陀螺全站仪在复杂山区特长隧道定向中的应用研究
2021-03-10杜志刚
杜志刚
(中铁隧道局集团有限公司,广州 511458)
陀螺全站仪是一种集陀螺仪与全站仪于一体的定向测量仪器,它利用陀螺仪的定轴性和进动性,在地球自转基础上能实现自动寻北并测定目标点的真北方向。在隧道、矿井、洞室等GPS技术失效的情况下,陀螺定向测量可实现自动寻北,具有巨大的技术优势和应用前景。目前,高精度陀螺仪可以在南北纬80°以内实现全天候自主测量,定向精度最高可达±3.22″[1]。TB10101—2018《铁路工程测量规范》中规定:“隧道单向掘进每隔5 km左右宜采用不低于5″级的陀螺仪加测陀螺定向边”[2]。王涛等对输水隧洞、高铁隧道、地铁区间进行了陀螺定向研究,认为陀螺定向测量能对隧道等地下工程的导线方位进行有效检核和修正[3-5];王飞等对陀螺定向误差影响因素、精度评定、温度补偿模型进行研究,并提出相应解决方案和应对措施[6-8];时丕旭对高精度陀螺仪在超长铁路隧道贯通误差预计中的应用进行研究[9]。以往研究多侧重于陀螺仪应用及性能、精度等,对提高陀螺定向精度具有指导意义。然而,陀螺全站仪一般体积较大,在复杂艰难山区作业时存在迁站难度大,架设不便、易受外界影响等缺点。因此,探索陀螺全站仪自由设站法具有重要意义。
1 陀螺全站仪自由设站法
若陀螺全站仪仅整平不对中,在两个已知控制点均架设棱镜,仪器在待测边一定范围内交通便利、地基稳定的位置设站,分别进行陀螺定向和边角测量,采用解三角形可计算陀螺方位角并推算坐标方位角。陀螺全站仪在P点设站,两个测量控制点均架设棱镜,a、b、c为边长,A、B、C为内角,如图1所示。

图1 陀螺全站仪自由设站测量作业示意
根据全站仪观测平距b、c和水平夹角值A,计算第三边a、内角B和C,见式(1)~式(3)。根据b、c边陀螺定向观测值,结合角度B、C可分别从顺时针、逆时针方向推算待测边a陀螺方位角[10],见式(4)、式(5)。

(1)

(2)

(3)
Na=Nc±1800+B
(4)
Na=Nb±1800-C
(5)
式中,Na、Nb、Nc分别为a、b、c边陀螺方位角。对式(2)、式(3)进行全微积分,角度B和C中误差见式(6)、式(7)。
(6)
(7)
式中,mA为角度A中误差;a、b为观测平距;A、B、C为三角形内角。
2 计算方法
2.1 子午线收敛角
子午线收敛角即坐标纵线偏角,真北方向与坐标北的夹角为子午线收敛角[11]。子午线收敛角有正负之分,中央子午线以东为正,以西为负。一个投影带内,在中央子午线上或赤道线上子午线收敛角为0,距离中午子午线和赤道越远越大。当经差小于3.5°时,精度为±0.001″,子午线收敛角γ见式(8)[12-16]。
γ=sinB1×l
(8)
式中,B1为测站点纬度;l为测站点与中央子午线经差。
2.2 待测边坐标方位角
仪器常数是陀螺轴稳定位置的子午面与地面的交线和真子午线的夹角[13],一般以e表示,一个测区、一定温度范围内仪器常数基本不变。地面基准边与地下待测边的坐标方位角、陀螺方位角、子午线收敛角、仪器常数之间关系分别见式(9)、式(10) 。在隧道等地下工程的陀螺定向过程中,仪器常数e经过检核稳定后,可将式(9)、式(10)合并,地下待测边坐标方位角计算见式(11)。
T地面=N地面-γ地面+e
(9)
T地下=N地下-γ地下+e
(10)
T地下=T地面+(N地下-N地面)-(γ地下-γ地面)
(11)
式中,T地面、T地下为地面基准边、地下待测边坐标方位角;N地面、N地下为地面基准边、地下待测边陀螺方位角;γ地面、γ地下为地面、地下设站点子午线收敛角;e为仪器常数。
2.3 精度评定
陀螺全站仪自由设站法作业时,地面基准边中误差、陀螺定向观测中误差、角度B和C中误差的大小决定了地下陀螺边坐标方位角中误差。陀螺定向观测中误差见式(12),根据误差传播定律,地下待测边坐标方位角中误差见式(13)。
(12)

