基于三维激光扫描的既有铁路中线勘测方法研究
2021-03-10付建红胡庆武
朱 璟 付建红 胡庆武 崔 昊 董 伟 吴 玄
(1.武汉大学遥感信息工程学院,武汉 430079; 2.郑州大学水利科学与工程学院, 郑州 450001; 3.中铁第四勘察设计院集团有限公司, 武汉 430063)
随着既有铁路行车密度变高,其检修、维护工作时间也随之缩短,这对铁路服役状态检测手段提出新要求。另一方面,随着中国高速铁路线路不断扩展,与既有铁路的对接日趋紧密,既有铁路网也需进行改造,以加强运输能力。因此,线路勘测是既有铁路改造、维护以及增建二线的重要环节。传统的既有线勘测以铁路中线为控制线,基于全站仪、水准仪等进行接触式测量,存在测量时间长、效率低等缺点,影响铁路正常运行。随着GNSS测量精度的不断提高,部分铁路勘测项目开始使用GNSS-RTK方法,虽然提高了测量效率,但仍需进行接触式作业,已难以满足现代化铁路既有线勘测的安全性与效率要求[1-4]。
激光探测及测距技术(Light Detection and Ranging, LiDAR)通过激光扫描仪获取目标表面的高精度三维坐标[5],具有速度快、精度高、受天气影响小等优点,已在地形测量、建筑物变形监测和智慧城市等方面得到广泛应用。其中,机载LiDAR与航天航空遥感技术受分辨率和精度限制,主要用于铁路前期勘测设计和后期运营阶段大范围背景地形数据获取[6-9]。而地面三维激光扫描通过固定设站或移动式三维激光测量,可获取高密度、高精度的三维坐标,为既有铁路的勘测、维护以及增建二线提供技术支撑。
已有许多学者开展相关研究,OUDE ELBERINK S等研究如何根据铁路轨道上点之间位置的相关性,并使用地面扫描数据自动检测并重建铁路轨道[10];李建强设计基于移动激光扫描铁路测量方案,通过精度验证探讨了地面激光扫描技术既有铁路勘测的优势与缺陷[11];YANG B等使用钢轨的反射强度来进行钢轨的检测与提取[12];MENG X等基于地面的三维激光扫描点云数据,搜索特征点并进行连接,构建铁路轨道模型[13];SONI A等通过使用迭代最邻近点(Iterative Closest Point, ICP)方法将固定设站的地面激光扫描结果与标准钢轨模板进行匹配,发现距离设站越近,截面拟合效果越好[14];李小路等研究了多种地面三维激光扫描点云轨道提取技术[15]。然而,固定式或移动式地面三维激光扫描均易受视角限制,导致获取的铁路轨道三维激光点云都存在相互遮挡、轨道及边缘点云不完整等问题,影响轨道中心线提取精度。
铁路轨道由两条平行标准钢轨组成,两条轨道之间距离固定,具有显著的结构特征,这对于从海量轨道点云中提取钢轨十分有利。当前,基于三维激光点云的提取技术考虑了轨道平行的特点,以及钢轨上特征点与地面的相对关系,但没有充分利用标准钢轨模板点云中点之间的相对关系,当钢轨点云不完整时,直接影响钢轨线型提取的精度和稳定性。为了解决铁路轨道三维激光点云不完整对钢轨线型提取的精度和可靠性问题,提出基于钢轨结构特征约束匹配的三维激光点云轨道中心线自动提取方法,通过存在信息缺失的轨道点云与标准钢轨模板进行匹配,充分利用已知点信息,降低边缘遮挡对钢轨提取结果的影响,以提高钢轨自动提取的精度和鲁棒性。
