潜水器输转系统轨道车设计与框架结构分析
2021-03-08南京中船绿洲机器有限公司南京211161
(南京中船绿洲机器有限公司,南京 211161)
郑加洲,朱晓俊,张晓群
0 引言
本文来源于国家重点科研项目11 000 m载人潜水器水面支持保障系统研制的子课题输转系统的研究。鉴于母船甲板空间有限,艉甲板停放2台运移轨道车,工作时要求轨道车能满足工作海况下进行载人潜水器的转运和系固要求。为达到上述目标,项目要求对输转系统中轨道车自锁、抗摇防倾和外形尺寸等关键技术进行研究。
输转系统工作海况恶劣,承受负载大,且布置空间狭小,因此,本文的研究重点是解决轨道车框架承载问题、可靠安全的自锁和抗摇防倾设计。轨道车主体主要由各种槽钢、钢板等焊接而成,框架复杂,在工作状况下的强度校核难以通过理论计算进行,因此有必要建立轨道车的结构模型,通过力学分析计算,掌握轨道车的运动状态,利用有限元分析软件进行结构分析,掌握其应力分布情况,对轨道车结构进行优化处理,设计可靠的自锁装置和抗摇防倾装置。
1 轨道车设计
1.1 轨道车主要技术要求
轨道车应满足工作海况下进行载人潜水器的转运和系固要求。该系统具有轨道车在轨道任一位置自锁、抗摇防倾等功能,保证潜水器在存放区域和收放区域进行安全转运。
轨道车的技术目标即满足工作5级风。在3.6 m的有义波高海况下安全工作负荷为25 t,运行速度为0~5 m/min。
2.2 轨道车主体结构设计
轨道车的外形尺寸为6 200 mm×3 600 mm×1 300 mm,轴距2 800 mm,总重量6 000 kg。车体为框架结构,单个梁高度260 mm。所有驱动机构均安装在车体内部和下部,车体上表面除导向机构、顶杆装置和系固吊耳外,其余为平整面板,主要材料为船用钢板,屈服强度为355 MPa。
2.3 防倾覆和缓冲防撞机构
在轨道车两侧安装防倾钩,采用垫片调整防倾钩与轨道之间的距离,防止由于船舶垂荡运动造成轨道车跳动,每侧各4件。
缓冲防撞装置主要轨道两端的物理限位,控制轨道车行驶的范围,在接触式限位失灵的情况下,防止轨道车驶出轨道。橡胶缓冲器具有最大的缓冲力,安装在车体前后两端,各2件,起到缓冲的作用。
2.4 轨道车系固
根据中国船级社《潜水系统和潜水器入级规范(2018)》附录B进行船舶航行中系固力计算[1]。系固计算数据作为轨道及轨道车结构强度校核,系固点轨道安装螺栓和齿条安装螺栓的数据输入。轨道车和轨道系固过程中,轨道车对称布置4个系固点,每个系固点拉1根钢丝绳系固。轨道车系固连接方式为:轨道车吊耳—卸扣—钢丝绳压制索具—螺旋扣—卸扣—甲板吊耳。
轨道车结构设计如图1所示。
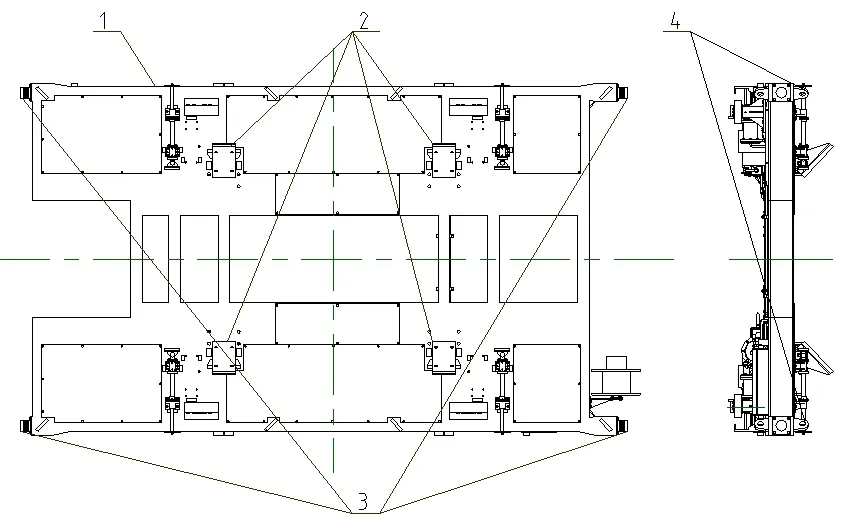
图1 轨道车结构示意图
3 工况分析
根据使用海况,输转系统轨道车在正常工况下工作时,潜水器整个重量靠4个地脚作用于轨道车,当在风载、波浪和母船倾斜的作用下,可能出现前2个地脚承载、后2个地脚承载和侧面2个地脚承载的情况。工况如下:
1)工况1。正常工况,4个地脚作用于轨道车承载。
2)工况2。风载和波浪作用下母船倾斜,前2个地脚作用于轨道车承载。
3)工况3。风载和波浪作用下母船倾斜,后2个地脚作用于轨道车承载。
4)工况4。风载和波浪作用下母船倾斜,侧面2个地脚作用于轨道车承载。
4 轨道车框架结构分析
4.1 创建模型及简化
在保证不影响计算精度的前提下使计算更简化省时,有必要在创建模型之前考虑到模型的简化,如忽略不重要的开孔、填平焊缝、简化螺纹孔和去除不影响分析的零件特征等。本文采用专业三维设计软件CREO创建轨道车的框架模型,并在创建模型的过程中直接对模型进行简化,完成后导入有限元分析软件中生成有限元模型。
经过简化的有限元模型如图2所示。

