机电一体化机器人关节及其驱控系统硬件设计
2021-03-11吕石磊曹其新孙明镜
吕石磊,曹其新,李 想,孙明镜,顾 凯
(上海交通大学 机械与动力工程学院, 上海 200240)
0 前 言
近年来我国的机器人行业蓬勃发展,产业规模基本保持20%以上增速,中小机器人生产企业不断涌现。在2017年11月的第十九届中国国际工业博览会上,机器人领域的相关展览和技术展示传递出行业发展的新动向:中小企业借力协作机器人迈向工业4.0 成为推动机器人市场高速发展的重要驱动力[1-2]。
然而相比于机器人在汽车等大型企业中的广泛应用,机器人在中小企业中的应用仍然十分有限。因为传统机械臂构型固定、无法根据任务的改变快速实现整体构型和规划的重部署,难以适应中小企业产品小批量、定制化、短周期的特征。因此,迫切需要新一代机器人关节,机电一体化关节的出现使得问题迎刃而解,自卡内基梅隆大学于1988 年为NASA 制作了世界第一台机电一体化关节样机(RMMS)开始[3],机电一体化关节虽然只有几十年的发展历史,然而却受到世界各国研究者的广泛关注及研究。
在太空领域,由于机电一体化关节模块化易替换的特点而得到了大量应用,德国研发了ROKVISS机电一体化关节[4-6],中国也研发了应用于太空站的高集成模块化关节[7],因价格昂贵,无法广泛应用。
在服务领域,加拿大Kinova公司设计了不同输出的关节[8],可以实现快速机械接插,能感应力矩、速度、位置等多类数据,然而力矩较小,并且精度较差。
在工业领域,德国的雄克公司和IGUS公司分别开发了PowerCube[9]和robolink[10]系列模块化关节,依然因为成本问题,而限制了使用场景。
目前机电一体机器人关节在太空、服务、工业等领域都有应用,但是他们有一个共同的问题就是成本高,功能针对性强,不通用,本文以机电一体化机器人关节关键技术为研究载体,对紧凑型的机电一体化机器人关节结构进行了优化,采用了新型的关节间连接方式,设计了基于霍尔传感的绝对码盘,集成多种传感器以提高智能性,在降低机器人在设计、部署、控制方面的成本的基础上,解决机器人通用化,模块化和标准化的问题。
1 机械结构设计
1.1 参数选择
综合现有的机电一体化机器人关节参数,本文关节的设计参数如下。
1)外形尺寸:直径约90 mm,长度约110 mm;
2)力矩:最大力矩约20 N·m;
3)转速:关节转速约35 rpm;
4)轻量化:关节质量尽可能小,轻量化设计。
1.2 功能要求
本文设计的机电一体化机器人关节主要实现的功能如下。
1)多种组合方案。为用户提供多种组合方案,用户可以根据自身具体的使用需求,利用设计的一体化关节进行拼装,组合满足使用需求的装置。
2)驱控一体化。将驱动器和多种传感器集成到关节之中,用户无需额外购买驱动器。
3)智能性。提供多种参数反馈,用户不需要掌握复杂的相关知识即可快速上手操作。
1.3 机械结构设计
机械系统主要包括减速器、电机、编码器、传感器等元件,关节结构图和实物图分别如图1和图2。

1.中空谐波减速器2.法兰3.中空直流无刷电机定子4.中空直流无刷电机转子5.外壳一6.外壳二7.光电反射式相对编码器8.霍尔式绝对定零度盘9.中空走线管盘10.中空走线管11.后盖12.控制装置13.铜螺柱图1 机电一体化机器人关节结构图Fig.1 Structure of mechatronics robot joint

