激光追踪测量系统机械结构动力学建模方法
2021-03-11李长亮陈洪芳孙若水
李长亮, 陈洪芳, 孙若水
(北京工业大学 北京市精密测控技术与仪器工程技术研究中心,北京 100124)
随着现代工业技术的发展,大型工件检测、计算机辅助设计(CAD)对比测量、机器人校准等领域对测量的精度、范围和实时性等方面都提出了更高的要求,激光精密跟踪测量技术发挥着越来越重要的作用[1-3]。激光追踪测量系统具有高精度、高效率、无接触动态测量等优点,被广泛应用于现代工业机床的在线校准、精密机构的装配和工业产品的合格性检测等方面。国外对激光追踪测量技术的研究较为成熟,美国的Chesapeake公司研制了CMS-1000型六站距离交会激光跟踪测量系统,测量精度达到了7~70 μm[4]。2005年德国国家计量研究院和英国国家物理实验室联合研发了一台高精度的激光追踪仪,此后,德国Etalon公司推出了Laser Tracer-NG激光追踪仪,Laser Tracer-NG追踪半径在0.2~15 m范围内,追踪速度可达600 mm/s,测距分辨力为0.001 μm[1]。国内常放等[5]提出了一种基于WinCE的目标跟踪控制系统,利用GPS模块获取目标方位,实现了跟踪功能。2016年董登峰等[6]研究了激光跟踪仪的跟踪伺服控制系统并给出了总体设计方案,将角度测量精度提高到1.5″,可实现的最远跟踪距离不小于41.7 m。2017年张东坡等[7]设计了基于视觉伺服的目标跟踪控制系统,实现对特定颜色目标的实时跟踪控制,粗跟踪精度可达38×10-6rad[8]。目前,我国高端测量的精密仪器研发基础仍然十分薄弱,激光追踪测量技术发展迟缓,国内科研和商用的激光追踪设备还主要依赖进口,特别是高精度、高检测速度、高经济性的追踪仪已经成为制约我国一系列重大装备研制的瓶颈问题[9-12]。
本文提出一种基于激光追踪测量系统机械结构的动力学建模分析方法,将拉格朗日动力学分析方法引入到激光追踪测量系统机械结构设计分析中,为机械结构的设计改进和电机的精确选型提供了建议。
1 激光追踪测量系统机械结构模型简化
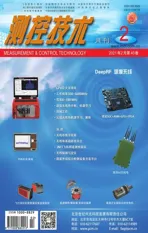
激光追踪测量系统选用位置固定且不参与运动的标准球作为反射机构,不涉及角度测量,将误差源引入减少到最少,提高了空间追踪测量的效率和精度。激光追踪测量系统主要由机械结构、伺服控制系统、光路系统和信号采集系统四大部分组成。机械结构作为激光追踪测量系统的关键部件之一,是激光追踪测量系统的基础,也是激光追踪测量系统的执行结构。其主要由底座、两个精密转轴轴系和两个伺服减速电机、光学系统支撑板和光学元件以及标准球调节座组成。其机械结构的性能和动态特性以及机械结构的参数都会影响测量系统的准确度和精确度[12]。运用拉格朗日分析力学的方法研究其动态特性,在设计开发中对激光追踪测量系统机械结构进行建模分析。
对完整激光追踪测量系统进行动力学和力学分析的过程较为复杂,也存在很多影响较小但处理复杂的部件,通常应对其完整模型进行简化处理。图1为激光追踪测量系统机械结构的完整模型,图2为激光追踪测量系统机械结构的简化模型。
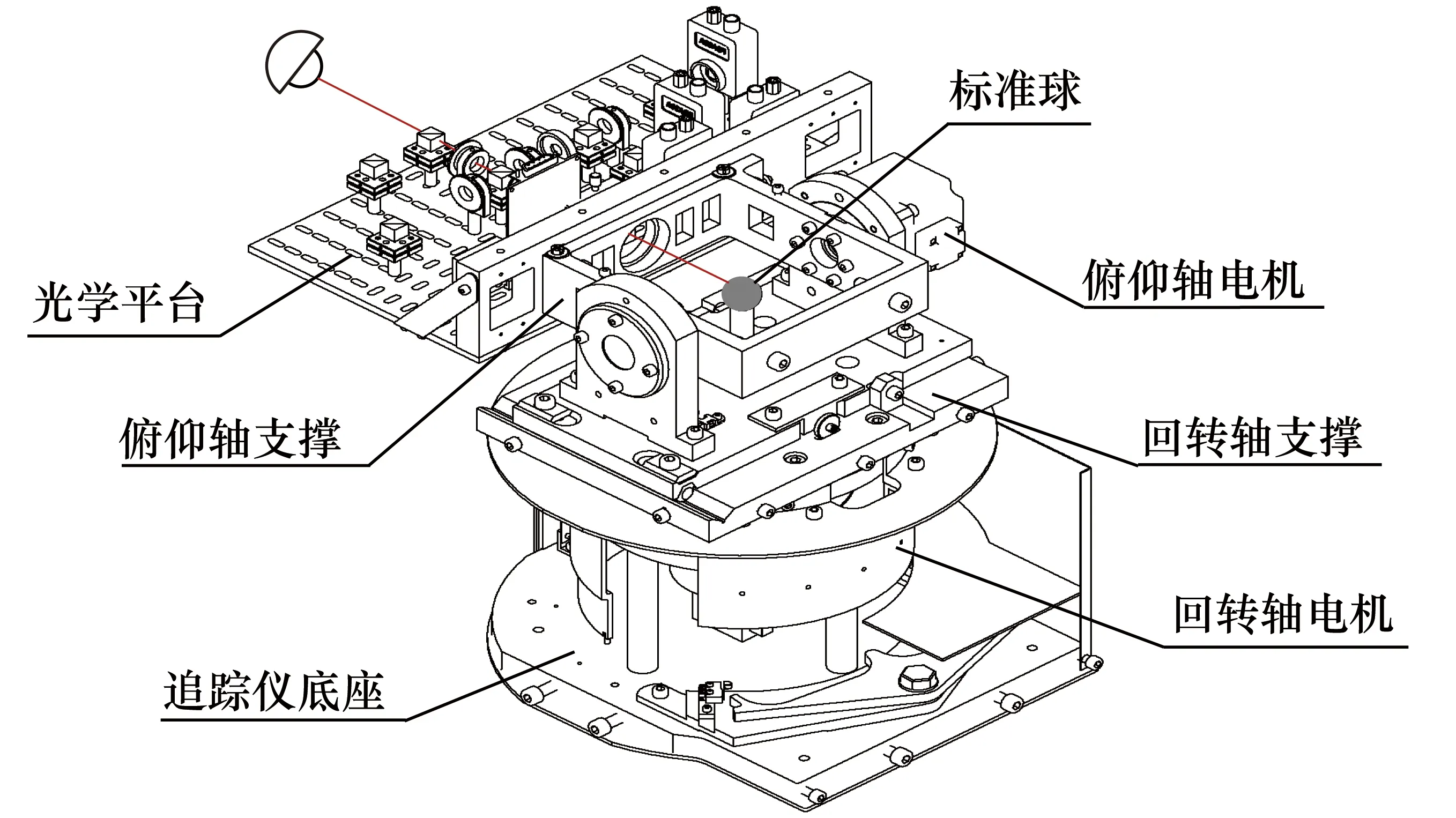
图1 激光追踪测量系统机械结构完整模型

