操纵杆角位移测量装置的设计
2021-03-09刘闯韩嘉骅张宁宁赵志远
刘闯,韩嘉骅,张宁宁,赵志远
操纵杆角位移测量装置的设计
刘闯,韩嘉骅,张宁宁,赵志远
(四川大学 机械工程学院,四川 成都 610065)
为克服操纵杆接触式角度传感器带来的机械磨损从而影响输出特性的缺陷,采用TDK-Micronas公司最新款的磁传感器编程器TDK MSP V1.0为软件开发平台,以HAL 3725霍尔芯片设计出一种非接触式角度霍尔传感器。通过对传感器芯片的选型,传感器模型与标定实验平台的搭建,硬件电路的设计以及编程器对传感器标定的软件流程控制,最终经过实验测试采集出传感器数字信号。实验结果表明:与接触式传感器相比信号波动小,更加灵敏,减少机械磨损,从而实现非接触式角度传感器的设计。
操纵杆;HAL 37xy;非接触式;传感器标定
操纵杆作为一种重要的人机交互接口,已广泛应用于汽车、生产自控、船舶、军工等众多领域,而角度传感器是操纵杆中重要的感知器件[1]。传统操纵杆主要由普通电位计和机械部件直接接触,在诸如剧烈震动和极端温度等条件工作环境中,由于电位计的机械磨损会逐渐导致误差增大,缩短生命周期影响角度传感器的输出特性[2]。那么非接触特性就显得至关重要,本文通过对HAL 37xy系列霍尔芯片的研究,设计一款可以取代普通电位计的非接触式霍尔角度传感器[3-5]。主要原理通过对HAL 37xy霍尔芯片施加偏置电压以及磁场,取得与磁场成比例的电信号,从而实现非接触式传感器的测量定位[4,6-7]。
1 HAL 37xy系列霍尔芯片的选择
HAL 37xy系列霍尔芯片是由德国的著名的TDK-Micronas公司基于Micronas的3D HAL(R)技术而开发的第二代用于测量线性位移以及旋转角度的霍尔元件,与第一代用于测量线性位移以及旋转角度的霍尔元件相比,第二代霍尔元件具有更加完善的线性位移和角度测量性能,其线性测量误差降低25%,而其角度测量误差更是降低30%有余。基于Micronas 3D HAL(R)技术的先进性,第二代霍尔芯片可以在低至±20 mT的磁场环境中工作,并且其在特定的温度范围内具有良好的漂移表现。如图1所示为HAL 37xy霍尔芯片实物图[8]。