图2 机电一体化机器人关节实物图Fig.2 Picture of mechatronics robot joint
为了减小齿隙,提高定位精度,本文设计的关节选用了中空的谐波减速器,并且电机也同样采用了中空的直流无刷电机,实现了从电路板直接通过中心孔走线引出关节的走线方式,简化了传统的走线方式,同时也更好地避免了走线的缠绕摩擦等问题[11]。
目前机器人关节的相对式编码器普遍采用透射式光电编码器,而本文设计的关节创新性地采用了反射式光电编码器,这种编码器在分辨率和精度与透射式相同的情况下,体积更小,可以放置于关节外壳内壁,不占用关节轴向空间,有利于实现轻量化的设计要求。不仅如此,本文设计的关节选用霍尔传感器,替换掉了传统关节采用的价格昂贵的绝对式光电编码器,通过在关节输出端加装霍尔传感的绝对码盘的方式,降低成本和提高可靠性的同时,也进一步减少了关节的整体体积。
外形方面,针对传统关节孔位固定,构型单一,无法重部署等缺点,为了方便用户根据自身需求进行重新组合,本文设计的关节采用了八边形外壳,并在八边形的每一面包括底面都布置了连接孔位,本文同时设计了与关节配套的连接件,连接件采用平行轴或垂直轴的结构,在保证构型多元化的前提下降低连杆的加工经费,避免使用过于复杂且加工难度高的连杆设计。图3列举了3种2个关节利用平行轴连接件进行连接的三维效果;图4列举了2种2个关节利用垂直轴连接件进行连接的三维效果;图5列举了利用关节可以组成的常见构型,实际可以有的连接方式要远远多于此。
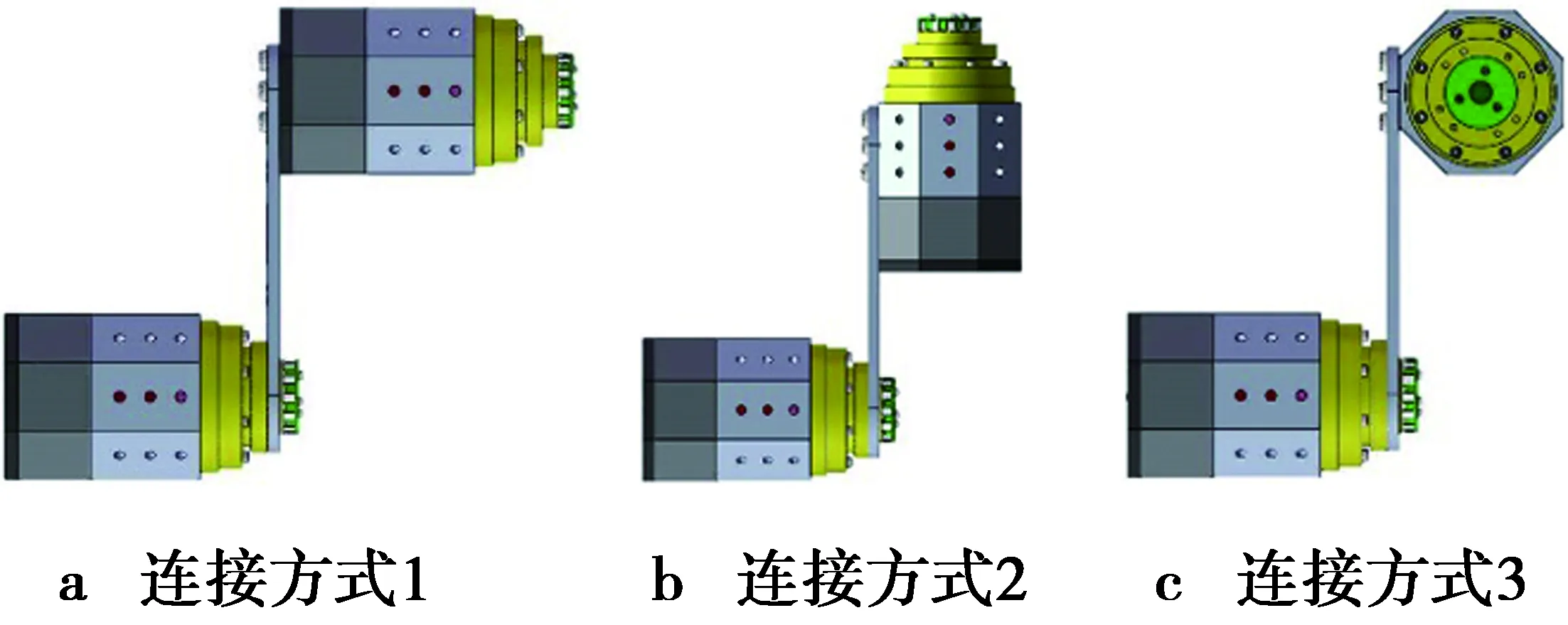
图3 平行轴连接件连接方式Fig.3 Connection methods of parallel shaft connector

