基于仿生咀嚼平台的黏弹性食品质地检测系统研究
2021-03-10顾晨龙周星宇杨涛涛钱善华俞经虎
顾晨龙 周星宇 杨涛涛 钱善华 俞经虎
(江南大学机械工程学院,江苏 无锡 214122)
食品质地是评价食品品质的重要指标,质构检测工作对于整个产业链都非常重要[1],食品质地研究也越来越热门[2-3]。大多使用质构仪获得食品质地的数值描述[4],周显青等[5]用质构仪测定米粉条表面黏性;符秀敏[6]用质构仪对明胶软糖进行了测试,同时进行了感官评价以找出一种能与感官评价完全匹配的质构仪测试方法;Behic等[7]研制了质地测试仪,并用此装置测试了玉米粉的黏弹性;孙钟雷等[8]利用仿生技术设计了仿生咀嚼装置并对苹果、胡萝卜进行了测试,但是其咀嚼动作只是简单的上下咬合。食品质地检测应遵从一个原则:以人的实际感官评价为标准,越好的食品质地检测装置,越是接近人的实际感官[9]。试验针对现有质构仪食品质地的检测只是近似模仿牙齿咀嚼运动,且测试端探头与人的牙齿构造不符;而现有仿生咀嚼平台只考虑了结构的仿生性,虽然能实现咬合动作,但存在未考虑人真实咀嚼硬物时的左右横向剪切、磨碎等动作的问题,试验拟设计出一款能够模仿人类口腔咬合、剪切、磨碎等咀嚼运动的仿生咀嚼平台,并且实现软件对硬件的仿生咀嚼运动控制和测试数据的后续处理,以期用于客观、准确、快速评价食品质地。
1 仿生咀嚼平台运动学分析
1.1 仿生咀嚼平台结构组成
UG软件设计的六自由度仿生咀嚼平台三维模型及机构简图如图1所示。
该六自由度的并联驱动机构静平台是固定的,动平台通过连杆和两组球副机构与滑块相连,动平台模拟下颌骨、动支链模拟咀嚼肌肉,当咀嚼平台工作时,步进电机在程序的控制下驱动丝杠,丝杠螺母副将回转运动转化成直线运动,使得6根连杆上下运动,在连杆驱动下动平台实现三维空间的各种咀嚼运动,若各步进电机驱动丝杠转过的角位移不同,那么最终动平台的位置和姿态也会不同。
1.2 仿生咀嚼平台运动分析

(1)
式(1)中的4×4的矩阵又被称为齐次变换矩阵,该式中同时包含了一般变换的旋转和位移。当坐标系{B}相对于坐标系{A}的描述为X-Y-Z固定坐标系描述时,有:
(2)
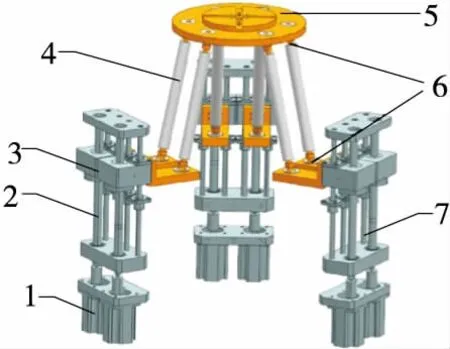
1. 移动副 2. 丝杠 3. 滑块 4. 连杆(Li) 5. 动平台 6. 球副(S) 7. 导轨
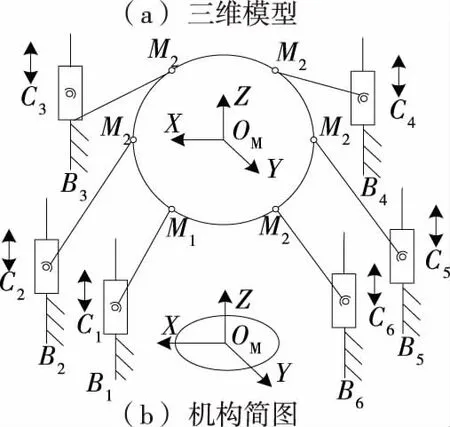
图1 仿生咀嚼平台三维模型及机构简图
位置逆解是在动平台的最终位姿为已知情况下求解各运动支链的运动量[11]。单支链简图如图2所示,试验研究的PSS仿生平台的运动学逆解即求得|AA0|的长度。
(3)

(4)
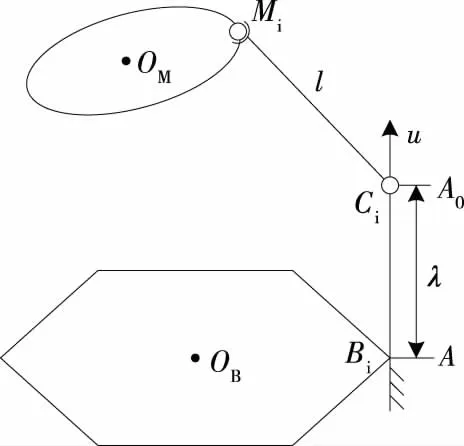
图2 仿生咀嚼平台单支链简图