(13)
3 工程案例
3.1 工程概况
格尔木至库尔勒铁路阿尔金山特长隧道位于新疆维吾尔自治区若羌县境内,全长13.195 km,隧道进口段33.92 m和出口段429.84 m位于R=800 m的曲线上,其余均位于直线上。中央子午线经度90°30′,投影面大地高3 170 m。隧道设置两座斜井+出口平导,其中,1号斜井长478 m,进隧道正洞边长86.2472 m;2号斜井长1 872 m,进隧道正洞边长57.938 2 m;隧道出口平导长4 133 m,与正洞横向间距30 m,设10个横通道连接正洞,其中,1号横通道进正洞边长38.287 3 m,2号斜井和出口平导均属于短边进洞,如图2所示。
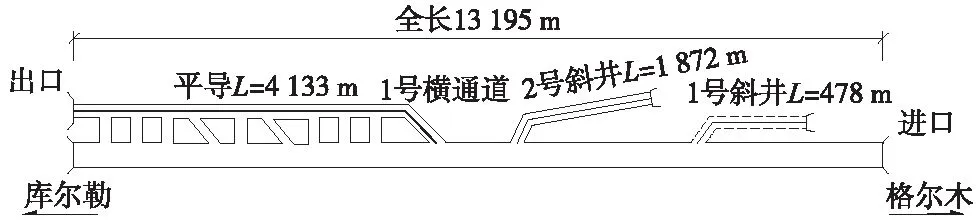
图2 阿尔金山特长隧道布置
3.2 施测仪器与方法
采用BTJ-3型全自动陀螺仪标称定向精度为±3.6″,配套徕卡全站仪TS15标称测角精度为±1″,测距精度为±(1 mm+1.5 ppm)。观测方法:地面基准边测量、地下待测边测量与复核、地面基准边复核。每测站陀螺定向和边角测量均不少于6测回,各测回陀螺定向值互差不大于标称精度的3倍,即10.8″。全站仪边角测量按照二等导线精度标准实施。
3.3 陀螺定向测量
选取CPI24→CPI27为地面基准边,该边方位角中误差±0.4″,点对间距599.927 4 m。地下选取DL1→DL2为待测边,点对间距306.254 3 m。陀螺全站仪在待测边一定范围内设站,分别进行陀螺定向测量和边角测量,观测数据及计算见表1~表3。

表1 地面基准边陀螺方位角计算
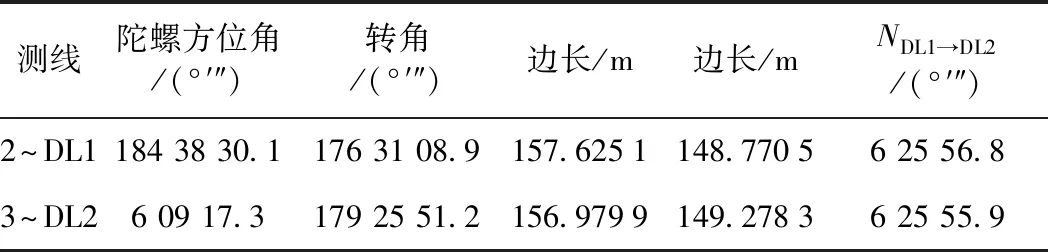
表2 地下待测边陀螺方位角计算

表3 地面基准边复核
表2中,地下待测边DL1→DL2陀螺方位角两次独立定向值较差0.9″,表3与表1中计算的仪器常数较差2.1″,可验证陀螺全站仪常数的稳定性。
3.4 坐标方位角计算
地面点CPI24、地下点DL1经纬度分别为(90°39′32.5″,38°41′44.4″)、(90°40′03.9″,38°42′48.5″),两者均位于中央子午线以东,与中央子午线经差分别为0°09′32.5″、0°10′03.9″,经差均小于3.5°,采用式(8)计算子午线收敛角,分别为0°05′57.9″、0°06′17.7″,采用式(11)推算地下待测边坐标方位角,结果见表4。