图2 激光追踪测量系统机械结构简化模型
由于低阶模态对结构的性能影响较大,选取第1~6阶固有频率进行研究,通过ANSYS Workbench进行模态分析,得到完整和简化模型前6阶固有频率的结果如表1所示。
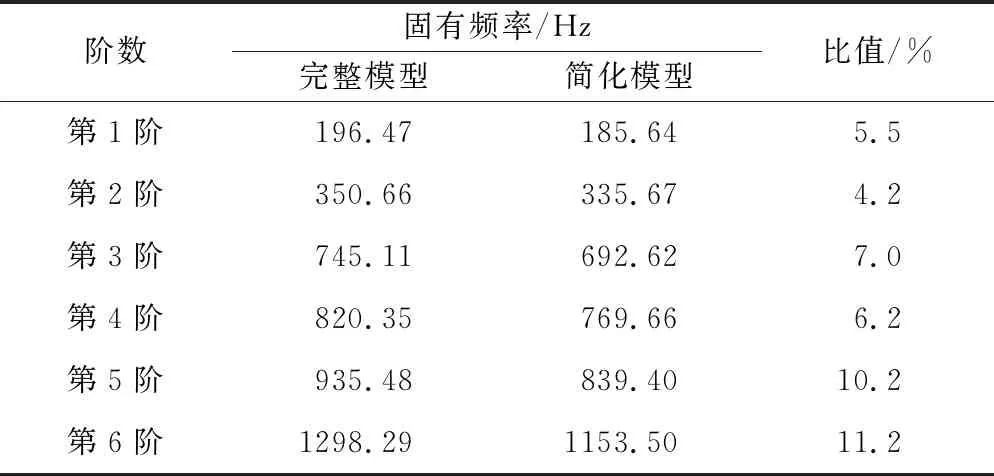
表1 前6阶固有频率对比
对完整模型和简化模型进行振动频率对比分析,如图3所示,得到固有频率的最大差异为11.2%,模型简化处理在合理范围内。
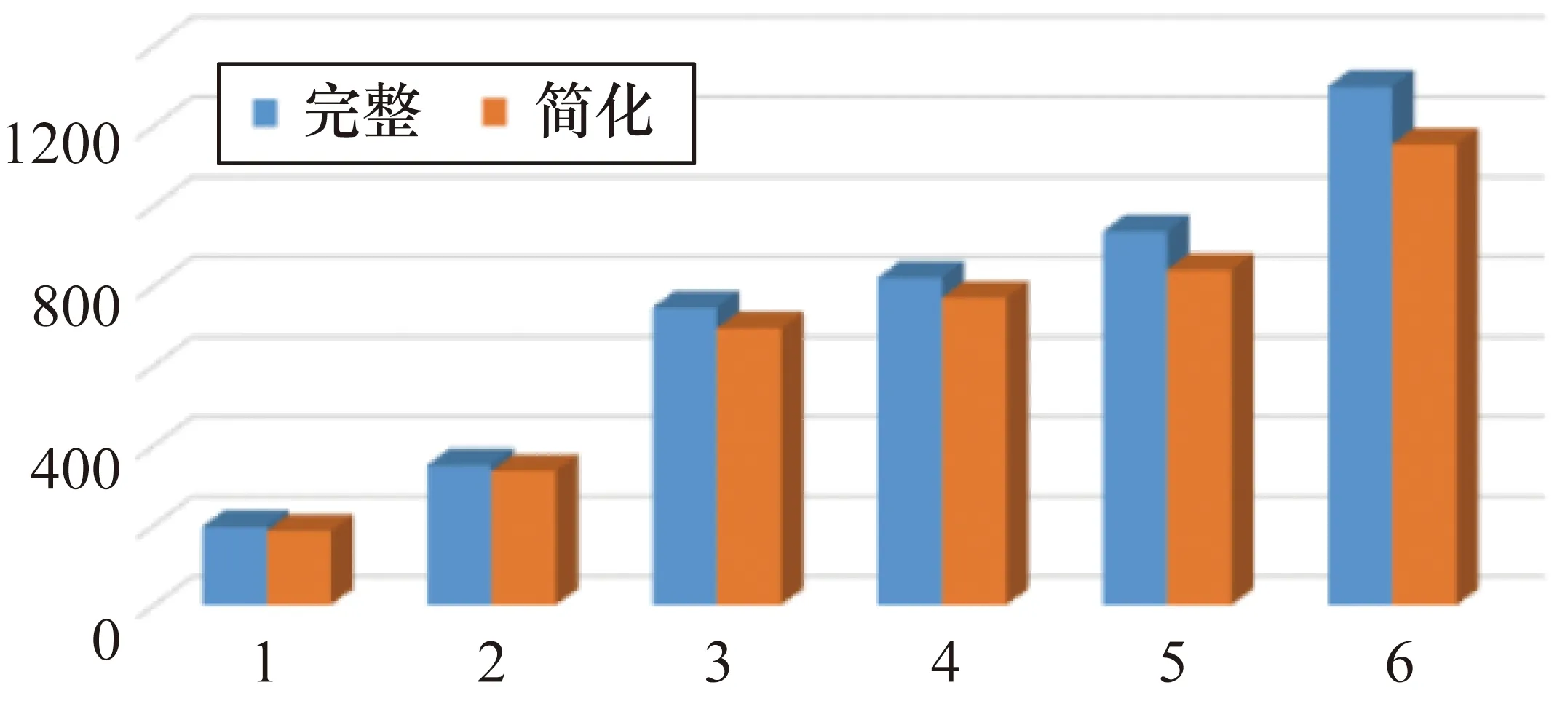
图3 完整模型和简化模型前6阶振动频率对比
2 系统机械结构的动力学建模
对激光测量系统机械结构进行动力学建模分析,分别考虑理想情况下和引入误差项的非理想情况下的模型,对研究在运动过程中的关节电机力与力矩变化具有重要意义。
2.1 拉格朗日-欧拉动力学建模基础
拉格朗日基于牛顿欧拉法创造了分析力学,其依赖广义坐标和功能原理,不包含所有不做功的力和内部相互作用的力,把整个系统的动力学问题描述成一个封闭的数学表达式,其一般形式为
(1)
式中,qi为广义坐标;T为动能;θj为广义力。
拉格朗日方法具有较强的理论性和逻辑性,表示系统较简洁。
拉格朗日函数被定义为系统的动能K和势能P之差,即
L=K-P
(2)
K和P可以用任何方便的坐标系来表示。由拉格朗日函数所描述的拉格朗日-欧拉动力学方程[13]为
(3)