图2中,选择A0作为截断点,A0位于以Mi为球心,半径为l的球面上,并且A0在方向为u且通过A的直线上[12]。球面方程在基坐标系的表达为:
l2=(x-BMix)2+(y-BMiy)2+(z-BMiz)2。
(5)
由机构特性知:滑动副始终处于动平台的下方,将式(3) 代入式(5)并舍去负解,可得:
(6)
1.3 基于ADAMS虚拟样机的动平台仿真分析
为了验证位置逆解的可靠性和动平台的仿生性,采用ADAMS虚拟样机对动平台进行仿真分析。在咀嚼黏弹性食品时多用磨牙进行咀嚼,磨牙的运动轨迹近似为空间的椭圆,且呈明显的单侧咀嚼特征,在动平台质心位置添加六自由度的一般点驱动,根据咀嚼运动轨迹方程,输入的驱动参数:
TraX=25.2+5.09*SIN(2*pi*time)+10.08*COS(2*pi*time )
TraY=18.92+14.5*SIN(2*pi*time)-17.8*COS(2*pi*time )
TraZ=-46.6+10.2*SIN(2*pi*time)+16.6*COS(2*pi*time )
RotX=0*time
RotY=ATAN(-(-46.6+10.2*SIN(2*pi*time)+16.6*COS(2*pi*time ))/(25.2+5.09*SIN(2*pi*time)+10.08*COS(2*pi*time ) ))
RotZ=ATAN((18.92+14.5*SIN(2*pi*time)-17.8*COS(2*pi*time ))/(25.2+5.09*SIN(2*pi*time)+10.08*COS(2*pi*time ) ))
在轨迹方程的驱动下,动平台的运动轨迹呈泪滴形,且动平台在运动过程中Y坐标均为负值,说明磨细运动呈明显的单侧咀嚼的特征,而这与试验人员测量的人类咀嚼轨迹一致。在咀嚼运动下,下颌先进行侧向运动,y方向的位移先达到最大值,然后进入开口阶段,z方向和x方向的位移量也达到最大值,最后进入闭口阶段,牙齿回到咬合位置。
图3为6个移动副的位置变化,可以看出由于机构支链的对称设计,支链1/2、3/4、5/6的位置变化趋势也是两两接近。在单侧磨细运动中,支链1/2先达到极限位置,然后是支链3/4,此时下颌已经完成开口动作,接着在下颌的闭口和咀嚼运动中,支链5/6达到其最大位置,过程中6个支链曲线变化平顺,无明显的阶跃点,证明结构设计的合理性,同时6个支链的位姿变化曲线也能够为控制程序提供参考。
2 食品质地品质评价系统程序开发
2.1 仿生咀嚼平台控制
搭建的试验平台如图4(a)所示,仿生咀嚼平台的控制硬件主要由控制计算机、运动控制卡(深圳众为兴技术股份有限公司,ADT-856型)、高精度A/D模数转换卡、步进电机、编码器和S型压力传感器(北京华控兴业科技发展有限公司,BSTL-BLSM-500KG型)等主要部件组成。控制原理如图4(b)所示。以Labview作为上位机驱动步进电机从而控制动平台进行运动,并实时采集力传感器的数据,量程为-10~50 kg,工作电压为24 V,传输信号为4~20 mA,精度为0.15 N。