图2 轨道车框架有限元简化模型图
4.2 网格划分
由于模型采用三维实体建模,选用的单元类型为四面体单元,该单元是10节点实体单元,适合生成不规则网格模型。整体采取默认自动网格划分。轨道车框架网格划分如图3所示。

图3 轨道车框架网格划分图
4.3 边界条件施加及载荷加载
在轨道车底部4个滚轮轴的位置设定约束:轴线方向旋转自由度放开,其他自由度约束。
重力载荷可以在软件中通过直接加载实现;潜水器对轨道车的作用力主要通过加在轨道车地脚上远程力实现。
工况1~工况4的约束及载荷加载分别如图4~图7所示。
4.4 计算结果及分析
经过分析计算,工况1~工况4轨道车框架等效应力云图分别如图8~图11所示。
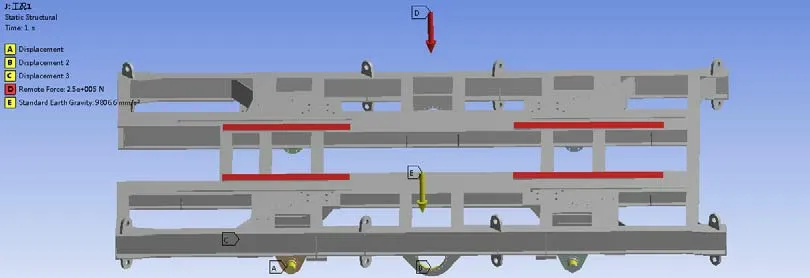
图4 工况1轨道车框架约束和加载图

