between AUVs such as formation control and cooperative hunting control. For formation control, there are many relatively mature methods such as leader-follower method[43-44], virtual structure methods[45-46], artificial potential methods[47-49]and behavior-based methods[50-52]. Except for that, the MORPH project put up forward the range-based formation control method to achieve sailing in formation[53]and in ASAP project, Leonard et al.[54]conducted research in multi-vehicle formation control based on information consistency, etc.
Compared with multi-AUV formation control, cooperative hunting is the higher embodiment of synergy. Many scholars came up with the corresponding hunting control algorithm. Zhu et al.[55-57]did many researches in this aspect by using the bio-inspired neurodynamic and dynamic prediction for trajectories of target. And Jia et al.[58]designed a cooperative target search method based on the prediction of initial target information. However, due to the high cost and requirements of experiment hardware and great environment uncertainty, most of the methods or strategies mentioned above are still in the simulation stage on the laboratory, and are not tested in the actual experiments.
The core of intelligence lies in the decision-making, which does not only refer to the self-protection decision in the emergency conditions but also to the decisions of task allocation and path planning between the vehicles, made by the system itself according to the mission and the vehicle states. In other words, all the current systems are moving and scanning along the routes pre-defined before the system lowered into water. How to reduce human intervention and transplant the decision-making ability to the system is the core problem in the oceanic exploration system development.
Although, these multi-vehicles systems have not achieved complete intelligence so far, many methods and strategies for task assignment and path planning have been proposed for the systems. As far as task assignment is concerned, Smith[59]put forward Contract Net model as early as 1980; Then Brain and Maja[60]came up with behavior-based task allocation method; Zhu and Yang[61]conceived a task allocation approach using neural network; And now a new method based on the game theory was proposed by Dai et al.[62].
As for path planning, lawnmower search path is still the main search route in the practical application scenario. Many researchers proposed the corresponding search strategies for the future scenarios of underwater target search, such as a special search trajectory proposed by Bagnitckii et al.[63]for the static target; Li et al.[64]conceived a planning method under specific scenario; Zhu et al.[65]designed the task allocation and path planning method with considering the initial environment information. How to embed these methods and strategies into the system to realize the task allocation, path planning and relationship maintenance by system itself in real environment are the core problems faced by researchers all the time.
3.2 Environment and hardware limitation
Different from terrestrial or aerial multiple vehicle systems, the oceanographic exploration systems run in an extreme environment with darkness, low temperature, high pressure, corrosion and unpredicted current. Even the USV working on the surface are also impacted by the waves. The requirements for structure design and manufacturing material of the vehicles have been greatly improved owing to the unique environment characteristics. However, the most serious problem is the only one way to transmit the information under water is through the acoustic signal due to the attenuation of the electromagnetic under the water, which significantly reduces the communication ability between the system[66]. The other challenge is the unpredicted current, which can influence the stability overall the system during the operation. For that, many scholars have proposed new methods and models to eliminate and optimize the impact of currents as far as possible[67-68]. Those environment constraints mentioned above are the fundamental factors effecting the overall system.
The energy, sensors, communication and navigation devices on the AUV are the direct factors constrain the whole system working performance. Energy and sensors directly determine the operating range of the system and the working ability while communication and navigation are related to whether the AUV can reach the operation spot and travel along the predefined route accurately under the water. Since the birth of AUV, researchers have been working to improve the limitations of those factors, such as developing new energy resources, materials and sensors[69-70]. Furthermore, researchers are also trying to develop new kind of long-range AUVs[71]. And different from the fact that temperature and water pressure will decrease or increase regularly with depth increasing, the propagation speed of acoustic signal in the water also affected by temperature, salinity and other factors which will result in refraction and interference. In view of this problems, some scholars have also proposed corresponding processing algorithms for optimizing[72]. Although many problems have not been solved so far, all these methods and technologies will be improved with the development of interdisciplinary research and computer science.
3.3 Auxiliary technology
The oceanographic exploration system is a huge project consisting of many parts, which has a Bucket effect. It is not an ideal method to improve the system performance and efficiency by designing the new USV or AUV. Only by improving and optimizing all the aspect of the system can the operation performance and efficiency be improved significantly while avoiding the Bucket effect.
There are many aspects can be improved except for the environment and hardware problem mentioned above, such as the deployment and recovery problem for USV and AUV, how to prolong the system operating time and accelerate the data processing speed, how to eliminate the impact from the surface sea waves and so on. For solving these problems, researchers put forward the corresponding optimization devices and schemes, for instance, the fast and convenient supporting deployment and recovery system for improving the working efficiency[7-8,73-74], underwater charging station for prolonging the system operating hours[75], reliability index for evaluating the system performance[76], new on-board data processing algorithm for accelerating the data processing speed, motion compensator for eliminating the surface sea waves impact to acoustic devices on USV[77]even developing new working-AUV for making up the disadvantage that AUV can only carry out a survey[78].
Furthermore, the commercial exploration systems developed by Ocean Infinity, Zipangu Project and Hushcraft have also developed professional acoustic image processing systems and industry evaluation standards to improve the operating efficiency and user experiences. And except for these mentioned aspects, there are many other technologies under developing are not mentioned in this section due to the limitation of article length.
4 Future vision for oceanographic exploration system
As mentioned above, compared to the ground or aerial multiple vehicle systems, the development of underwater multiple vehicle system is relatively lagging behind due to the complexity and particularity of its operating environments. There are still many hypotheses and ideas based on theoretical research and simulation in laboratory without the actual experiments. However, it is worth affirming that many achievements and progress have been made in this research field. According to the main technologies and problems analysed in previous section, the long-term vision for oceanic exploration system spans three phases with increasing time and complexity: polishing stage, inshore survey stage and oceanic operating stage.
Firstly, in the following time, the oceanographic exploration system will be in a polishing stage. The systems based on the existing multi-vehicle systems or prototypes will be improved from all the aspect such as developing the supporting facilities, enhancing operating ability, improving the data processing speed and system stability. Finally, it will establish the oceanic exploration system industry and industrial standard to promote its commercialization.
At the second stage, an unmanned long-term active inshore survey system will be established. Special inshore docks and stations will be built for USVs and AUVs maintenance such as energy supplement, data transmission and recondition. The multi-vehicle system will also exchange the information with the fleet of other vehicles such as Gliders. If the collected data is unnormal, the offshore investigation system will drive to the target location to conduct an investigation automatically. And no mother ship or operator should be required throughout the whole working time.
Finally, the entire oceanic exploration system will no longer be limited to the synergy of USVs and AUVs. Instead, it will work with ROV, Glider and even UAV to establish a large scale heterogeneous oceanic exploration system with cross-regional synergy. And the operation capability of the system will not only be limited to the data collection such as floor mapping and picture taking, but has the ability to operate at any depth on global scale. In this way, it can be regarded as a real unmanned oceanic exploration system.
5 Conclusion
Using AUV to replace the traditional oceanic survey method was a disruptive technology as a “Paradigm Shift” in marine exploration history. Nowadays, it is another “Paradigm Shift” in this field by using USV to cooperate with AUV to replace the mother ship. In this paper, we introduce, analysis and summarize the information of the state-of-the-art oceanic exploration system based on the synergy of USV and AUV. Although great progress has been made in this field, there are still many problems and challenges for the researchers.