图1 HAL 37xy霍尔元件
传统的平面霍尔技术仅对正交于霍尔芯片表面的磁场敏感,除了正交磁场外,HAL 37xy对平行于霍尔芯片表面施加的磁场也很敏感。通过将垂直于霍尔板集成到标准CMOS工艺中,使得三个磁场分量B、B和B成为可能。其通过测量磁场的正弦和余弦分量来捕获磁场矢量,这为各种位置检测提供了一种潜在的应用程式,例如线性位移、旋转角度、通轴角度测量等。
HAL 37xy系列霍尔芯片包括三个子系列,其中HAL 371x和HAL 372x可提供一个12位比例线性模拟信号输出模式,并且带有上拉或下拉电阻器的集成断线检测功能。与HAL 372x相比较,HAL 371x系列霍尔芯片将360°测量范围分成四个重复的90°(MOD 90°)或三个120°(MOD 120°)段。而HAL 373x系列霍尔芯片具有数字输出模式,包括PWM模式和SENT模式,数字输出模式是可编程的,PWM模式输出可配置为0.2~2.0 kHz之间的频率,最高分辨率为12位。根据操纵手柄的应用需求,主要是用来代替普通接触式电位器或者编码器。故选择模拟量输出,且不需要测量角度模数的选择,因此对于操纵手柄而言最合适的芯片就是HAL 372x系列芯片。
要实现角度测量,如图2所示为轴端或轴侧装配方案测量0~360°角度的装配方式,轴端装配的方案更适合操控手柄的角位移测量,对于轴端装配方案,可测量的磁场分量为B和B,因此最终确定选择型号为HAL3725的霍尔芯片。
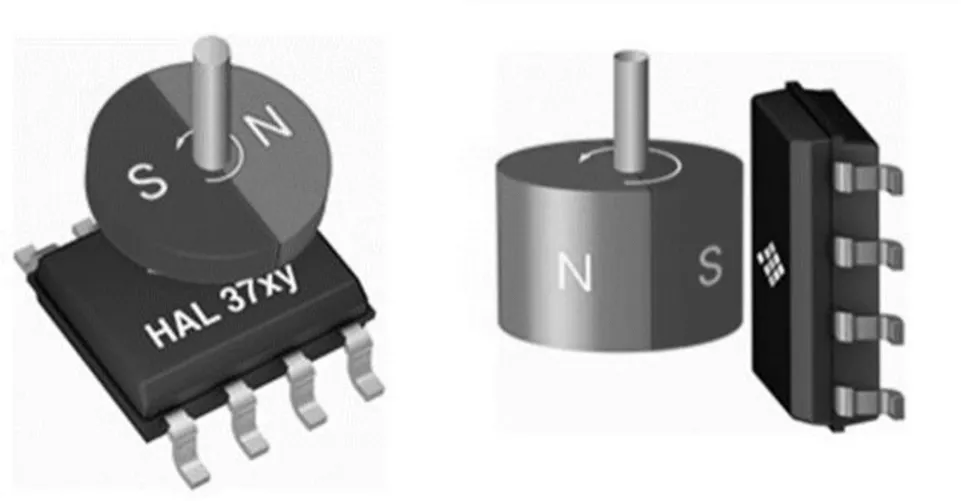
图2 装配方案
片上信号处理根据两个磁场分量计算角度,并将该值转化为输出信号。由于采用了先进的3D HAL技术,该芯片在规定的温度范围内具有出色的漂移特性,从而为角度的测量提供了更高的精度等级。除了内置信号处理器外,其还具有任意可编程的线性特性,可对输出信号进行线性化(最多可设33个设定点)也就是不但在0~360°,可输出0~5 V的模拟信号,也可以通过编程在其他角度范围(例如0~120°),输出电压百分比仍为100%。
2 霍尔角度传感器标定模型搭建及硬件设计
