综合控制系统的动态输出反馈控制器设计
2021-03-09孙凤琪程佳欣
孙凤琪, 程佳欣
(1. 吉林师范大学 数学学院, 吉林 四平 136000; 2. 河池学院 统计系, 广西 河池 546300)
0 引 言
控制系统中, 两种常用的控制策略分别为状态反馈控制和输出反馈控制[1]。在工业生产实际中, 系统的部分状态无法测量, 或测量费用非常高, 各种条件的约束使实现状态反馈控制变得很困难, 而输出反馈源于系统的输出, 很容易从外部获得, 技术上易于实现, 且具有明确的物理意义, 因而成为一种更容易实现的反馈形式。输出反馈分为静态输出反馈和动态输出反馈[2]。动态输出反馈融合了状态观测器和动态补偿器的设计思想。所以, 输出反馈控制器设计具有一定的理论研究价值, 同时又是控制工程领域的一个热点问题。随着数字信息化技术的飞速发展, 离散系统的输出反馈控制取得了许多的研究成果[3-5], 但在时滞, 摄动参数和不确定性条件下的离散系统控制器设计领域的研究还不是很完善。
Dinh等[6]最先提出的BMI(Bilinear Matrix Inequality)方法, 有效地解决了离散系统时滞条件下的输出反馈问题, 继而Chang等[7]对这一思想展开了深入研究, 取得了新的输出反馈研究成果。李艳辉等[8]通过李雅普诺夫稳定性理论和增广状态空间法, 对具有时滞和丢包现象的网络控制系统设计了离散鲁棒H∞控制器。陈健[9]对输出反馈控制控制器设计中存在的不足做了进一步补充, 并对几类系统都进行了稳定性及静态输出反馈控制器设计, 但并未对这几类系统进行动态的控制器设计。目前离散不确定时滞系统的研究成果[10-14], 大多是在控制器能准确实现的前提下得到的[15-19], 只考虑被控对象的不确定性, 并没有考虑控制器本身的摄动。在奇异摄动系统中加入摄动参数能有效提高系统模型准确度。目前,在离散系统输出反馈控制理论研究成果中, 对具有不确定性时滞以及摄动参数的控制系统的输出反馈控制器设计不多, 因此, 笔者对离散奇异摄动不确定综合系统进行输出反馈控制器设计, 构造新的李雅普诺夫泛函, 采用新的交叉性界定技术以及矩阵分析方法等, 对离散时滞奇异摄动不确定性综合控制系统进行输出反馈控制器研究, 给出具体的闭环系统渐进稳定的判据和控制器增益以及推论, 并且在所选取的样例中验证所得结论的可行性, 其结论可作为相关控制系统和工程领域研究的理论参考, 具有一定的理论价值和实际意义。
1 预备知识


考虑如下具有控制输入的离散奇异摄动不确定时变时滞控制系统

(1)
0≤d(k)≤τ
(2)
其中τ是已知常数,F(k)∈Ri×j是范数有界不确定系统模型参数矩阵, 且有如下条件
FT(k)F(k)≤I
(3)
欲设计动态输出反馈控制器

(4)
其中xc∈Rnc是控制器状态,nc是控制器阶数,r≤nc≤n,Ac,Bc,Cc,Dc是控制器的参数矩阵, 则闭环系统为

(5)
其中M1=A+DF(k)E1+BCDc。
问题为设计动态输出反馈控制器(4), 使离散奇异摄动不确定时变时滞闭环系统(5)渐近稳定。
2 离散奇异摄动不确定系统的动态输出反馈控制器设计
2.1 时滞依赖情形
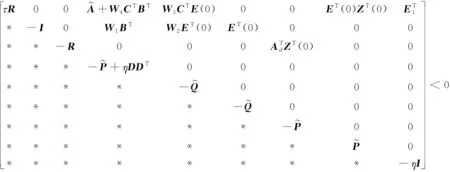
(6)
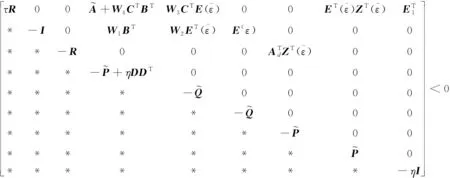
(7)
则系统(1)渐近稳定, 其动态输出反馈控制器为
证明 定义L-K泛函
V(x(k))=V1(x(k))+V2(x(k))+V3(x(k))
其中V1(x(k))=xT(k)ET(ε)ZT(ε)PZ(ε)E(ε)x(k)
其中P,Q,R是未知对称正定矩阵, 即PT=P>0,QT=Q>0,RT=R>0。
由引理1以及文献[20]的引理2.2可知,V(x(k))是正定的L-K泛函, 把V(x(k))沿着闭环系统(5)的任意轨迹进行差分, 得
其中

(8)


证毕。
2.2 时滞独立情形
则系统(1)渐近稳定, 其动态输出反馈控制器为
证明 定义L-K泛函如下
其中P,R,M是对称正定矩阵, 其余证明过程与定理1类似, 略。
3 算 例
由工程系统远距离传输问题建模成如下离散奇异摄动不确定系统, 下面给出系统在非标准情形下的算例。取


Z1=-20.138 7,Z2=3.394 0,Z3=12.034 8,
Z4=-5.930 4,Z5=1.349 2,η=1.602 1,
Ac=-10.394 0,Bc=-2.383 9,Cc=7.384 9,Dc=9.416 3
动态输出反馈控制器为

4 推 论
利用交叉项界定方法, 由引理2对泛函差分结果中的交叉性直接放大去简化系统, 然后对其进行动态输出反馈控制器设计, 便可得到如下推论。

证略。
5 结 论
1) 笔者针对离散奇异摄动不确定系统的动态输出反馈控制器设计问题, 给出了时滞依赖和时滞独立两种情形下的动态输出反馈控制器, 并且已完成对静态输出反馈控制器设计问题研究, 由于篇幅所限, 将在下一篇论文中给出。对所得结论进行处理得到新的推论, 推广和完善了现有文献的一些研究结果。最后通过数值算例验证了所提方法的可行性和有效性。
今后需要进一步解决的问题如下。
1) 文中对含有不确定性结构的离散奇异摄动系统设计输出反馈控制器, 虽然在一定的条件下得到了保守性较小的结论, 但在本文中所用到的方法和得出的结论也存在一定的局限性。对离散系统的控制器设计问题还有待进一步研究。
2) 笔者若使时滞离散系统变为多时滞离散系统, 对模糊离散奇异摄动系统, 基于线性矩阵不等式方法, 如何求输出反馈控制器及奇异摄动参数的稳定上界, 有待进一步研究。当系统更加复杂、 维数更高时[21], 笔者方法能否推广到相应的控制系统中, 还须进一步验证。
3) 在研究离散奇异摄动不确定系统时, 只考虑了系统矩阵A的不确定性, 可以再考虑不确定参数矩阵B,C, 使所得结论具有更广泛的适用性[22]。
4) 引进的结构Lyapunov矩阵不同,将直接影响所得结果的保守性, 采用何种泛函形式能更大程度减少这种保守性是一个值得深入研究的问题。