对于具有完整约束的两自由度系统,可以得到两个拉格朗日方程组。
2.2 激光追踪测量系统机械结构理想动力学模型建立
对激光追踪测量系统机械结构进行理想情况下的建模分析,不考虑结构参数误差研究其动态特性。
2.2.1 激光追踪测量系统机械结构理想D-H数学模型
建立机械结构的D-H数学模型为拉格朗日-欧拉动力学建模打基础。
理想激光追踪测量系统机械结构D-H模型的坐标系示意图图4所示。
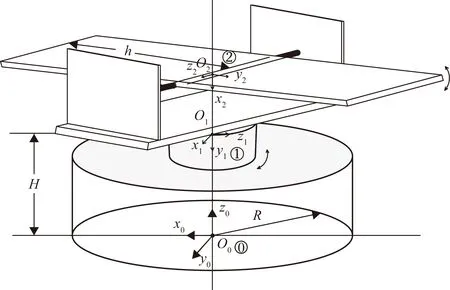
图4 理想情况机械结构的D-H模型坐标系统
机械系统的坐标系广泛采用直角坐标系,理想情况下回转轴和俯仰轴交汇于一点,这一点在标准球的中心,按照D-H数学模型的建系规则建立如图4所示的坐标系统。表2为理想激光追踪测量系统机械结构的坐标系分配。