1 方法简介
铁路及其各种设施具有明显的结构特征,左右钢轨与轨道中心线距离相等且固定,且具有相同的形状和尺寸,如钢轨高度、轨头宽度、轨底宽度等。但受激光扫描角度限制及场景目标设施相互遮挡,钢轨点云通常存在缺失和噪声,如图1。
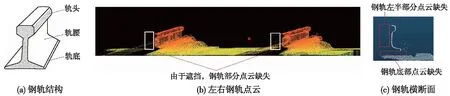
图1 三维激光扫描钢轨点云
钢轨轨头顶部最高处通常为轨头中心(即钢轨中心线),可以取钢轨横断面上高程值最大点作为钢轨中心线。对钢轨进行三维激光扫描时,遮挡或噪声会导致钢轨点云不完整,直接以左右钢轨轨头点云顶部高程最大值计算的中心线会存在较大误差。因此,通过实际钢轨断面点云与标准钢轨进行严密几何配准,以标准钢轨的几何特征直接计算不完整钢轨点云中钢轨的中线三维坐标,可减少计算误差,其算法流程如图2。
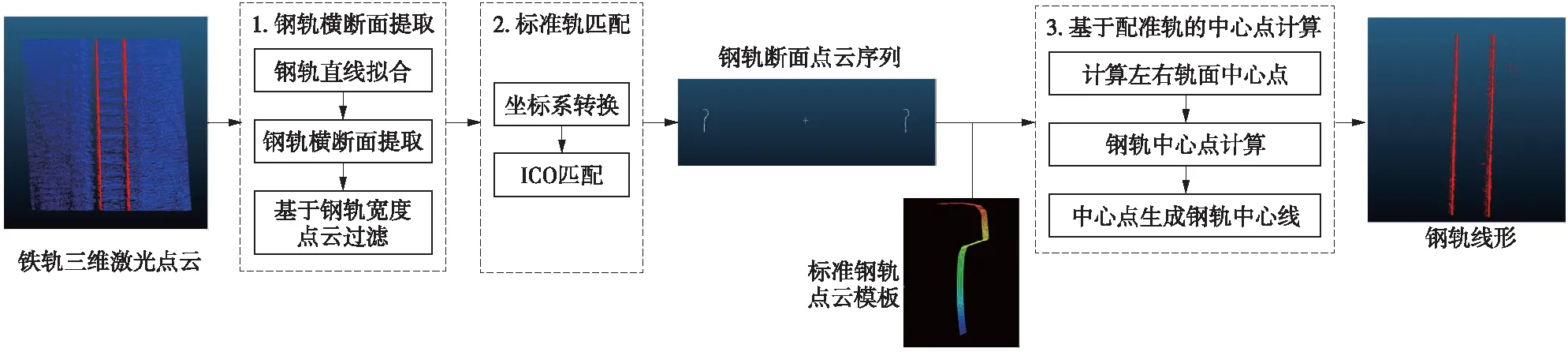
图2 三维激光扫描技术路线
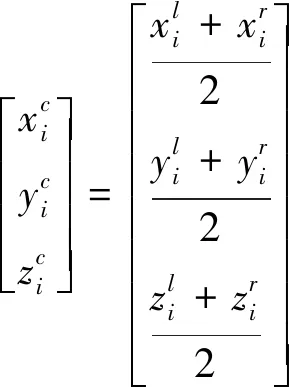
由图2可知,首先,从左右钢轨三维激光点云中按一定间隔提取钢轨断面序列;其次,根据标准钢轨结构信息,构建标准钢轨三维点云模板,再与钢轨断面序列匹配;再次,根据配准的标准钢轨计算左、右钢轨中心线上点的三维坐标;最后,根据轨道中心线与左右轨道中心线关系计算轨道中心线坐标。
2 钢轨断面点云提取
以左右钢轨轨头顶部高程最大值点作为钢轨初始中心线,以初始中心线从左右轨中按照一定的间隔提取钢轨横断面点云,具体步骤如下。
2.1 钢轨初始中心线提取
(1)从左钢轨起始部位开始,选取长度不超过0.1 m的钢轨点云,按照1 cm×1 cm窗口进行遍历,提取轨头顶部高程最大值均值最大窗口,以窗口中心作为高程最大值点,即左钢轨初始中心线第一个点。利用左右轨间距离限制,以左钢轨初始中心线点计算右轨对应初始中线第一个点。
(2)从提取的左右钢轨初始中心线上的第一个点开始,对钢轨对象点云进行分段。因为提取的钢轨初始中心线主要用于钢轨横断面计算,分段间距不需要很密,一般取3~5 m。以第一个点为起点,左右轨同时按照5 m沿钢轨延伸方向,取0.1 m的钢轨点云,按照上述方法确定初始中心线上点。重复执行本步骤,直到钢轨尽头。以中心线里程由小变大的方向作为中心线方向,沿中心线方向进行分段操作。
(3)对左右轨钢轨初始中心线点分段进行直线拟合和验证,剔除不满足相邻三点在一条直线上的中心线点。
(4)取左右钢轨中心点三维坐标均值作为对应分段中心点三维坐标,连接中心点构成钢轨初始中心线。
2.2 钢轨断面点云提取
钢轨断面点云提取包括以下两个步骤。
(1)以左右钢轨初始中心线构建三维缓冲区,从轨道点云中剔除非左右钢轨点云,得到仅包含左右钢轨的点云数据,平面缓冲区以钢轨中心线平行方向设置缓冲区,高程缓冲区以钢轨中心线为顶部,向下设置缓冲区。以60 kg/m钢轨为例, 平面缓冲区大小取标准钢轨轨头宽度为平面缓冲区,即73 mm;高程缓冲区要求包含钢轨腰部,取至钢轨底部,设为136 mm。
(2)根据设置的钢轨断面间距,以左右钢轨初始中心线作为纵线,从左右钢轨点云中取与纵线方向垂直的10 mm厚的点云,得到左右钢轨断面三维点云。图3为按照新方法得到的一个断面左右钢轨点云。