图4 垂直轴连接件连接方式Fig.4 Connection methods of vertical shaft connector

图5 可组成构型举例Fig.5 Example of assimilable configuration
1.4 关节参数计算
减速比计算公式为
i=ia
(1)
(1)式中:i为关节的总减速比;ia为谐波减速器的减速比,由于采用电机直连谐波减速器的方案,因此,关节的总减速比直接取决于选用减速器的减速比,本文选用的减速比为100。
额定输出扭矩的计算公式为
T=Ta×i×ηa×ηb
(2)
(2)式中:T为关节的总输出扭矩;Ta为电机的扭矩,其值为0.319 N·m;i为关节的总减速比;ηa为电机的效率,其值为0.8;ηb为谐波减速器的效率,其值为0.75;将上述数据代入(2)式中可知输出扭矩T为19.14 N·m。
额定转速的计算公式为
n=na/i
(3)
(3)式中:n为关节最大连续转矩时转速;na为电机最大连续转矩时转速,其值为3 490 rpm;i为关节的总减速比,其值为100。将上述数据代入(3)式中可知最大连续转矩时转速n为34.9 rpm。
关节具体参数如表1。

表1 关节参数
2 驱控系统硬件设计
标准的机器人关节不仅需要一体化的关节机械结构,对于其相应的驱控系统也有特殊要求。如关节间电气连接要能够便捷连接,在完成机械安装的同时完成关节间电气连接;驱控电路板要与机械结构相契合,合理布局在关节结构中;驱控系统能够按照上位机的指令准确驱动关节内电机运动;驱控系统能为上位机反馈更多关节内外的传感参数。
单关节内的驱控系统以ARM (acorn RISC machine)板为核心处理芯片,通过转发上位机程序计算的速度、电流指令,实现驱动直流无刷电机的功能。周期性采集多类传感器的数据,将传感数据和驱动器反馈数据经由CAN (controller area network)总线或EtherCAT (ethernet for control automation technology)总线传输至上位机。整个系统由机器人各关节的总线引入供电,系统内实现5 V和4.3 V的降压稳压,供应各类芯片工作电压。其系统结构框图如图6。

图6 控制框图Fig.6 Control block diagram
2.1 控制模块设计
单关节的核心处理器选用ARM芯片[12],型号为意法半导体公司的STM32F103RET6,封装形式如图7,该芯片拥有1路CAN2.0通讯、3路16通道A/D转换、1路两通道路D/A转换、3路SPI通讯、72 MHz运算主频、512 kByte ROM、64 kByte RAM、8个定时器以及51路IO电平输入输出等。

图7 STM32F103RET6Fig.7 Structure of STM32F103RET6
STM32与驱动模块的接口为2个DA端口和2个AD端口,用于下发电机运动控制指令,如速度、电流、使能、制动等。STM32与通讯模块中CAN收发器的接口为CAN_Tx和CAN_Rx,从内部的CAN控制器指挥收发器接入总线;与EtherCAT从站芯片的接口为SPI通讯,通过EtherCAT从站芯片接入到总线。STM32与传感模块中的温度传感器的接口为数字单总线,读取温度传感器对应地址寄存器的值;与IMU的接口为串口,读取加速度和角速度值;与霍尔感知的编码盘的接口为10路GPIO,每个引脚对应绝对位置中的一个,读取是否被磁铁触发。STM32与电源模块的接口为4.3 V的稳压输入。另外从STM32的IO引出JTAG下载调试脚,一个红色LED指示灯和一个绿色LED指示灯。
2.2 驱动模块设计
本文设计的机电一体化机器人关节使用的电机为Maxon公司的EC60直流无刷电机,ESCON Module驱动电路原理如图8。使用图8中的ESCON Module 50/5作为驱动部件,反射式光电编码器作为相对编码器,将黑白等距条码打印在光面纸上贴在EC60转子的外壳上,转动时可以触发关节内壁的反射式光电编码器,从而输入到驱动模块中,为速度和位置控制提供反馈。