表2 机械结构D-H模型的坐标系分配
可以得到激光追踪测量系统机械结构D-H模型的齐次变换矩阵为
(4)
(5)
(6)
式中,C1=cosθ1,S1=sinθ1,C2=cosθ2,S2=sinθ2。
式(6)为激光追踪测量系统机械结构理想情况的D-H数学模型。
2.2.2 激光追踪测量系统机械结构理想动力学模型
不考虑结构参数引入的误差项建立机械结构的动力学模型。
根据两自由度机械结构的动力学方程封闭形式:

(7)
两自由度惯性加速度相关的系统矩阵为
(8)
(9)
(10)
式中,J1,J2为回转轴和俯仰轴的惯性矩矩阵。
U11=Q10A1
U21=Q10A2
U22=0A1Q21A2
式中,Qi,i=1,2为广义坐标点。
激光追踪测量系统两个牵引轴的惯性矩为
(11)
(12)
式中,R为回转轴电机驱动的上部构件的理想回转半径;m1为回转轴电机驱动的上部构件的总质量;r为俯仰轴运动的俯仰旋转半径;m2为俯仰电机带动做俯仰运动的构件总质量。
科里奥利力项和离心项如下:

(13)

(14)
式中不同项的系数为
(15)
在激光追踪测量系统进行目标追踪的过程中没有机械结构的平移运动只有旋转运动,系统的动能只包括旋转部分,因此无须考虑势能的变化。
结合式(7)~式(10)和式(13)~式(14),得到激光追踪测量系统机械结构理想情况拉格朗日-欧拉动力学模型为

τ1τ2 =12m1R2+12m2r2S220012m2r2 θ··1θ··2 +
(16)
式中,τ1,τ2分别为回转轴和俯仰轴的关节力矩。旋转关节空间的动力学方程反映了关节力矩与关节变量、运动速度和加速度之间的函数关系,将力与运动结合在一起。
2.2.3 理想机械结构动力学模型的冗余项分析