表4 地下待测边坐标方位角计算
3.5 数据融合处理
阿尔金山隧道洞内布设直伸型导线网,每4~6条边形成独立闭合环。本次导线测量长度约3.73 km,地下导线测量边DL1→DL2坐标方位角为6°31′49.7″,方位中误差为± 7.5″。采用式(6)、式(7)计算角度B、C中误差分别为mB=±0.2″、mC=±0.2″,采用式(12)计算陀螺全站仪观测误差,mN=±3.3″;结合基准边方位角中误差,采用式(13)计算地下待测边坐标方位角中误差,mT地下=±3.3″。依据导线测量边和陀螺边方位角中误差进行加权平均,导线边方位角权取1,陀螺边坐标方位角权取2。阿尔金山隧道地下陀螺边加权平均方位角为6°31′52.2″,将该加权平均值作为约束方位,融入导线网进行联合平差,采用联合平差成果指导后续施工测量。
4 对比分析
4.1 设站精度对比分析
传统陀螺定向作业法对中误差为1~2 mm,案例中,地面基准边长599.927 4 m、地下待测边长306.254 3 m,对中误差取1 mm,采用式(14)计算,陀螺全站仪对中误差对地面基准边影响为±0.34″,对地下待测边影响为±0.67″。
(14)
式中,d为对中误差;s为边长;ρ=206 265″。
自由设站法消除了仪器对中误差,增加了全站仪边角测量误差。以表1数据为例,测角中误差取±0.5″,经计算,地面基准边B、C角度中误差为mB地面=±0.25″、mC地面=±0.25″;地下待测边B、C角度中误差为mB地下=±0.24″、mC地下=±0.26″。对比分析可知,仪器对中误差大于全站仪边角测量误差。由此可见,与传统陀螺定向作业法相比,自由设站法测量精度较高。
4.2 定向值及工效对比分析
采用传统陀螺定向法分别在地面CPI24、CPI27和地下DL1、DL2测点架设仪器,每测站独立测量6测回,每条陀螺边共计12测回,地面基准边外业用时约270 min,地下待测边外业用时约190 min,共计460 min。地面基准边和地下待测边陀螺定向观测值分别为175°21′15.3″、6°25′55.6″,推算地下待测边DL1→DL2坐标方位角为6°31′51.7″。自由设站法在待测边一定范围内任意位置设站,每测站独立进行6测回陀螺定向测量和边角测量,每边共计12测回,地面基准边外业用时约215 min,地下待测边外业用时175 min,合计用时约390 min。地面基准边和地下待测边陀螺定向观测值分别为175°21′14.2″、6°25′56.3″,地下待测边DL1→DL2坐标方位角为6°31′53.5″,对比情况见表5。
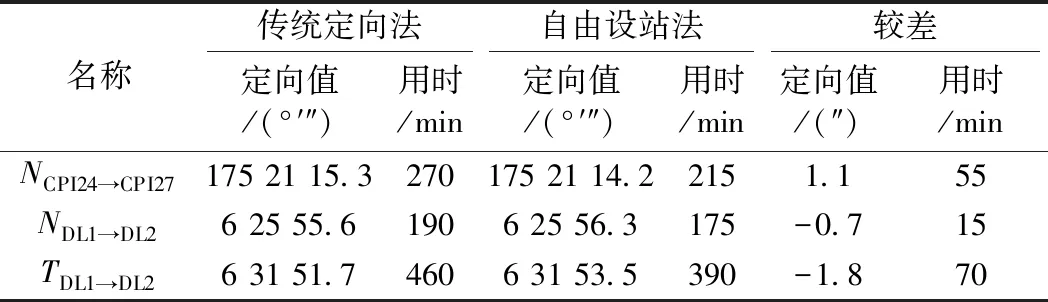
表5 定向值对比分析
由表5可知,同等条件下两者定向成果差异较小;地下平坦地区作业时,两者作业用时相当;在复杂艰难山区作业时,自由设站法省去了多次搬运仪器和对中操作,用时较短,具有工效高、劳动强度低等优点。
4.3 贯通测量对比分析
2019年11月19日阿尔金山隧道贯通,采用徕卡TM50型全站仪进行贯通测量,同时联测了贯通面附近大、小里程陀螺定向边。计算表明:传统定向法横向贯通误差为+14.3 mm,方位较差为0°0′5.6″;自由设站法横向贯通误差为+8.2 mm,方位较差为0°0′3.5″。因此,自由设站法定向成果贯通误差小,其定向精度更高。
5 结论
(1)自由设站法可在一定范围内任意位置设站,外业灵活性强,有效解决作业过程中仪器搬运难题,在复杂艰难山区作业时具有设站位置灵活、工效高等明显优点。
(2)自由设站法简化仪器操作并缩短架设时间,内业计算简单、检核条件多,可及时发现粗差并进行补测,具有实用性和便利性。
(3)自由设站法消除了仪器对中误差,虽增加了全站仪边角测量误差,与传统作业对中方法相比,自由设站法设站精度更高。
(4)在陀螺定向作业过程中可编辑一体化数据处理终端,实现已知数据录入和编辑,子午线收敛角、仪器常数和方位角自动计算、检核等功能,提高内业数据处理一体化、自动化和智能化水平。