在对传感器进行编程之前,根据实际情况的需求,建立一个传感器简化模型,这样便于对传感器进行编程,然后设计以及绘制霍尔芯片的外围电路,并进行PCB设计,打样制板,实物制作出来后,就可以进行传感器的编程及标定。
2.1 传感器机械模型的搭建
利用三维绘图软件根据轴端装配模式,设计了结构模型如图3所示,底层板和上层板尺寸均为30 mm×30 mm,霍尔芯片居中,磁钢位置也是居中,磁钢被嵌入在旋冒中,旋冒可以轻松旋转,气隙(磁钢中心到霍尔芯片表面中心的垂直距离)为=4±0.1 mm,当然也可以通过调整螺栓改变气隙高度。
2.2 霍尔传感器硬件设计

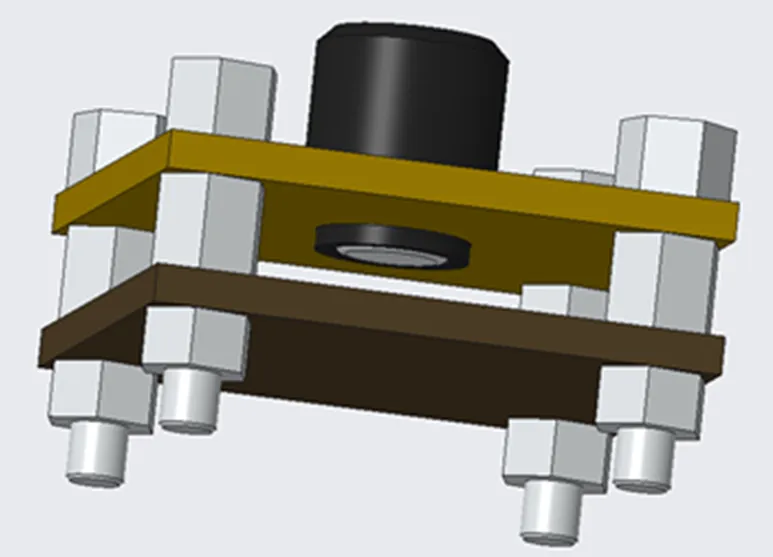
图3 HAL 37xy内部结构框图
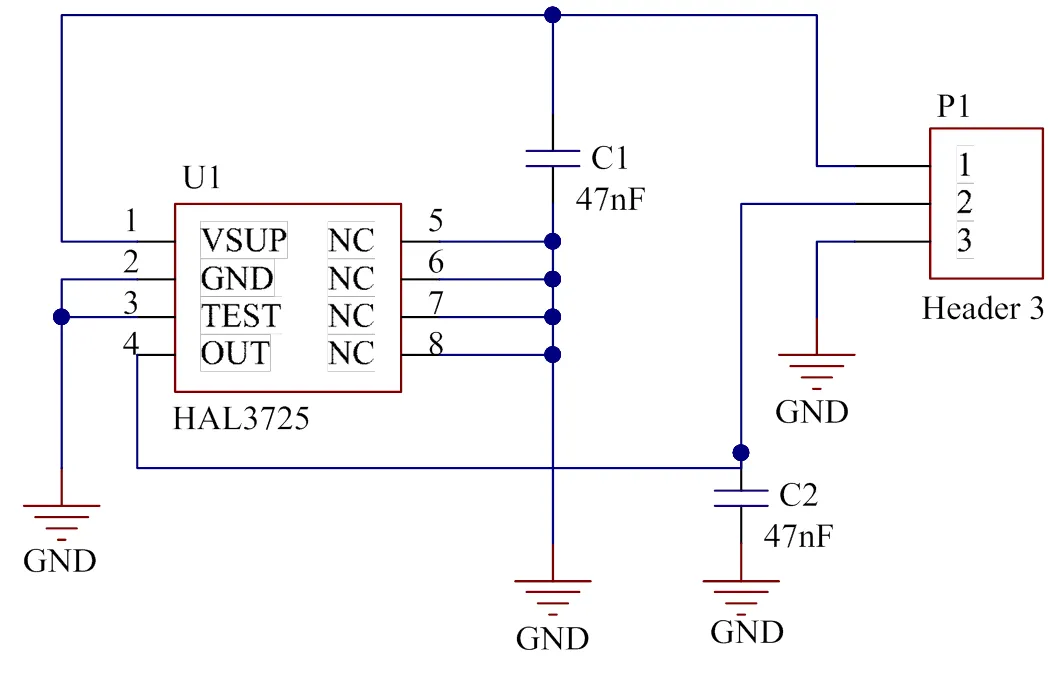
图4 HAL 3725外围电路
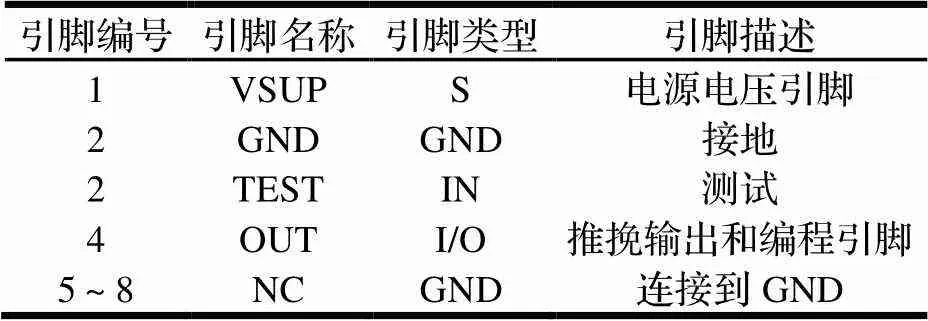
表1 HAL 3725引脚描述
在进行PCB设计时,PCB布局相对简单,因为这里只有一个芯片、两个陶瓷电容,仅仅需要尽量让两个电容靠近引脚即可,最重要的是霍尔芯片的位置上,必须居中,输出焊盘大小均匀即可,然后就是PCB的布线,这里主要注意的是,尽量避免直角走线和锐角走线,一般情况下直角和锐角走线会使得传输线的线宽产生变化,造成其阻抗的不连续。
3 霍尔角度传感器的编程与校准
霍尔角度传感器的编程,这里的编程并非传统意义的编程,并不需要写代码,而是利用特定的编程器,进行程序的标定,主要是对其内置信号处理的可编程寄存器进行编码校准,包括可编程一阶低通滤波器、可编程输出增益和失调、可编程输出钳位(用于误差带定义)、可编程参考位置、可编程磁检测范围等,通过对非易失性存储器进行编程。除内置信号处理外,该传感器还具有任意可编程的线性特性,可对输出信号进行线性化(最多33个设定点)。
HAL 3725霍尔芯片可实现任意角度的满量程输出,这里对0~360°的满量程输出进行编程,HAL 37xy系列霍尔芯片具有两种不同的操作模式。在应用模式下,传感器提供比例模拟输出电压或数字输出信号(PWM或SENT)。在编程模式下,可以更改传感器的寄存器设置。上电后传感器始终在应用模式下运行。通过传感器输出引脚上的脉冲将其切换到编程模式。