实际上,俯仰角θ2是由俯仰轴控制电机带动跟踪光学系统的旋转角,其取值范围在-15°~85°,可对S2C2构造函数求极值。在实际的追踪过程及大多数的应用中,激光追踪测量系统的追踪速度相对较慢,设其跟踪速度为0.03 rad/s。激光追踪测量系统机械结构的工作参数如表3所示。

表3 激光追踪测量系统机械机构的实际工作参数
基于上述激光追踪测量系统实际工作参数,当激光追踪测量系统在较低速度下工作时,理想动力学方程中的科里奥利力项和离心力项都远小于第一项,因此在实际工作的情况下可以忽略不计。所以激光追踪测量系统的机械结构理想的拉格朗日-欧拉动力学模型可以简化为

τ1τ2 =12m1R20012m2r2 θ··1θ··2
(17)
可以看出,激光追踪测量系统机械结构的理想动力学模型在实际工作情况下较为简单,加速度参数对关节力的影响最大,在电机启动时回转轴和俯仰轴的力矩瞬间达到最大值,与实际情况相符。
2.3 激光追踪测量系统机械结构非理想动力学模型建立
对激光追踪测量系统机械结构进行非理想情况下的建模分析,考虑结构参数误差研究其动态特性。
2.3.1 激光追踪测量系统机械结构非理想D-H数学模型
任何机械结构都存在一定的非理想情况,激光追踪测量系统机械结构的非理想情况主要指机械构件与电机回转轴线存在的位置偏心和角度偏移,激光追踪测量系统机械结构的非理想D-H模型坐标系统示意图如图5所示。

图5 激光追踪测量系统机械结构的非理想D-H模型坐标系统
考虑到非理想情况下的机械结构可能存在的角度偏移和位置偏移误差,与理想情况不同,3个坐标系的原点不一定在电机的旋转轴线上,点o0,o1和o2分别表示坐标系o0-x0y0z0,o1-x1y1z1和o2-x2y2z2的原点。按照D-H建模规则建立图5所示的坐标系统,通过这种方式在模型中将角度偏移和位置偏移误差包含在模型内。非理想激光追踪测量系统机械结构的坐标系分配如表4所示。

表4 激光追踪测量系统机械结构非理想情况的坐标系统D-H模型参数
对于实际的情况,坐标系2所在的激光追踪测量系统光学平台用于安装追踪系统的光学元件,由于轴心偏移方向平行于俯仰运动的旋转轴,可忽略不计,位置偏移仅考虑底部回转轴电机与顶部俯仰轴电机所在的旋转轴线即可。可以得到Δθ2≈0和α2≈0。因此系统变换矩阵为
(18)
(19)
(20)
式中,C1=cosθ1,S1=sinθ1,Sα1=sinα1,C2=cosθ2,S2=sinθ2,Cα1=cosα1。
其中,式(20)为激光追踪测量系统机械结构非理想的D-H数学模型。
2.3.2 激光追踪测量系统机械结构非理想动力学模型
考虑激光追踪测量系统机械结构参数引入的误差项角度偏移和位置偏移,建立机械结构的非理想动力学模型。
惯性加速度相关的系统矩阵为
(21)
(22)
(23)
其中:

(24)
V12=a2[Sα1(a1C2+a2)+d2S2Cα1]
(25)
(26)
科里奥利力项和离心项如下:
(27)
(28)
式中,
(29)
F21=a2(d2Cα1C2-a1Sα1S2)
(30)
(31)
(32)
结合式(21)~式(23)、式(27)~式(28)和式(14),得到激光追踪测量系统机械结构非理想情况拉格朗日-欧拉动力学模型为

