牛舍清洁机器人研究进展与设计
2021-03-09翟改霞
贺 刚,王 馨,翟改霞,杨 莉
(1.中国农业机械化科学研究院呼和浩特分院有限公司,内蒙古 呼和浩特010010; 2.中国农业大学工学院,北京 100083; 3.内蒙古自治区巴彦淖尔市乌拉特中旗农牧机服务中心,内蒙古 巴彦淖尔015300)
0 引言
我国畜牧业正向着规模化、现代化和集约化的方向快速发展。随着奶牛规模化养殖进程的不断加快,规模化奶牛场的环境污染问题日益严重。继乳房炎、繁殖疾病之后,牛蹄病成为导致奶牛过早淘汰的第3大原因[1]。牛舍中积累的粪便是奶牛场主要的潜在污染源之一,奶牛在粪便中行走,增加了奶牛肢蹄病和乳房炎的发病率[2]。清洁、干燥和舒适的牛舍地面环境可有效预防乳房炎和其他疾病的发生[3]。
好奶源自好牛舍,清洁卫生的牛舍能保证奶牛的健康,从而提高奶牛的单产水平。因此,良好的粪便收集和处理技术在牧场规划及设计中的重要性日益突出。目前,规模化奶牛场大多采用集中饲养的方式,人工清粪方式已远不能满足产业化的需求。
规模化养殖业发达的国家,通常采用水冲、漏粪、刮板及机器人清粪等工艺,污粪处理效率高。我国养殖场多采用人工清粪或人工与机械清粪相结合的工艺,效率较低。随着养殖规模的扩大,为提高奶牛产奶量,保证奶牛健康养殖,本文设计了牛舍清洁机器人,用来代替人工完成牛舍粪便的清理工作,可实现自动化、全天候的工作,作业效率高,并且行走速度适中,没有噪声,对牛群的行走、饲喂和休息不造成任何影响和伤害。
1 奶牛场清粪工艺技术概述
1.1国外清粪工艺技术
国外养殖业发展较早,形成了规模化养殖,在污粪的收集、运输、储存和处理等方面一般采用自动化程度较高的清粪工艺。清粪工艺及设备主要有以下4种。
1.1.1水冲工艺技术
水冲式清粪工艺技术应用较早,20世纪70年代初在欧美等发达国家,特别是美国得到广泛推广。该工艺不仅可以清除粪污,同时具备为牛场降温的作用(图1)。采用该工艺获得污粪的含固率为3%~6%,适宜用泵、管路输送。该工艺所需人力少、劳动强度小,效率高,可以频繁冲洗,从而保证牛舍的清洁和奶牛的卫生。该工艺技术不复杂,但污水处理部分基建投资及动力消耗很高[4]。

图1 水冲工艺Fig.1 Water punching process
1.1.2漏粪工艺技术
漏粪工艺采用漏缝地板将污粪漏到下面的储粪池中,污粪可以储存在粪池中,也可以采用其他方式清除,如用自动刮板运走、用水冲走或依靠重力流走等[5]。奶牛活动时,尿、粪可从漏缝地板漏下去,从而保证牛蹄的干燥和牛舍的清洁(图2)。该工艺较水冲工艺可节省水资源,克服污水处理难的问题,但牛舍建造投资大,且储存的污粪易厌氧发酵,产生硫化氢、甲烷等,导致牛舍有害气体的集聚,以及牛舍过于潮湿等问题,牛舍的通风在这种工艺中显得尤为重要。

图2 漏粪工艺Fig.2 Fecal leakage process
1.1.3刮板工艺技术
刮板工艺技术即水泥地板与机械刮粪板组合的清粪方式(图3),该工艺在西欧、北欧、加拿大和美国等普遍采用。刮粪板可实现24 h清粪。刮粪板属于机械结构,操作简便,噪声小、工作安全可靠。刮板高度及运行速度的选取不影响牛的活动、休息与采食,该机构运行、维护成本低,对提高奶牛的舒适度,减轻牛蹄疾病和增加产奶量都有决定性影响[6]。