图3 6个移动副的位置变化
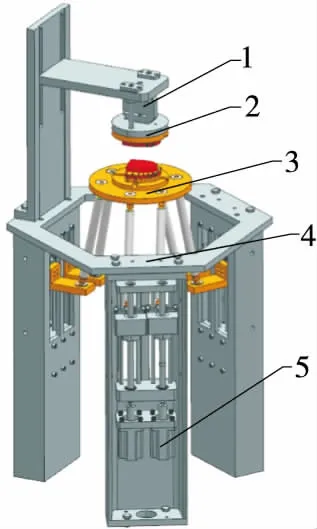
1. 力传感器 2. 静平台 3. 动平台 4. 机架 5. 步进电机

图4 平台控制原理
其工作原理是物性测试系统接收用户输入,将用户输入的参数转变为每个步进电机的脉冲数。食品物性检测系统通过控制计算机将脉冲数传送给运动控制卡。运动控制卡根据接收到的脉冲数来控制每个步进电机的步数。编码器获取步进电机的角位移,并将采集到的数据传输给运动控制卡,运动控制卡还依照编码器采集的位移信号和理想值之间的偏差,对步进电机实行反馈控制。这样对不同的步进电机给定不同的脉冲量,最终动平台会有不同的位姿。最后物性测试系统对数据进行处理即可得到食品的质地属性。
2.2 黏弹性食品物性检测
物性计算的程序框图如图5所示。计算过程主要分为3部分:数组转换和滤波、各关键点的寻找以及物性计算。
由于试验过程中传感器精度以及干扰的问题,在样品与探头接触前,力传感器采集到的力总是有轻微的波动,这会影响到关键点的寻找,甚至会影响试验结果,因此在进行关键点的寻找前需将这段波动过滤并转换成数组,以便后续计算,图6(a)为滤波及数组转换图;由图5可知,物性计算重要的点都是极值点和零点,各关键点的寻找可转化为寻找合适位置的极大值点和零点,寻找各关键点索引的程序框图如图6(b)所示,具体算法:① 寻找大于1的极大值点,第一个即为x脆;② 从x脆往左搜索零点,第一个零点即为咀嚼开始点x0;③ 从x脆往右搜索零点,第一个零点即为x1;④ 在(x0,x1)区间寻找最大值点,该点即为x硬1;⑤ 从x1往右搜索小于-0.5的极小值点,该点即为xmin;⑥ 从xmin往右搜索零点,第一个即为x2;⑦ 从x2往右搜索大于0.5的极大值点,第一个即为x硬2;⑧ 从x硬2往左搜索零点,第一个即为x3;往右搜索零点,第一个即为tmax。
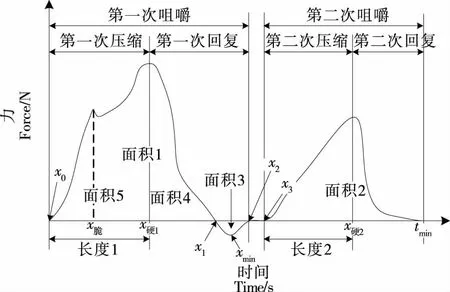
图5 典型的TPA质地谱图
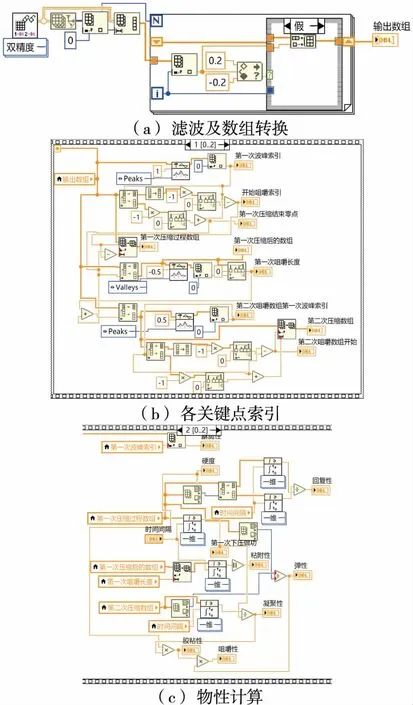
图6 物性计算程序框图
经过上述关键点的搜索,接下来就可以利用这些关键点按相关公式计算得到样品的物性值。
2.3 物性检测系统开发
上位机采用Labview2018虚拟仪器软件开发环境,由于G代码无需书写繁琐的程序代码,缩减了研发周期[13]。程序主要包括3个部分:平台咀嚼控制模块、实时数据监控及记录模块、数据分析与处理模块。系统的总体结构如图7(a)所示。界面线程、工作线程和监控线程之间利用消息队列进行通信。咀嚼过程中,工作线程完成咀嚼运动,监控线程完成数据采集和数据存储,主线程完成与用户交互,这样各司其职,使得系统逻辑更加清晰。