τ1τ2 =12[m1R2C2α1+m2r2(S2α1C22+S22)]+m2V1112m2r2Sα1+m2V1112m2r2Sα1+m2V1212m2r2+m2V22 θ··1θ··2 +[m2r2S2C2(1-S2α1)+2m2Cr]θ ·1θ ·2+m2F21θ ·22-12m2r2S2C2(1-S2α1)+m2F12 θ ·1+m2F22θ ·22
(33)
非理想旋转关节空间的动力学方程反映了关节力矩与关节变量、速度和加速度之间的函数关系,并引入了相关误差项,将力与运动结合在一起。
2.3.3 非理想机械结构动力学模型冗余项分析
非理想情况下激光追踪测量系统机械结构的动力学方程太复杂,需要做进一步的分析处理。
耦合惯性项对于加速度有关项的影响取决于偏心角α1。因此,耦合惯性项的影响程度取决于激光追踪测量系统机械结构的最大偏心角。激光追踪测量系统机械结构中允许的最大偏心角α1max可以使用上面得出的机械结构的动力学模型来估算。
对于安装在回转轴电机上的机械结构的惯性项,最大偏心角的正弦值为
sinα1max≤0.05
耦合惯性项小于主惯性项的5%可以忽略不计[14],则最大偏心角为
α1max≤3°
在激光追踪测量系统机械结构中,由耦合惯性项引起的不良影响小于主惯性项的1%,可以忽略不计。
对于主惯性项,实际的a2和d2很小也可能不存在,取决于激光追踪测量系统中的机械构件的加工和总体的安装过程。实际系统中a2和d2的实际值小于1 mm,同样与主要惯性项相比可以忽略不计。
科里奥利力项和离心力项如下:
(34)
(35)
因此,激光追踪测量系统机械结构的非理想动力学模型可以简化为

τ1τ2 =12(m1R2+m2r2S22)+(m1+m2)a210012m2r2 θ··1θ··2 +
(36)
由理想和非理想情况下的动力学分析可得,激光追踪测量系统在实际应用中追踪速度较低,经分析可以忽略所有科里奥利力项和离心力项的影响。激光追踪测量系统机械结构属于两自由度系统,动力学模型为两个相互独立的方程,可见对每一轴系可以单独进行分析和电机选择。
3 分析与讨论
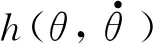
根据激光追踪测量系统动力学运动参数要求,运用ADAMS软件分别仿真机械结构从静止加速到追踪速度过程和以匀速追踪速度追踪过程两种情况下的关节力矩变化进行分析,激光追踪测量系统简化的机械结构ADAMS模型如图6所示。
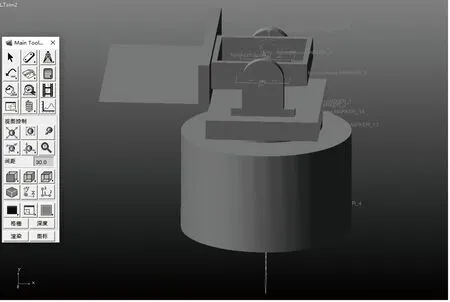
图6 激光追踪测量系统简化结构的ADAMS模型
3.1 加速启动过程
追踪测量系统机械结构在控制系统的控制下从对准目标靶镜的位置开始,要求在0.04 s的响应时间内达到匀速追踪速度,相关参数设置见表5,研究两轴力矩在启动过程的变化。