图3 左右钢轨断面点云
3 标准轨匹配
钢轨断面点云与标准轨匹配包括标准钢轨点云模板生成、坐标变换和ICP特征匹配等,具体步骤如下。
3.1 标准钢轨点云模板生成
铁路钢轨形状都采用了抗弯性能极强的工字钢断面。以60 kg/m钢轨为例,选取轨面宽度为45 mm,向下136 mm的部分构建标准钢轨模板,生成厚度为10 mm的三维点云,如图4。

图4 60 kg/m标准钢轨及断面点云模板(单位:mm)
3.2 坐标系转换
标准钢轨点云模板三维坐标原点为(0,0,0)的局部坐标,实际钢轨断面点云坐标系为投影坐标系,在进行点云匹配之前,需将标准钢轨点云平移至待匹配钢轨点云中心附近,以减少坐标原点差异过大引起的匹配迭代收敛速度。
3.3 ICP形状匹配
以钢轨断面点云为目标数据集,将标准钢轨模板与之进行配准。采用迭代最近点匹配算法(ICP)进行点云配准,通过循环迭代选择目标点云数据与参考点云数据对应关系点对,求得平均距离最小的刚体变换参数,对待配准点云数据进行变换,直到迭代计算达到一定次数或对应点平均距离小于给定阈值,有
(1)
式中,Q为目标点云数据集,即钢轨断面点云,P为待配准点云数据集,即标准钢轨点云;n为点对个数,通常以待配准点云进行遍历,寻找其在目标点云中最邻近点作为点对;R为配准旋转参数;T为配准平移参数。
根据迭代收敛后的配准参数R、T,可将标准钢轨点云变换到与钢轨断面点云配准后坐标系中,得到配准后的标准钢轨点云数据P,有
P′=QR-1-T-P
(2)
3.4 钢轨中心线坐标提取