程序开启后,对上下牙颌位置进行啮合校正,单击程序右侧牙齿啮合校正,下颌动平台会以一定速度向上移动,当上下颌刚好啮合,无侧方偏移时,系统记录此时动平台位置为零点,6个支链的位置为初始位置,并以此作为参考。然后单击开始监控,各支链步进电机自带的编码器会将角位移信号转换成电信号,检测系统采集电信号并换算成位移来实时记录各个支链的位置。此外在主界面还可以手动选择咀嚼运动方式,如图7(b)所示,可根据测试物品的不同手动选择压缩模式或者剪切运动模式。除TPA试验外还可进行应力松弛与应变松弛试验。


图7 系统结构与界面
3 食品质地检测系统试验
3.1 试验方法
为了验证该检测系统的可靠性,选取Φ15 mm×25 mm 栗米烧软糖(市售某品牌)作为试验食品样本,分别通过上述的仿生咀嚼系统与TMS-PRO型质构仪(美国FTC公司)开展检测试验并比较结果。试验中,仿生咀嚼平台采用树脂仿生牙齿探头,压缩率设置为80%,压缩速度设置为1 mm/s;质构仪在探头上分别选用了牙齿探头和38 mm的圆柱探头,压缩率设置为80%,压缩速度设置为1 mm/s,检测精度0.015%,数据采集率大于2 000组/s,精度2.5 μm,试验分别重复进行3次,依据TPA试验的物性计算方法,将得到的物性取平均值。
3.2 试验数据与分析
试验结果如表1所示。

表1 仿生咀嚼平台和TMS-PRO型质构仪的对比†
由表1可知,仿生咀嚼平台和TMS-PRO型质构仪用牙齿探头测试的物性都比较接近,而对于黏附性和内聚性来说,TMS-PRO型质构仪测试的数值明显小于仿生咀嚼平台,导致这一现象的原因可能是质构仪上下颌未与样品得到更充分的接触,导致食品的粘附作用较小,对样品的破坏程度小。相较于38 mm圆柱探头,硬度、内聚性、回复性和咀嚼性有较大差异,这是因为圆柱探头相较于牙齿探头,接触面积更大,样品受力更大,对样品的破坏更完全。多次试验表明,在相同条件下,仿生咀嚼平台与TMS-PRO型质构仪测得的数据相接近,可以应用于黏弹性食品的质地检测中。
4 结论
基于仿生咀嚼平台,实现了六自由度的仿生咀嚼运动;利用虚拟仪器技术开发了食品物性检测系统,实现了对机器人的运动控制、数据实时采集、数据动态显示、关键点寻找、数据处理并计算得到食品物性。最后通过实验验证,与现有设备测得的数据相接近,可实际应用于食品的物性检测,运行情况稳定。
与传统测试所采用的质构仪相比,通过运动控制程序的编制,仿生咀嚼平台的运动方式贴近于人的实际咀嚼运动轨迹,测得的数据能够更贴近于人的真实感受。系统以Labview图形化编程语言为核心,有效缩短了开发周期,操作简单,使用方便,为食品质地检测分析提供了一种良好的研究手段。由于不同的探头硬度不一样,后续将探究食品与探头的作用原理以及仿生咀嚼平台运动方式与食品质构之间的关系。