在编程模式下,HAL 3725霍尔芯片一般通过调节传感器输出引脚上的串行报文来寻址。如图5所示,将逻辑“0”编码定义为在位时间内没有电平变化,把逻辑“1”编码定义为通常占位时间的50%的电平变化。而每一位时间之后,都会发生电平变化。
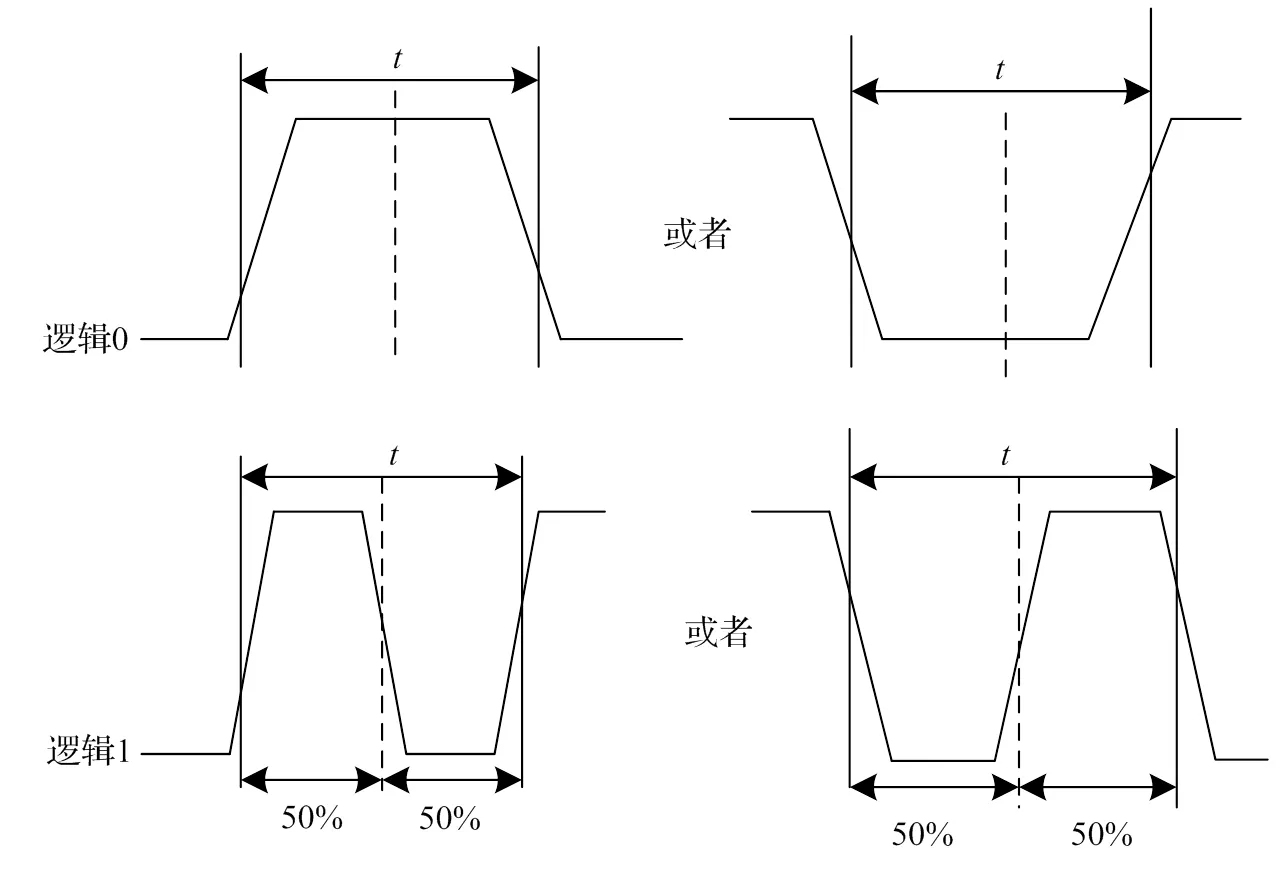
图5 霍尔传感器逻辑图
对于生产和鉴定测试,必须在对HAL 3725进行最终调整和编程之后,将LOCK位设置为1,将POUT位设置为零。在锁定芯片存储器之前,需要校验所有寄存器值,以确保将目标数据正确存储在传感器的存储器中。锁定过程是否成功应通过锁定后读取LOCK位的状态来检查。
3.1 霍尔芯片信号路径分析
HAL 37xy的信号路径详细信息如图6所示,DSP部分主要进行信号调节,其参数存储在EEPROM中,霍尔芯片信号路径包含两种寄存器,只读寄存器(RAM)和可编程寄存器(EEPROM),只读寄存器包含信号路径中某些步骤的测量数据,而可编程寄存器主要是信号处理方面,对传感器进行标定时有相关应用。这里对只读寄存器进行说明,其中TADJ寄存器内置结温度的数字值,它的长度为16位,并且是二进制编码的,0~32767之间的范围用于温度信息,通常温度传感器的校准方式是在-40℃时寄存器值为100LSB,在160℃时寄存器值为1200LSB。

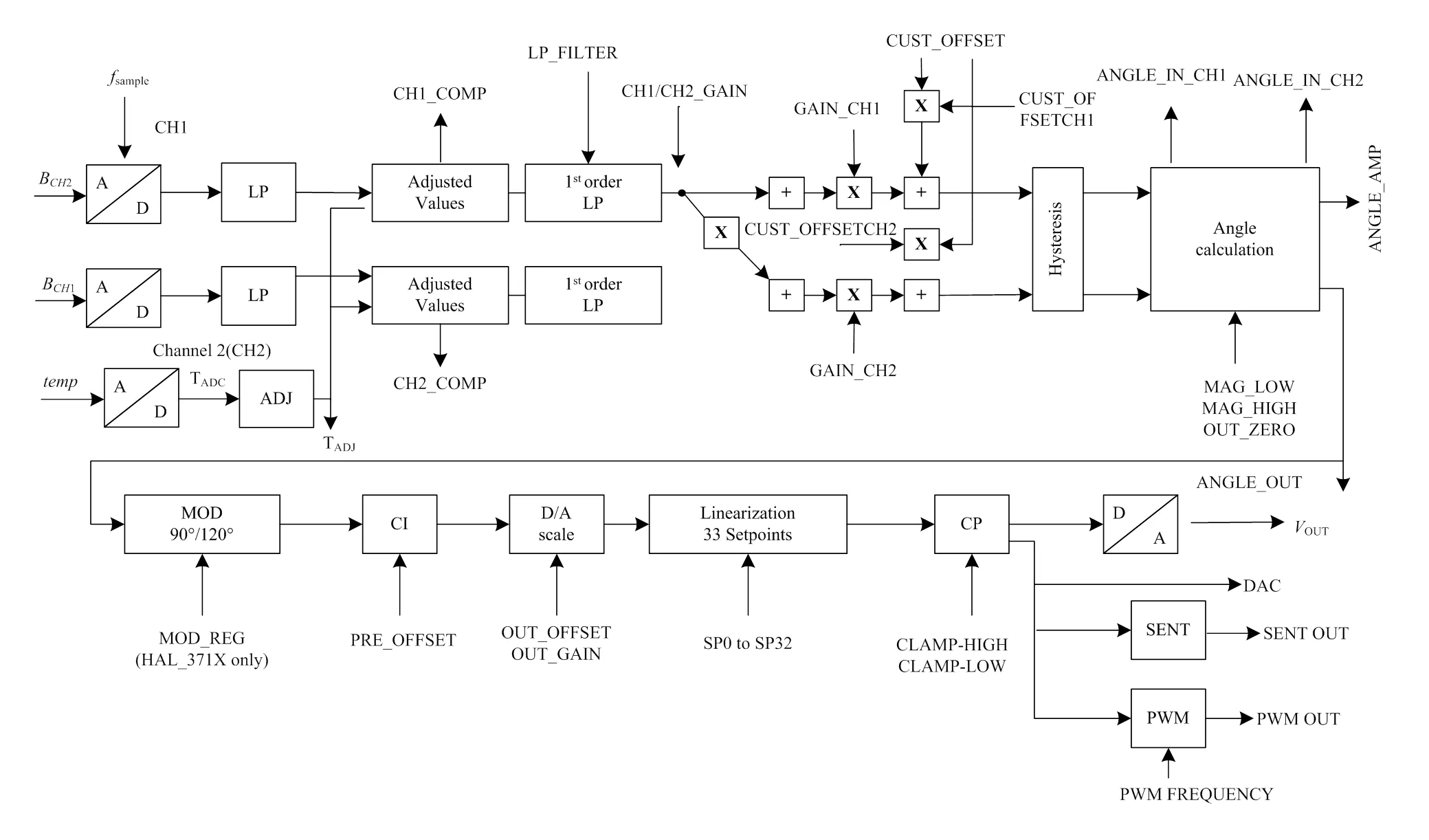
图6 HAL 37xy内部信号路径[8]
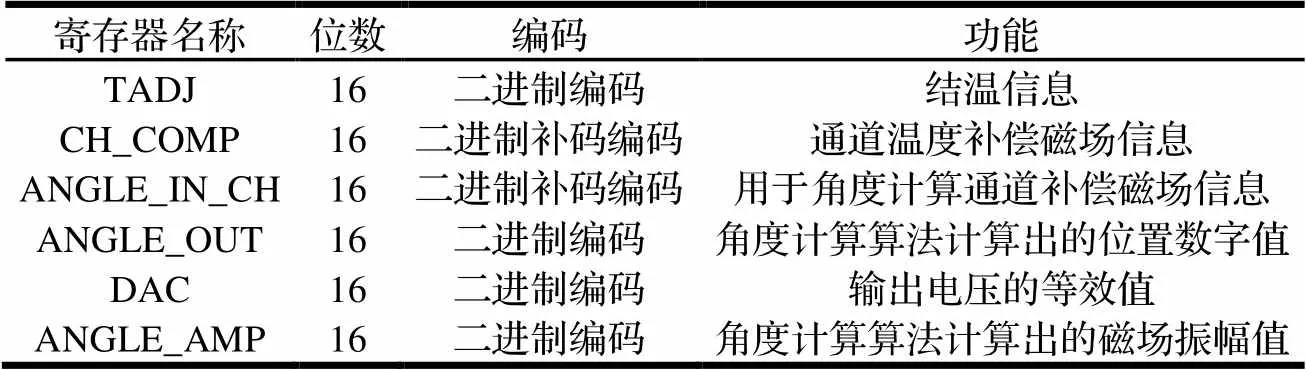
表2 寄存器说明1
其中,ANGLE_AMP寄存器中的磁场振幅值,理论上,是根据通道1和通道2中的磁场分量计算出的,其计算式如下:

式中:1为通道1磁场分量,mT;2为通道2磁场分量,mT。
然而实际上,磁场振幅方程式增加了大约1.6倍,因此最终计算式为:

OUT_ZERO定义角度输出的参考位置,它可以设置为输出范围的任何值。它是33个设定点的起点/参考点。其次,该角度可用于将角度计算的PI不连续点移动到所需角度范围的最大距离,以避免由于噪声而导致输出360°环绕。