图3 刮板工艺Fig.3 Scraper process
1.1.4机器清粪工艺技术
机器人清粪(图4)工艺能实现牛舍的全自动清粪,运行轨迹可通过程序设计预先设置,通过GPS或北斗系统实现定位,具有机械刮粪板所有的优点。机器人清粪可将污粪通道及角落清理得非常干净,对动物生长活动影响小,大大减少了牛舍清洁所需的劳动力;具有易维修,易保养的特点;其充电装置可安装在牛舍的任何地方以实现自动充电[7]。

图4 机器人清粪工艺Fig.4 Robot cleaning process
1.2国内清粪工艺技术
近年来,我国新建的规模化牧场一栋牛舍的养殖规模可达200~600头牛。随着牛养殖规模越来越大,以及对奶牛福利养殖要求的日渐提高,智能化养殖成为目前及今后一段时间内养殖业发展的重要方向。寻找一种清洁、有效、经济和智能的清粪方式,以较少的投资来维持牛舍的清洁卫生,保证奶牛健康,提高产奶量,正为越来越多的养殖者所重视。国内奶牛场的清粪工艺近年来有所发展,主要分人工清粪、人工与机械清粪相结合两种。
1.2.1人工清粪工艺技术
人工清粪是在存栏2 000头以下的牧场中普遍采用的清粪方式。人工利用铁锨、铲板和笤帚等先将粪收集成堆,然后人力装车或运走。这种方式简单灵活,但工人工作强度大,环境差,工作效率低,人力成本也不断增加[8]。
1.2.2铲车清粪工艺技术
国内专业清粪设备,多是针对养鸡厂和养猪厂,如刮板式或链条式设备,而奶牛场专用清粪机械尚在研发和示范阶段。目前,多利用改装的清粪铲车(图5)完成奶牛场清粪。清粪铲车由小型装载机改装而成,推粪部分利用废旧轮胎制成一个刮粪斗,更换方便,小巧灵活[9]。采用这种机械清粪,不能充分发挥原装载车的功能,浪费工具,且只能在牛群去挤奶的时候清粪,工作次数有限,不能实时保证牛舍的清洁。此车体积大,工作噪声大,易对奶牛造成伤害和惊吓,不经济、也不灵活。

图5 铲车清粪工艺Fig.5 Forklift dung cleaning process
2 牛舍清洁机器人结构及参数设计
2.1结构及工作原理
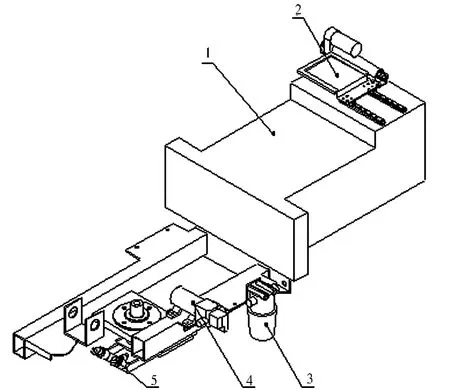
牛舍清洁机器人主要由驱动系统、充电触板、配重体、水箱、补水开关装置、控制系统、电瓶、防撞轮、超声波传感器、喷洒装置、刮粪板和控制系统等组成。其总体结构如图6所示。

