提高多芯片拼接线性度的新方法
2021-03-10高慧莹
高慧莹,左 宁,艾 博
( 中国电子科技集团公司第四十五研究所,北京100176)
随着光学探测技术的发展,感光元件的面积越来越大,精度越来越高,组成感光元件的芯片拼接尺寸越来越小、数量越来越多,尤其当成像尺寸到达15 000 像元的时候,不仅对芯片拼接的单行直线度要求越来越高,且对行与行之间的平行度要求也提出了严格的要求。传统的通过CCD 观察、手动拼接已远远不能满足要求,迫切需要进行自动拼接、在线测量,以保证芯片拼接的质量及效率。
1 芯片集成拼接工艺流程
芯片集成拼接方法如图1 所示,主要是为了保证芯片拼接后每一行的直线度和行与行之间的平行度。

图1 芯片集成拼接示意图
芯片拼接工艺流程如图2 所示。拼接主要环节为五步:
(1)通过CCD 观察进行第一片的拼接,并测量拼接后的芯片上两个特征点位置坐标;
(2)根据第一片拼接的两个特征点坐标,结合拼接允许误差,确定第二片的拼接位置并进行第二片自动拼接,并进行第二片芯片的特征点位置测量;
(3)根据第一片、第二片四个特征点拼接位置,结合拼接误差确定第三片芯片的拼接位置,并进行测量,以此类推,确定同一行第m个芯片的拼接位置并进行拼接和测量;

图2 拼接流程示意图
(4)根据第一行的芯片拼接特征点坐标,进行线性度拟合,确定第一行芯片拼接的直线度,并根据直线度允许误差,确定第二行第一片的芯片拼接位置,并进行拼接;
(5)按照第二步、第三步的方法,完成第二行的芯片拼接并测量直线度。以此类推,进行第n行芯片的拼接和测量。
2 芯片拼接方法
芯片上选2 个特征点,将2 个特征点坐标分别定义为(xnm1,ynm1),(xnm2,ynm2),其中n代表从上到下的行顺序,m代表行内的从左到右的芯片顺序。同一行两片芯片间的间距为a,每一行之间的间距为c。直线度允许误差定义为(△x1、△y1),平行度允许误差定义为(△x2、△y2),所有坐标的提取均通过CCD 扫描,图像识别自动在线提取。
2.1 首片拼接后的处理
在基板上的固定位置将首片芯片拼接粘合后,通过CCD 扫描,图像识别,得出其上两个标记点的位置坐标:

通过这两个坐标拟合出连接这两点的直线方程式为:

该直线的斜率k为:

该直线的截距b为:

结合两片芯片间的间距a和可接受的位置误差△x1、△y1,可以通过如下公式确定出第二片芯片拼接两个特征点的位置范围。
(x121,y121)的坐标范围为:


(x122,y122)的坐标范围为:

2.2 单行第n+1 片芯片的拼接方法
确定了第二片芯片的拼接位置后控制设备进行拼接操作,拼接后再使用CCD 相机对新拼接好后的芯片进行图像扫描,从第三片起识别出每一个刚拼接好的芯片上的两个标识点的具体位置坐标:

通过将前n片芯片上的2n个特征点坐标值代入最小二乘法公式进行计算,即可拟合出一条线性归回直线方程,其用到的公式见式(8)~式(11):

线性回归直线方程的表达式为y=kx+b,其中参数k为该条直线的回归系数,可以用其描述该直线的倾斜程度,b为截距。要求出公式中的参数k和b,可以使用公式(12)、(13)进行计算:

继续通过间距a和位置误差范围△x、△y,即可通过以下公式确定出第n+1 个芯片拼接的两个特征点位置。
(x1(n+1)1,y1(n+1)1)坐标范围为

(x1(n+1)2,y1(n+1)2)坐标范围为:
2.3 第n 行芯片的拼接方法
在拼接完成上一行的芯片后,通过将两行芯片之间的垂直位置间距c代入计算方法,即可求得该行首片芯片第一个标记点的粘接坐标(xn11,yn11)。为了保证每行芯片的平行度达标,将坐标(xn11,yn11) 和上一行的线性回归直线方程中的斜率k代入的表达式y=kx+bn中,即可求得参数bn的值如式(18):

将两标记点之间的距离d引入,即可求出该行首片芯片的第二个标记点坐标(xn12,yn12)式为:

通过计算得出的该行首片两标记点坐标,即可得出其拼接具体位置。拼接完成首片后,采用和单行拼接时首片拼接后的处理同样方法来拼接第二片(同前述2.1 节),配合CCD 图像扫描,从第三片起,使用反复迭代拟合直线的方式来对该行剩余芯片进行拼接(同前述2.2 节)。第n行芯片拼接流程如图3 所示。
3 拼接后直线度平行度检测
处理坐标数据拟合曲线的方法有多种,我们遵循设备工艺特点采用了最小二乘法来对每组坐标数据进行拟合,求出其线性回归方程,通过分析该线性方程,即可比对出拼接后芯片的几何位置直线度以及平行度。
获得了每条直线方向拼接后芯片的位置坐标数据后,将每组坐标数据通过最小二乘法进行拟合求出其线性回归方程。
通过计算得出拼接后芯片位置的线性回归方程后,即可用以下方法计算求出芯片拼接的直线度和平行度:
直线度:对每一组坐标拟合出的直线进行拟合计算,如果第一个标识和最后一个的垂直位置相差在直线度允许范围内,则该水平方向上的芯片拼接直线度符合要求,反之亦然。