表3中,OUT_GAIN定义输出信号的增益。寄存器的长度为16位,并采用二进制补码编码。OUT_GAIN=1是中性设置,并且当角度从0°变化到360°时,输出信号从0%变化到100%(如果OUT_OFFSET设置为0)。OUT_GAIN可以在-64和64之间变化。钳位CLAMP_LOW和CLAMP_HIGH定义模拟输出的最大和最小输出电压。CLAMP可用于定义传感器输出的诊断范围。两个寄存器的位长度都是16位,并且都二进制补码编码。CLAMP_LOW和CLAMP_HIGH的值都可以在满量程的0%~100%之间。
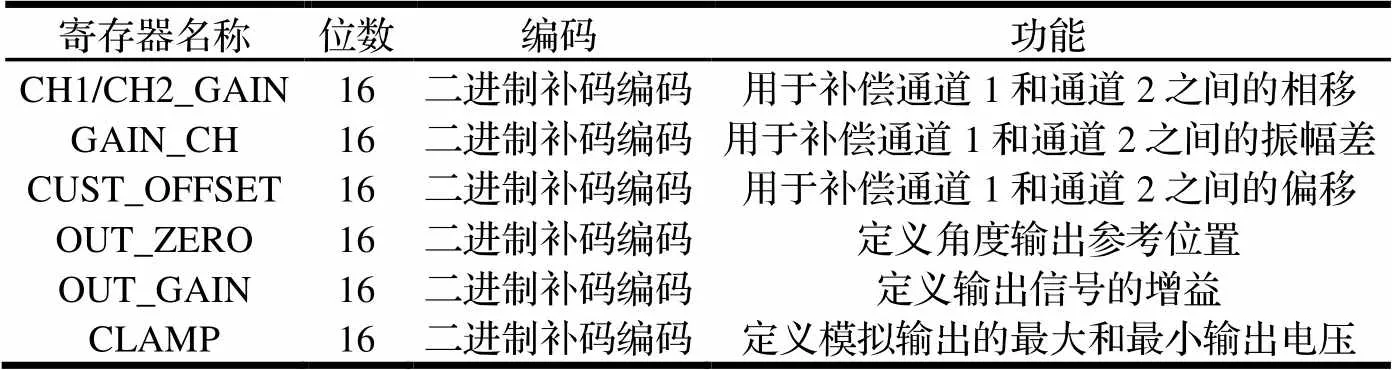
表3 寄存器说明2
3.2 霍尔芯片程序的编写及校准
为了对HAL 3725霍尔芯片进行编程,一般需要硬件和软件的编程工具。针对本校准实验利用SolidWorks软件建模,搭建校准实验平台如图7所示。
编程工具则选用新一代磁传感器编程器TDK MSP V1.0,它是TDK-Micronas公司开发的完整的编程工具,集成了LabView编程环境,只要根据需要,校准相关寄存器参数即可,相当方便,可大大缩短开发时间,软件设计流程如图8所示。
如图9所示,标号①这里是根据起始点位置的磁场强度得到的ADC值,一般情况下此值不要太接近饱和值,以免芯片处于饱和磁场下。标号②这里一般将磁铁旋转至输出起始位置,点击此按钮。标号⑥与标号②正好对应,将磁铁旋转至输出的终止位置,点击此按钮。标号⑦和标号①相对应,是根据终止点位置的磁场强度得到的ADC值,此值亦不要太接近饱和值。标号③是根据设计要求设置传感器的起始点的输出电压值,相对应的标号⑧是根据设计要求设置传感器的终止点的输出电压值。标号④所指的是在两个极限位置(起始点和终止点)的数据获得后,点击此按钮,得到Sensitivity和Voq两个参数值,其中标号⑤指的是点击此按钮将参数写入芯片的存储器中,标号⑨指的是锁定按钮,如果测试合格,可以将芯片锁住,芯片锁住后不能再进行读写操作。以上步骤,就是HAL3725霍尔芯片的标定过程,接着就可以对输出信号进行测试。