1.超声波传感器 2.防撞轮 3.电瓶 4.控制系统 5.补水开关装置 6.水箱 7.配重体 8.充电触板 9.驱动轮总成10.刮粪板 11.喷洒装置图6 牛舍清洁机器人总体结构Fig.6 Structure of cowshed cleaning robot
牛舍清洁机器人动力由自带充电电瓶提供直流电力,包括电机、水泵、控制系统、传感器和开关等。前部刮粪板与地面接触,作为第3点支撑;驱动系统为左右2个独立驱动轮总成,可以完成直行、左右转向、后退等动作。防撞轮绕轴心旋转,当侧面墙体与防撞轮接触,轮的旋转可以减少摩擦力;当防撞轮正面碰到牛腿或硬物,由控制系统判断是否启动避障程序,起到保护作用。
当低水位液位传感器发出信号需要补水时,清洁机器人行驶到加水站,补水开关装置会打开阀门进行加水;当高水位液位传感器发出信号水箱已满,加水站阀门关闭后,补水开关装置会关闭阀门,清洁机器人驶离加水站继续清扫。
牛舍清洁机器人清洁宽度800 mm、行走速度9~18 m/min、最大清洁能力240头牛。
2.2主要参数计算
主要参数包括行走速度、电机功率、总减速比、电瓶容量及设备配置质量。
2.2.1行走速度
设定牛舍清洁作业面积900 m2,清洁刮板宽度0.8 m,清洁机器人清扫牛舍一次所用时间120 min,计算机器人行走速度为9.38 m/min[10]。为了满足实际需求,结合国内外考察结果,确定行走速度为v=9~18 m/min。
2.2.2电机功率
根据行走速度与牵引力计算电机功率。清洁机器人总质量约为340 kg,轮子与地面之间的摩擦系数与清洁阻力综合考虑为0.05,行走速度按v=18 m/min,计算电机功率。由于有刷电机存在噪声大、效率低、易产生故障等问题,因此本设计采用了一款直流无刷电动机作为机器人行走的驱动电机。考虑到能量损失,选择伺服电机2台,电机功率120 W,转速n=3 000 r/min,额定电流10 A,电压24 V。
2.2.3总减速比
根据牛舍清洁机器人行走速度及行走轮直径(D=250 mm)计算行走轮转速。
行走速度选择最大值,计算得行走轮转速n1=23 r/min,则总减速比i=3 000/23=130。参考相关产品参数,最终确定总减速比i=120,电机减速器i1=40,链轮减速i2=3。
2.2.4电瓶容量
按照2台电机额定功率计算,总功率为120 W。
清洁机器人清扫牛舍一次所用时间为120 min,则10 A×2 h=20 A·h。
考虑电瓶的耐用性和频繁充放电的特点,选择汽车用电瓶,为满足一次连续工作可达7.5 h,选取电瓶参数为电压12 V,容量75 A·h即可。
2.2.5设备配置质量计算
为保证设备的稳定性,基于3点支撑的原理,清洁机器人工作时,设计重心在驱动轮中心线靠前48 mm处,经计算刮粪板承载质量38.3 kg,如图7所示[11]。

图7 清洁机器人质量配置Fig.7 Weight configuration of cleaning robot
2.3关键部件设计
2.3.1喷洒装置
喷洒装置(图8)包括喷头、水箱、水泵、补水开关装置和过滤器等。
喷头喷量、喷头数量、水箱容积等参数是影响喷洒装置性能的重要参数。
本研究中,喷洒装置设计2个0.25 L/min的喷头,喷雾直径80 cm,水箱容积30 L[12]。
1.水箱 2.补水开关装置 3.过滤器 4.水泵 5.喷头图8 喷洒装置Fig.8 Spraying device
2.3.2自动充电装置
充电装置(图9)主要包括2个正负极触头、充电器、变压器和壳体等结构。
3 控制系统设计
3.1总体设计
根据设备作业条件及要求,控制系统需要具备供电、移动、数据采集和遥控编程等功能。采用嵌入式ARM作为自走式牛舍清洁机器人核心控制器,实现智能避障、按照规划的路径行驶,实现全天候智能清粪。采用超声波测距和陀螺仪定位方法精确检测推进的距离和方向,智能避障,避免牛与机器人发生危险;具有低电量报警自动充电和水箱液位检测及自动充水的功能。其总体架构如图10所示。