图5 工况2 轨道车框架约束和加载图
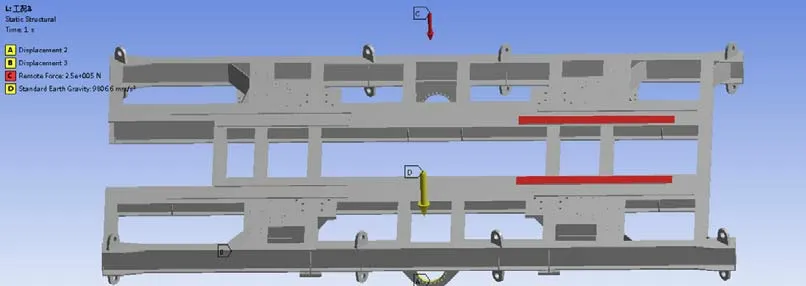
图6 工况3轨道车框架约束和加载图

图7 工况4 轨道车框架约束和加载图
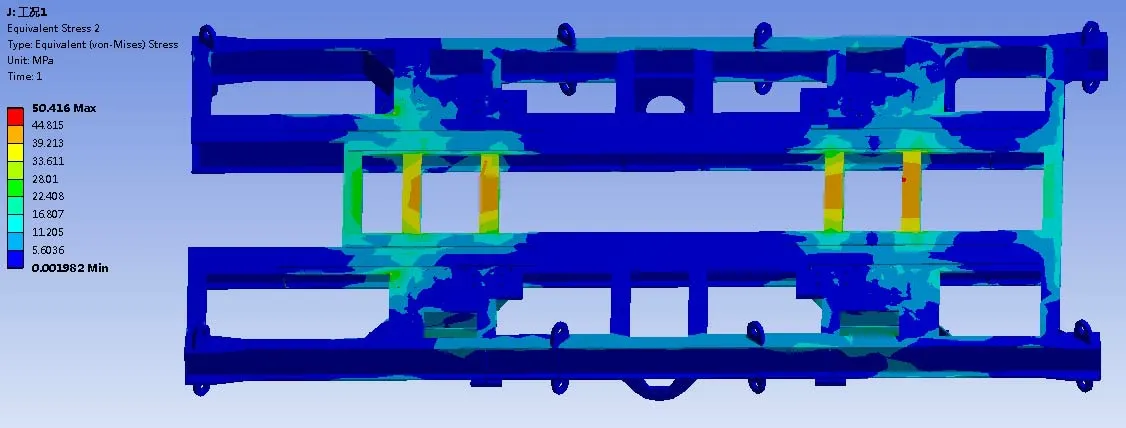
图8 工况1轨道车框架等效应力云图

图9 工况2 轨道车框架等效应力云图
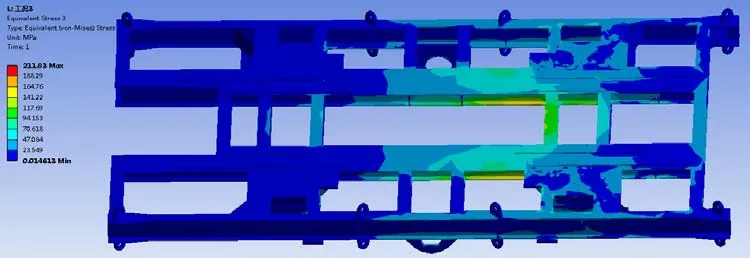
图10 工况3轨道车框架等效应力云图

图11 工况4 轨道车框架等效应力云图
由图8~图11可知,在正常工况下,即工况1轨道车框架的整体等效应力水平较低,最大在中间横梁位置,数值为50.416 MPa,远远小于屈服强度355 MPa,满足安全设计要求,参考起重机设计规范[2]。
当受到风载和波浪的影响时,出现潜水器只承载于前2个地脚或后2个地脚,即工况2或工况3的情况下,由于承载位置减少,轨道车框架等效应力水平急剧升高,最大应力主要在前部中间横梁位置底部或后部中间横梁位置底部,这2种工况较工况3有最大值,为211.83 MPa,由于该状态为偶尔发生且不是持续的,安全系数约为1.7,因此是安全的[3]。
工况4中的潜水器有可能作用于某一侧的2个地脚,由图11可知:等效应力最大区域为中间横梁位置,偏于承载一侧,最大值介于工况1和工况2、工况3之间,最大值为139.47 MPa,同样满足安全设计要求。
因此,对于轨道车框架而言,满足强度要求。
5 结论
本文介绍了在恶劣海况下以及有限的母船空间下,设计潜水器输转系统轨道车通过对标国外设备,使用三维软件进行设计,并采用有限元软件进行强度校核和结构优化,获得合理的轨道车框架结构,保证了设计的安全可靠。在后续的试验中满足起重机设计规范和船舶与海上设施起重设备规范的要求,得到了中国船级社(CCS)的认可,并通过了实船验证和海试试验,取得了各方面的一致好评。
潜水器输转系统轨道车的成功研制使部分配套设备领域实现了突破,提升国产船舶配套设备的技术水平和市场竞争力,从而带动国内船舶配套设备产业的发展,最终提高国产设备的市场占有率和装船率。