4 轨道中线计算

(3)
5 结果分析
5.1 实验数据集
选取汉十高铁枣阳段作为实验区间,采用Rigel VZ400地面三维激光扫描按照不同的设站间隔、扫描角度间隔获取不同密度的三维激光点云(见表1),各站激光点云都采用标靶拼接,拼接内符合精度均优于2 mm,共三组数据集,如图5。
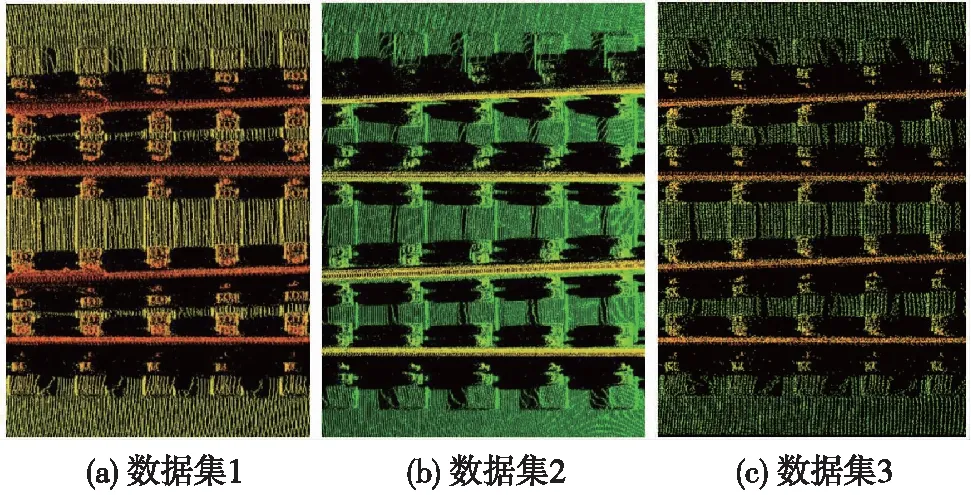
图5 三维坐标实验数据集

表1 实验数据集规格
使用全站仪和水准仪按照传统的线路勘测技术规范测量轨道中线坐标,中线按照5 m的间隔给出对应点的三维坐标,以验证新方法的精度。
5.2 轨道中线提取结果及精度分析
图6为采用新方法提取的左右轨中心线及轨道中线结果。

图6 轨道中线提取结果
由图6可知,新方法能够取得稳健的轨道中心线结果,与传统勘测手段测量的中心线高程进行对比,其误差分布如图7。
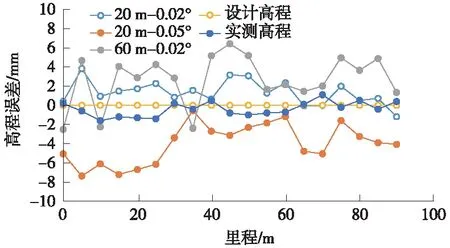
图7 轨道中线高程误差
由图7可知,20 m设站间距高程精度高于60 m设站间距,且扫描角度间隔越小,点云密度越高,高程精度越高。
直线段落的标准轨道轨距为1 435 mm,60 kg/m钢轨顶部宽度为73 mm,左右轨间距为1 508 mm,轨距误差分布如图8。分别统计轨距中误差和轨顶高程中误差,结果如表2。
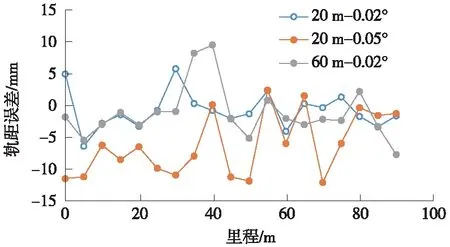
图8 轨距误差

表2 数据集提取结果精度 mm
由表2可知,在20 m设站间距、扫描角度0.02°情况下,轨距中误差小于2 mm,中心线高程中误差小于2 mm;在60 m设站间距、扫描角度0.02°情况下,轨距中误差小于3 mm,中心线高程中误差小于3 mm;在20 m设站、扫描角度0.05°情况下,轨距中误差小于4 mm,中心线高程中误差小于4 mm。由此可见,中心线提取结果受到设站间距影响,设站间距越小,点云密度越高,精度越高。
6 结论
传统的铁路既有中线测量为接触式测量,耗时长,效率低,对铁路正常运营干扰较大。三维激光扫描技术可以有效缩短测量时间,提高效率,降低对铁路正常运营的影响,满足铁路测量的高效率、高精度要求。针对地面三维激光扫描入射角限制以及不同视角遮挡现象造成部分轨道点云缺失等问题,利用标准钢轨结构信息严密匹配,解决实际钢轨点云中特征缺失或不够的问题,提高钢轨中心线提取精度,为基于三维激光扫描技术的既有线勘测和维护提供了技术保障,具有广泛的应用前景。