图9 充电站结构Fig.9 Structure of charging station
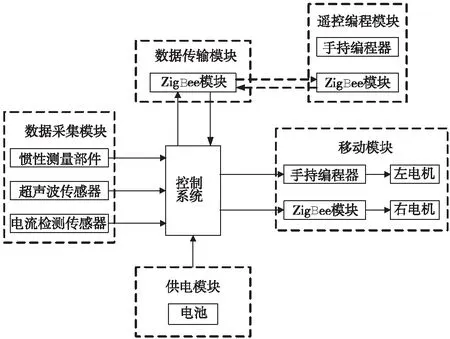
图10 牛舍清洁机器人控制系统总体架构Fig.10 Overall structure of control system for cowshed cleaning robot
从图10可看出,设备动力由供电模块提供。核心控制模块控制移动模块,完成设备的启停、行走方向控制和转速调节,设备行走速度和位置数据的采集。数据采集模块采集惯性测量部件、超声波传感器和电流检测传感器发出的数据信息,并将信息反馈到控制系统,控制系统根据得到的信息做出决策。惯性测量部件、超声波传感器用来获取机器人姿态、速度和加速度等数值;电流检测传感器用于障碍物检测、充电检测,以及判断机器人是否回到行驶轨迹的原点。
3.2控制系统功能模块
根据硬件系统总体设计,控制系统可实现任务管理、中断管理与智能决策。任务管理主要完成系统任务的划分和调度。中断管理主要对各中断定位、安防等信息进行收集,通过连续的中断处理程序,确保系统各动作的实时性。智能决策对收集到的传感器数据进行分析和处理,从而生成设备姿态控制、避障处理等策略,实现清洁机器人的智能控制。
3.3路径规划
采用基于机器人行为的方法,实现设备的局部最优路径规划。由于设备作业环境复杂,为其设计了follow_wall、change_direction和move_to_alone共3种行为。通过follow_wall、change_direction和move_to_alone的3种行为,实现设备由沿墙或牛栏行走、直行和转弯。3种基本行为中位于高层的行为抑制下层的行为,优先级如图11所示,S表示抑制,即change_direction行为抑制follow_wall行为,follow_wall行为抑制move_to_alone行为。在某一时刻只有一种行为对设备起作用。
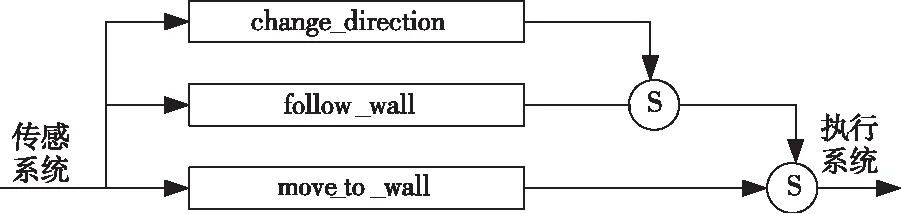
图11 基于行为控制的接口Fig.11 Interface based on behavior control
4 牛舍清洁机器人性能检测
4.1避障功能检测
按照预先规划好的路径行走,启动清洁机器人,当遇到障碍物时,可绕开障碍物继续清扫,直到完成清扫任务。
4.2主要技术参数试验验证
对表2所示主要参数进行了测定与计算,均达到设计要求。

表2 主要技术参数测定值
5 结论
牛舍清洁机器人是一款便于安装的独立机器,采用超声波测距传感器和惯性测量部件定位方法可精确检测机器人行进的路程和方向,并实现智能避障。可按照预先规划好的路径行走,实现最接近于奶牛自然状态的清粪作业,达到自动化、全天候的工作,并且行走速度适中,没有噪声,对牛群的行走、饲喂、休息不造成任何影响和伤害,给奶牛创造一个舒适、干净、干燥的环境,提高奶牛福利,并减轻清洁人员的劳动强度。