表5 启动过程运动参数
根据激光追踪仪控制系统的设计要求,负载曲线如图7所示。
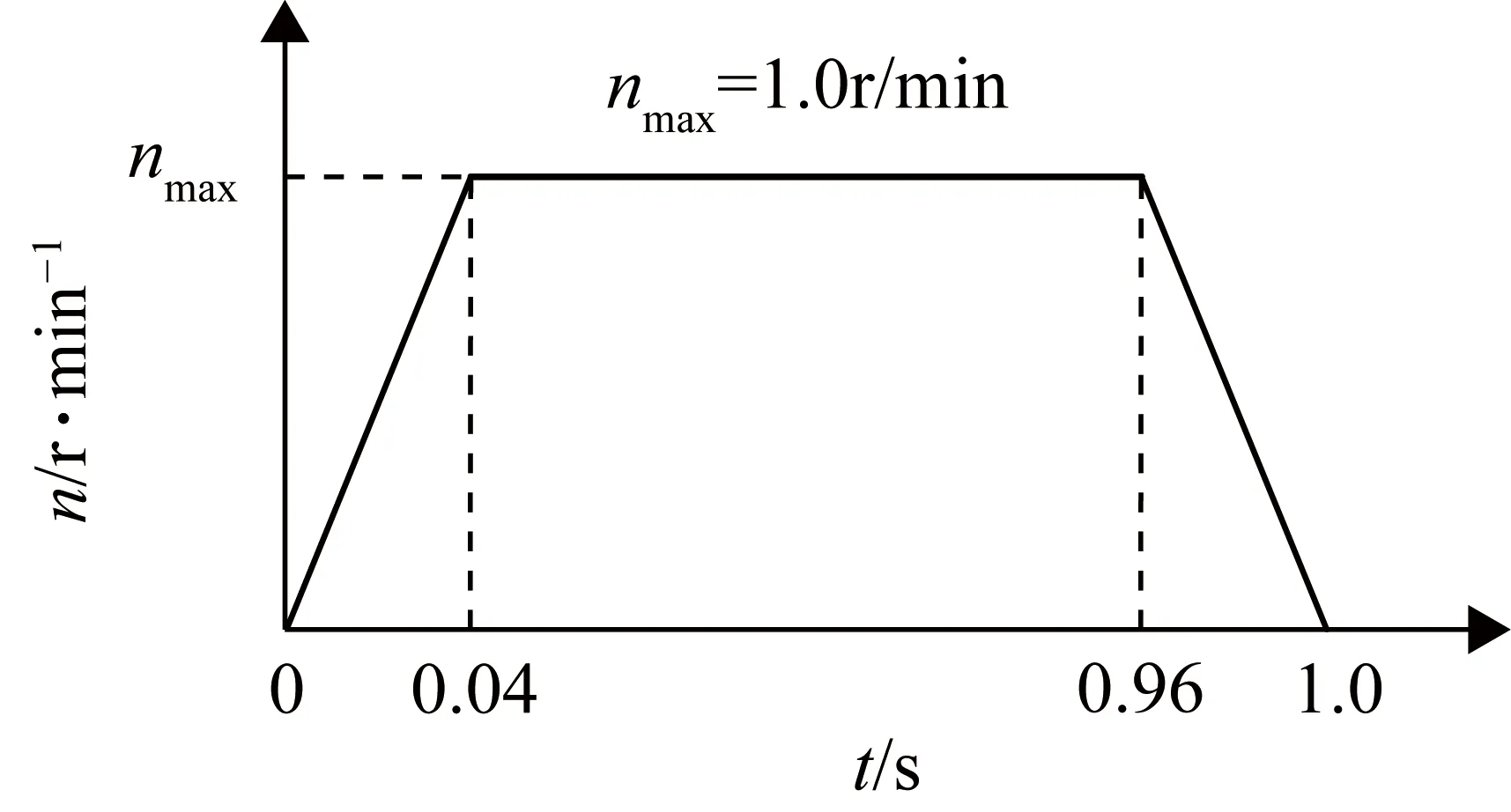
图7 负载曲线
计算得到系统的运动参数如表5所示。
按照运动参数要求,在ADAMS中为激光追踪测量系统机械结构的简化模型运动关节添加驱动函数,具体如表6所示。