图3 多行芯片拼接流程
平行度:将两组坐标数据拟合出的线性回归方针的斜率k、k′进行对比,其误差在平行度允许范围内为拼接平行度合格,反之亦然。
在直线度、平行度的检测过程中,我们设定直线度、平行度的范围为±5 μm。
3.1 芯片水平位置检测
通过内置模块的自动计算处理,即可快速检测出芯片拼接水平位置的放置误差,并且实时传递给拼接设备对其进行校准,高效可靠。如下图所示为使用通过图像获取到的坐标数据来计算直线度和平行度的算法流程。
3.2 检测方法
对涉及的算法进行编程,最终求出线性回归方程y=ax+b。
程序代码中的变量dSumX、dSumY为识别点x、y坐标的和,dMeanX、dMeanY为识别点x、y坐标的平均值,通过对每一个识别点的x、y坐标分别进行累加后处理求得:

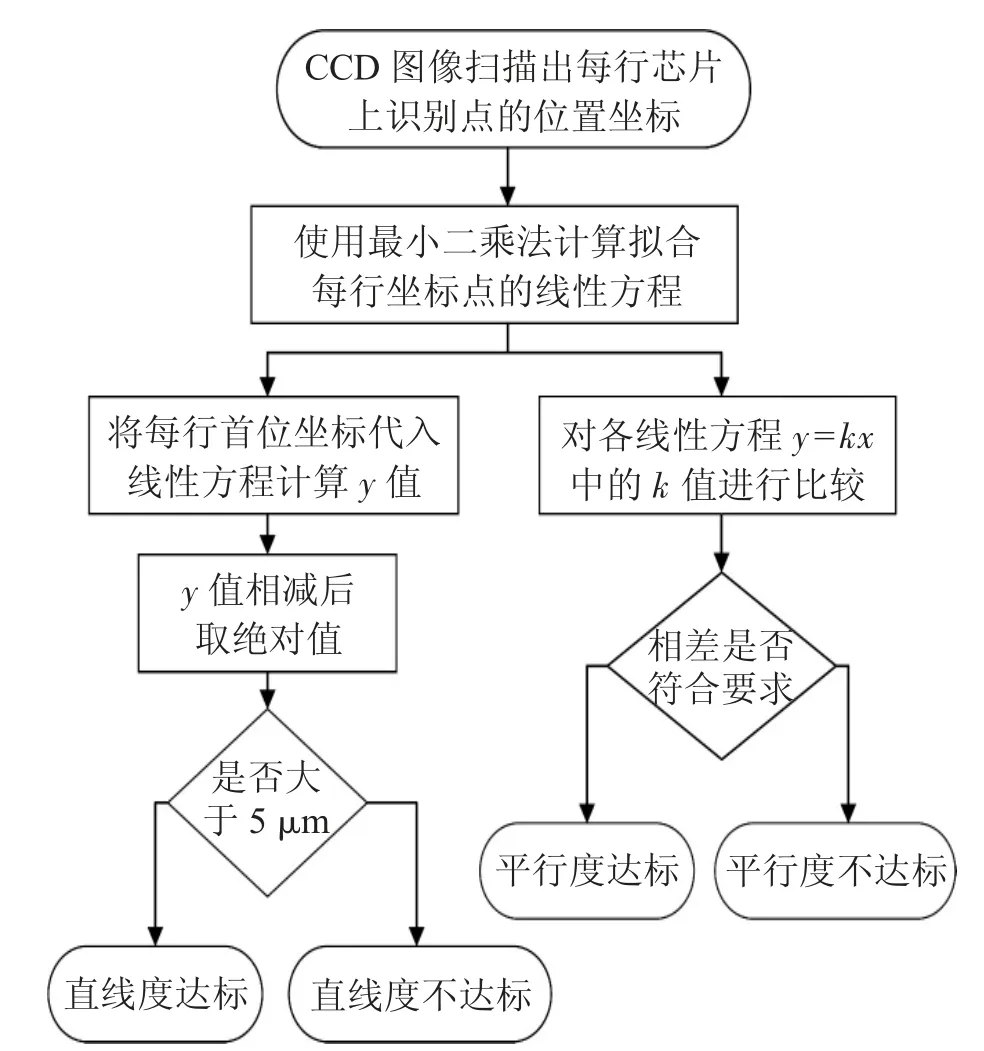
图4 计算直线度和平行度算法流程
求得所有参数后,将最小二乘法求线性回归方程的公式通过代码实现,即可求得线性方程的斜率a以及截距b:


4 检测算法仿真分析
为了验证上述方法的可行性,通过CCD 提取拼接后需要检测的2 行,每行各15 个特征点的位置坐标,数据如表1 所示。
利用特征点散点位置坐标,通过最小二乘法拟合出如图5 所示的拟合直线,并得出线性回归方程分别为:

分析图5 中的2 条拟合直线及其方程,可见第一行在垂直方向的误差为3.2,线性回归方程斜率为0.058。第二行垂直方向的误差为2.1,线性回归方程斜率为0.038。假定设定的直线度误差阈值为5,则该次拼接的直线度达标。将方程1 和方程2 的斜率进行对比即可求得其平行度数值。假定设定的平行度斜率差不能超过0.05,则模拟的两行芯片因其拼接各自的线性回归方程斜率差为0.02,则可判定其平行度达标。

表1 CCD 提取位置坐标数据表

图5 仿真计算平行度
5 结束语
通过智能化、自动化的拼接方式解决手动拼接中的误差过大、一致性不好、效率低等工艺问题已成为光学检测领域多芯片拼接的主要发展趋势。本文采用位置坐标拟合,拼接预定位等方法实现多芯片自动拼接,提升了芯片拼接的线性度,并通过仿真分析和实例验证,证明该方法可有效提升芯片的拼接精度,确保拼接直线度、平行度在可控误差范围内。