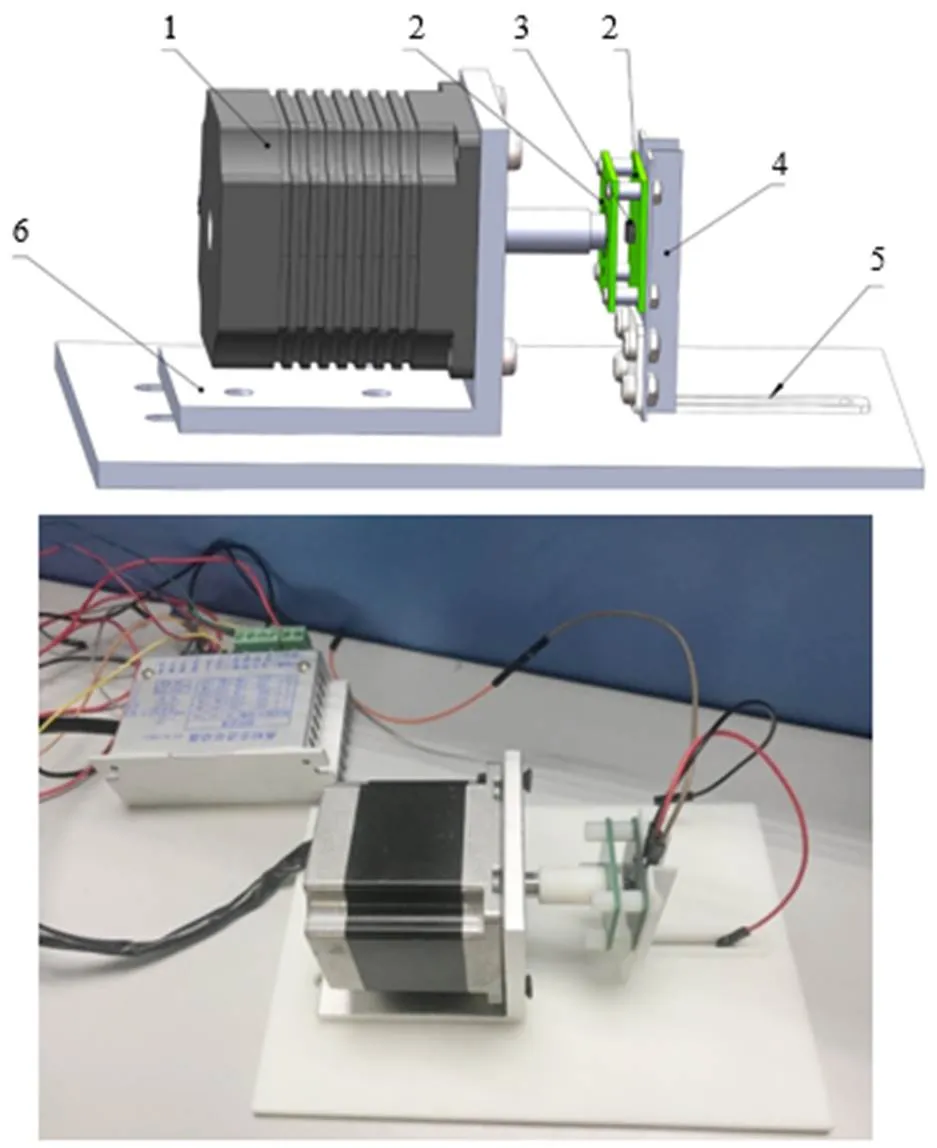
1.步进电机 2.PCB板 3.HAL 3725芯片 4.支架1 5.底座 6.支架2
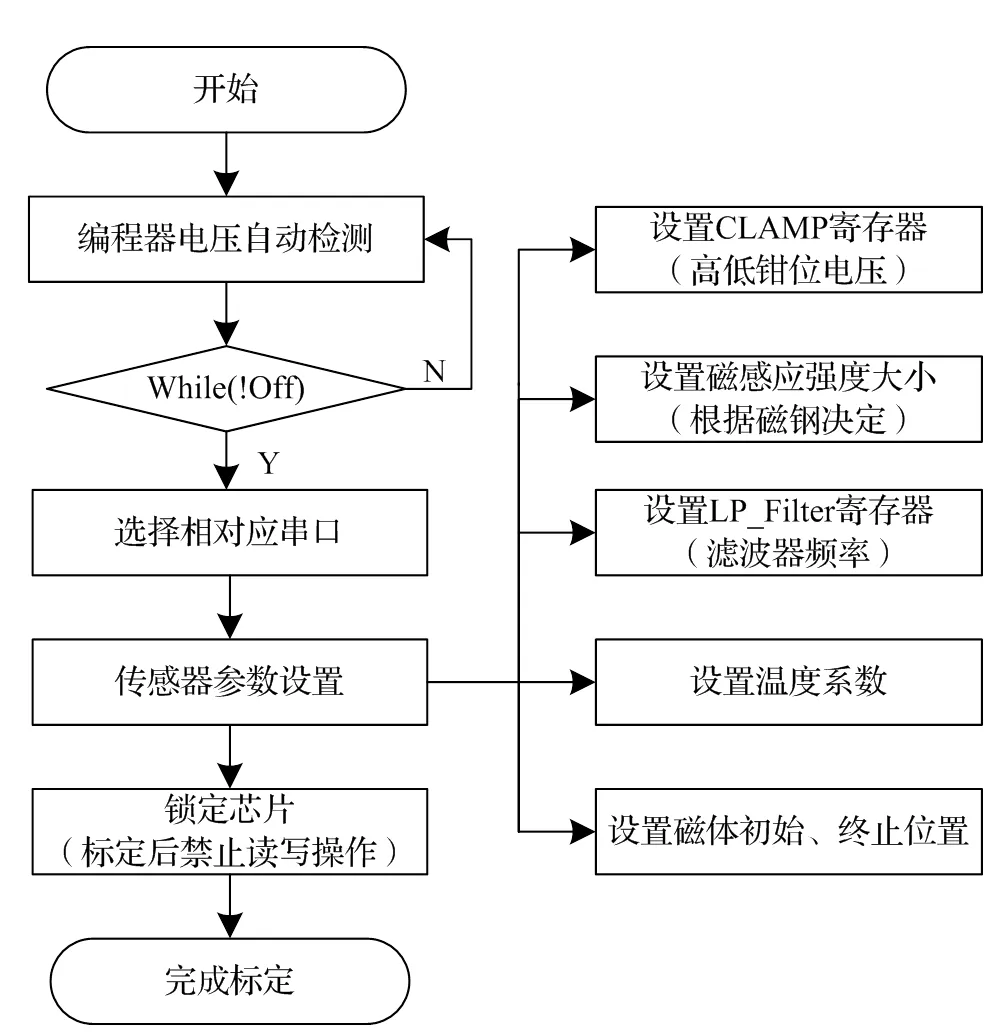
图8 霍尔传感器标定软件设计流程图
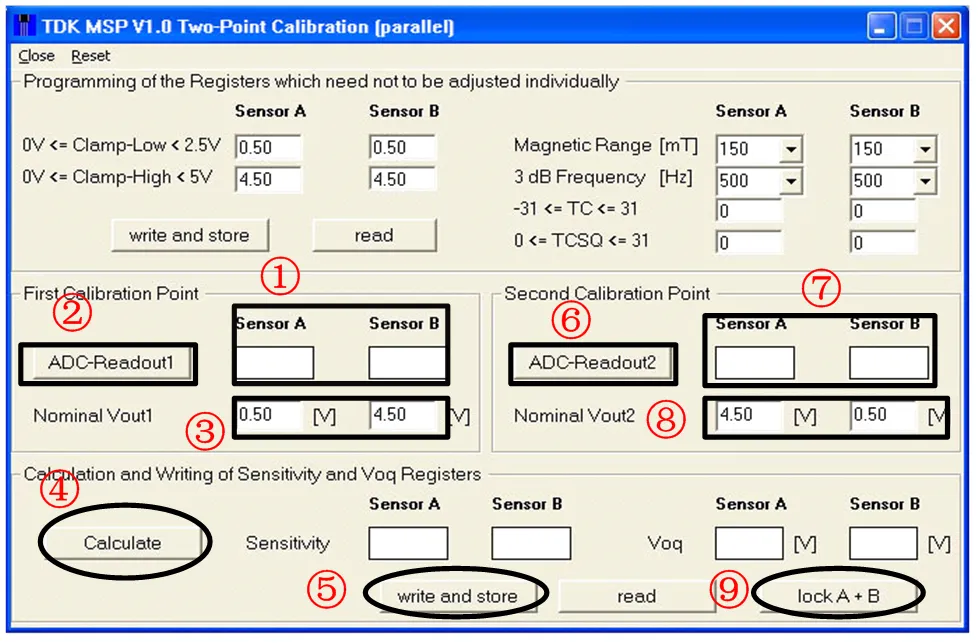
图9 编程器标定界面
4 霍尔传感器的数据采集
对于本文设计的霍尔传感器主要应用于车辆操纵杆中,数据采集则使用STM32F103为微处理器,带有USB串口,CAN通信模块及4路12位分辨率AD转换模块的控制板。如图10所示将霍尔传感器的三个引脚分别用杜邦线连接在控制板的5 V,GND及AD输出引脚上。由于STM32F103微控制器只识别模拟电压3.3 V,则在设计AD电路过程中将其用电阻分压,便可输入5 V模拟电压[9]。通过对步进电机旋转角度的控制,带动磁铁旋转,则霍尔传感器会产生持续的电信号通过AD转换模块传输到微控制器中,转换成STM32F103可识别的数字信号,最终通过与PC端相连接采集出霍尔传感器数字信号[10]。
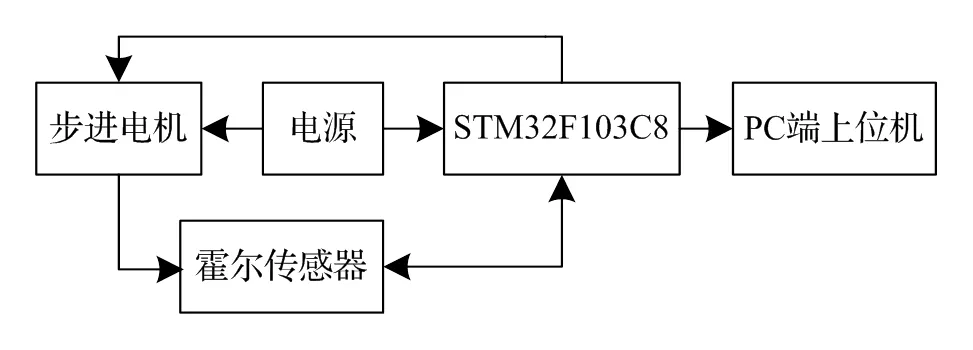
图10 数据采集实验框图
5 结论
通过进行实际测试,获得普通电位计与本次标定的霍尔角度传感器初始数据图像,如图11、图12所示。
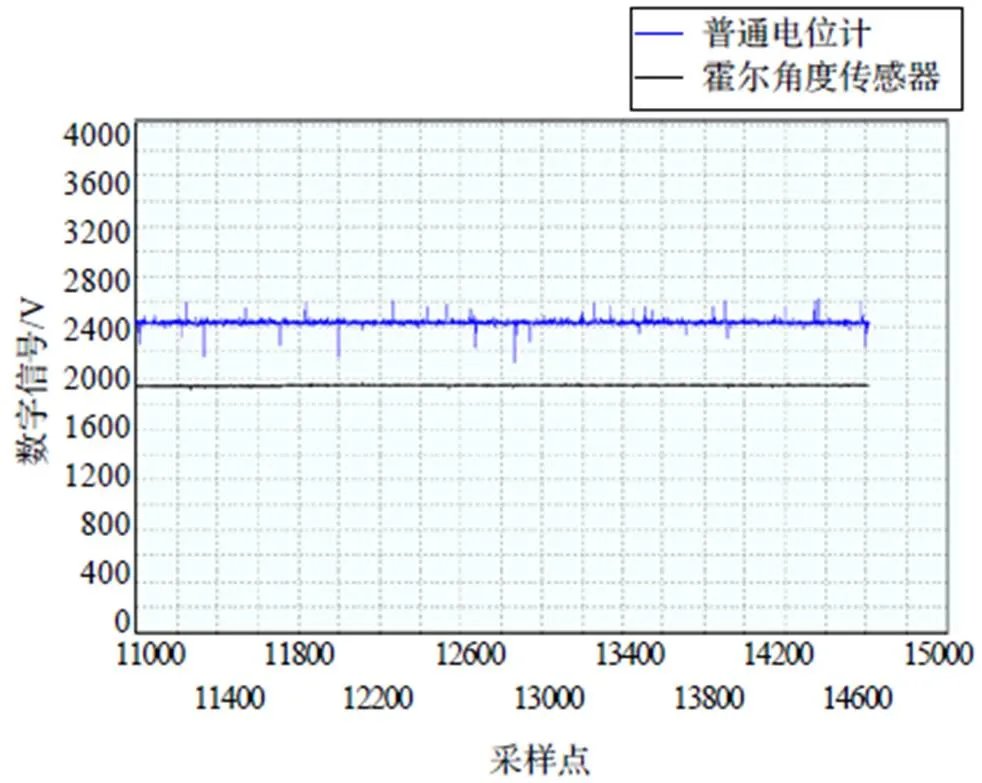
图11 普通电位计与霍尔传感器数据对比

图12 霍尔传感器测量采集
从图中知,本次标定的霍尔角度传感器比普通电位计数据波动小,同时数据呈线性变化,满足操纵杆摆动要求,在检测操纵杆摆动角度中可以替代普通电位计,具有体积小、适应性强的优点,可用于多种测量场合,同时减少机械磨损带来的输出特性影响,从而实现非接触式角度传感器的测量定位。
[1]王恒升,何清华. 基于智能传感器的控制手柄设计[J]. 传感技术学报,2004,17(4):541-546.
[2]邹梅,王培元,张华. 基于3D霍尔传感的摇杆手柄系统设计[J]. 科学技术创新,2019(35):40-42.