表6 ADAMS驱动输入
得到回转轴和俯仰轴的关节处驱动力矩变化曲线,如图8、图9所示。
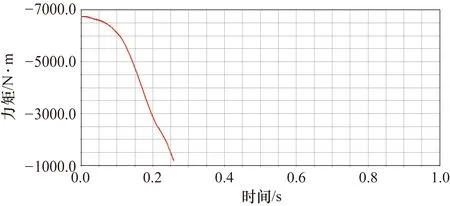
图8 回转轴驱动力曲线
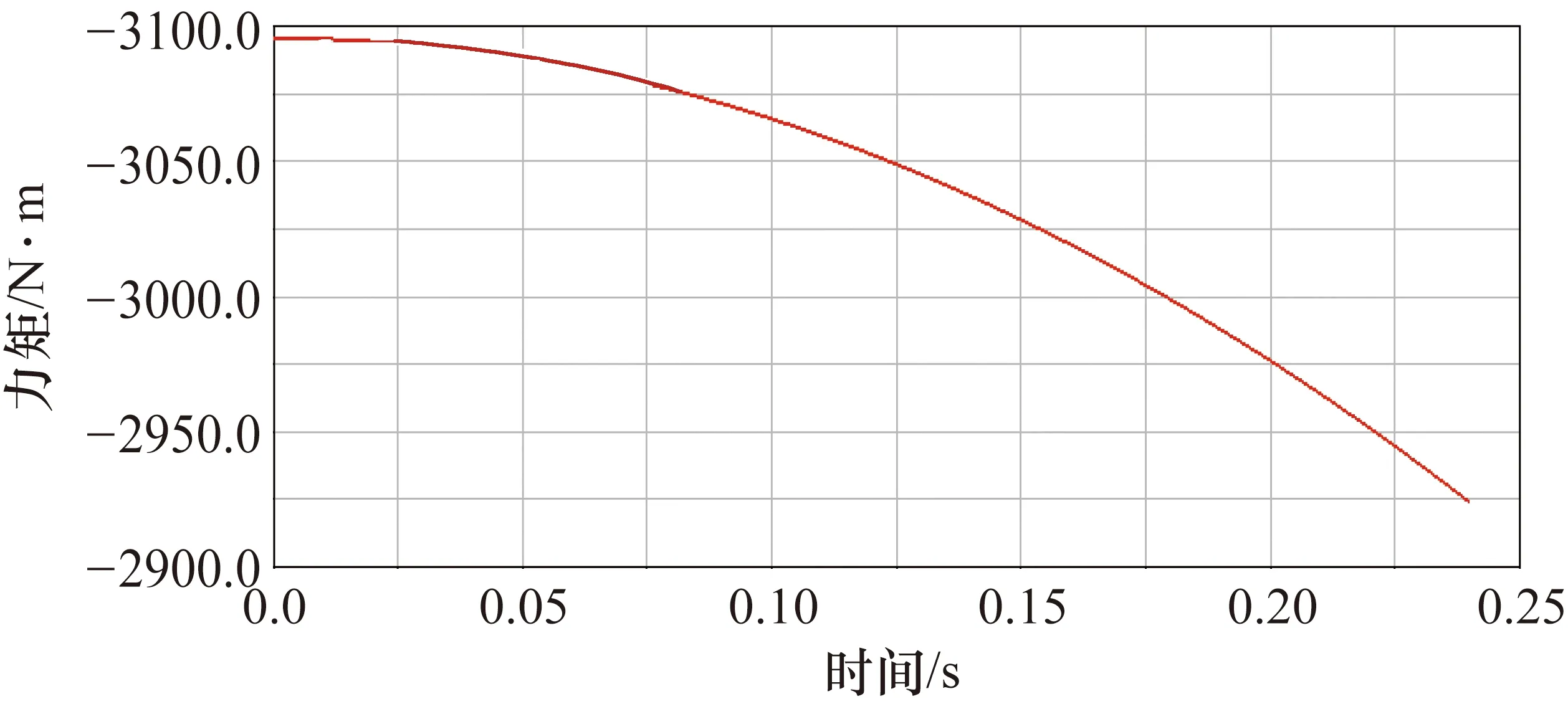
图9 俯仰轴驱动力曲线
通过力矩变化曲线可以看出,在加速启动的过程中,不考虑驱动力矩的方向,只研究前0.04 s其驱动力矩的最大值出现在t=0 s时刻,其对应的力矩最大值分别为:回转轴T1max=6.8 N·m,俯仰轴T2max=2.8 N·m,最大驱动力矩出现在开始加速的瞬时,与模型分析一致,在机械结构的设计过程中须保证大于此力矩值的强度。
3.2 匀速追踪过程
根据匀速追踪过程运动参数表(如表7所示),在ADAMS中为激光追踪测量系统机械结构的简化模型添加相应的关节驱动函数,具体如表8所示。

表7 匀速追踪过程运动参数

表8 ADAMS驱动输入
得到回转轴和俯仰轴的驱动力矩曲线如图10、图11所示。

图10 回转轴驱动力曲线

图11 俯仰轴驱动力曲线
由以上仿真结果可以看出,在匀速追踪过程中,驱动力矩值为零,与所建的动力学模型一致。
对激光追踪测量系统机械结构的动力学理想与非理想动力学建模进行分析,发现可以忽略机械结构参数引入的动态耦合项影响,通过ADAMS对机械模型的分析验证了动力学数学模型的准确性。
4 结束语
本文提出了激光追踪测量系统机械结构的动力学建模方法,通过对激光追踪测量系统机械结构的理想和非理想动力学模型建立和简化机械模型的ADAMS分析,可以得出以下结论。
① 激光追踪测量系统机械结构中没有显著的动态耦合力,与动态耦合力相关的耦合项,例如科里奥利力项和离心力项在系统测量过程中可以忽略。
② 激光追踪测量系统每一个运动轴系可以单独建立动力学模型并可以单独选择合适的电机。