图8 ESCON Module 驱动电路原理图Fig.8 Structure of ESCON Module
2.3 通讯模块设计
本文设计的一体化关节出于适应不同上位机系统和不同使用者使用要求的考虑,采用CAN和EtherCAT双通讯的方式[13-15]。
CAN通讯选用的ARM芯片自带CAN控制器,CAN收发器电路如图9。

图9 CAN收发器电路原理图Fig.9 Structure of CAN transceiver
EtherCAT通讯则略有不同,需要使用EtherCAT从站芯片,本系统选用LAN9252芯片,该芯片与ARM板之间通过SPI通讯,即可将单关节接入到EtherCAT总线中去,EtherCAT从站框图如图10。
2.4 传感器模块设计
上位机完成诸如运动规划等复杂控制需要参考关节的基本数据,如速度、位置、电流反馈信号。本文设计的关节模组在囊括了以上传感数据的基础上,还创新性地在关节中加入了温度传感器和陀螺仪加速度传感器,上位机结合温度传感器传回的温度信息与电流传感器传回的电流信息进行对包括电机,驱动器在内的部件工作状况的实时监控,满足目标需求基础上,智能调控各关节输出力矩和工作电流的机-机协作策略。利用陀螺仪传感器传回的位姿和加速度信息,配合动态卡尔曼滤波算法,自动进行运动学参数辨识和机器人整体构型识别。
2.5 电气连接设计
为了实现即插即用和降低使用门槛的设计要求,对电气连接进行了集成设计如图11,图12。将电源和信号的传输集成于一个接头,每个关节只有一根线路伸出,并且只提供一个插口,插口的方向也是唯一确定的,无法反向插入,用户只需要正确插入插头就完成了关节间的电源和通讯连接。
2.6 PCB设计
由于关节直径的限制,所有模块无法分布于一块PCB板上,同时考虑到信号隔离与干扰的问题,将输入输出和驱动等大电流元件与处理器存储器等小信号元件分隔开摆放,因此,采用了上下2块板的分体式设计,利用排针和排座进行连接。电路板实物图如图13。

图11 电气连接原理图Fig.11 Structure of electrical connector

图12 电气连接实物图Fig.12 Picture of electrical connector

图13 PCB实物图Fig.13 Picture of PCB
3 实 验
单个关节支持对位置,速度以及电流的直接控制,其中位置控制是关节控制的核心。使用经典的电流,速度,位置三环PID控制方法,对一体化关节的基本功能进行验证。
机电一体化关节的位置控制功能结果如图14,关节能够成功对上位机下发的正弦波形的位置控制指令进行跟随,并且通过总线向上位机反馈实时位置速度以及电流,位置跟随的平均延迟小于500 ms。
为了验证关节的可快速重构性,将2个关节安装于基座组成的一个简易两自由度机械臂如图15。通过电脑中的上层软件进行运动控制,关节可以根据软件的指令进行相应的运动,并且软件中的虚拟机械臂和实际机械臂运动状态相同,证明关节间电气连接正常,可以为多关节正常供电;传感器工作正常,可以正确反馈其所在关节的工作状态;通信系统工作正常,可以将多个关节的传感器信息及时反馈给控制系统和软件系统,为控制算法和软件开发提供了稳定的硬件平台。

图15 两自由度机械臂Fig.15 Two degrees of freedom robot arm
4 结束语
本文根据中小型企业对于机器人的功能需求,针对传统机器人关节构型固定无法重部署的缺陷,设计了机电一体化机器人关节及其控制系统,采用将电机驱动、谐波减速、绝对码盘定位、温升测量、姿态和加速度感知集于一体的设计方案,该设备具有结构紧凑,通用性强和可快速重构等特点,利用该设备可以快速组合出多种结构,大大缩短产品的设计周期,降低了时间成本,为机器人技术进入中小企业提供了部件支撑,可促进机器人的大规模应用。