[3]汪浩宇,韩嘉骅. MLX90393的霍尔效应空间角位移传感器设计[J]. 单片机与嵌入式系统应用,2020,20(4):63-67.
[4]黄晓群. 多用途非接触式精密旋转传感器设计[D]. 广州:华南理工大学,2018.
[5]杨星,张家祺,王晶,等. 全角度无接触式智能角度传感器设计与验证[J]. 计算机工程与设计,2016,37(1):71-75,194.
[6]杜宇轩,魏榕山. 一种新型3D霍尔摇杆及机械臂系统设计[J]. 传感器与微系统,2020,39(3):102-105.
[7]孟志华,马世伟,朱伟. 基于3D Hall传感器的SBW挡位采集系统优化设计[J]. 电子测量技术,2011,34(1):82-85,118.
[8]赵建飞.基于霍尔效应的刹车踏板角度传感器设计与标定[D].江苏:苏州大学,2018.
[9]王永虹,徐炜,郝立平. STM32系列ARM Cortex-M3微控制器原理与实践[M]. 北京:北京航空航天大学出版社,2008.
[10]崔玉凤,蔡立娟,王彩霞,等. STM32与虚拟仪器串口通信的研究[J]. 信息通信,2015(12):207-208.
Design of Angular Displacement Measuring Device for Joystick
LIU Chuang,HAN Jiahua,ZHANG Ningning,ZHAO Zhiyuan
( School of Mechanical Engineering, Sichuan University, Chengdu 610065, China )
In order to deal with the defects of mechanical wear caused by the joystick contact angle sensor, which affects the output characteristics, in this article, by using the latest magnetic sensor programmer TDK MSP V1.0 developed by TDK-Micronas as the software development platform, a non-contact angle Hall sensor based on HAL 3725 Hall chip is designed. Through the selection of the sensor chip, the construction of the sensor model and the calibration experiment platform, the design of the hardware circuit and the software process control of the sensor calibration by the programmer, the digital signal of the sensor is finally collected through the experimental test. The experimental results show that compared with the contact sensor, the signal fluctuation is smaller, more sensitive, and the mechanical wear is reduced, which leads to the design of the non-contact angle sensor.
joystick;HAL 37xy;non-contact;sensor calibration
TN98
A
10.3969/j.issn.1006-0316.2021.01.010
1006-0316 (2021) 01-0067-08
2020-06-04
机电装置换挡操纵杆(操纵手柄)和车辆电子控制器、传感器技术开发项目(19H0533)
刘闯(1993-),男,辽宁鞍山人,硕士研究生,主要研究方向为机电控制、嵌入式软硬件开发,E-mail:305227861@qq.com;韩嘉骅(1974-),男,山西大同人,副教授,主要研究方向为机电一体化、嵌入式软硬件开发。
