车载激光扫描技术在公路测量中的研究及应用
2021-03-06王维波周安发李世伟罗胜金
王维波,周安发,李世伟,王 平,罗胜金
(1.湖北辉宏地理信息有限公司,湖北 武汉 430074;2.湖北省测绘成果档案馆,湖北 武汉 430074)
目前国内关于车载激光扫描在公路中的应用,研究多集中于解决车载激光扫描外业测量[1-3]或内业激光点云数据算法处理[4],项目案例实践上多集中于高速公路测绘或地形地貌较好地区的道路测绘[5],针对高山、高海拔地区的研究应用案例较少。本文针对这一情况,借助西藏那曲地区某县两条公路地形地貌相似的特点,设计利用集成的车载激光扫描系统和传统野外测绘两种方法,实现县道两侧各200 m 范围内道路地形数据的自动获取和中桩、断面测量,并根据项目施工测量过程,研究车载激光扫描技术流程和验证车载激光扫描技术在道路测量应用中的技术优势和缺陷。
1 车载激光扫描系统组成和工作原理
车载激光扫描系统是一个多传感器集成系统,主要由三维激光扫描仪、数码相机、卫星定位系统(GPS)、惯性导航系统(IMU)、载车等部分组成[6]。其工作原理是在载车的顶部架上稳固连接的三维激光扫描系统的传感器部分,通过GPS 进行所载车辆的定位,取得原点大地坐标的精确数据,再通过IMU 进行车载激光扫描测量系统姿态测量,获取大地坐标系的三维激光扫描仪偏航角、滚动角及高低角,进而通过激光扫描的方式对待测点逐点的进行扫描测量,获得待测点相对测绘基准而言的方位角、高低角及距离,通过解算得到待测点的大地坐标数据,地物目标的属性等信息通过数码相机同步采集的图像进行辨识[7]。车载激光扫描仪采集地形数据原理如图1 所示。
2 实验方案
2.1 实验的仪器和性能
选用澳大利亚MaptekI-site8820 三维激光扫描仪,作为本次车载激光扫描试验勘测仪器,该仪器具有内置同步7 000 万像素相机,2 km 的扫描距离,高速激光扫描器,能快速的获取被测物体的三维信息,通过自带的14 倍望远镜镜头进行后视和手持控制器进行操作扫描,可以大大提高外业工作效率和降低劳动强度。

图1 车载激光扫描仪地形图数据采集原理
MaptekI-site 8820 激光扫描仪的扫描勘测距离长,精准度高,防水、耐高压、耐低温性能,符合本项目勘测的要求。其主要技术性能指标如表1 所示。

表1 MaptekI-site8820 激光扫描仪技术性能指标
2.2 场地的选址和流程设计
为了对车载激光扫描测量系统在高海拔复杂地形情况下的精度指标和作业效率进行检测和分析,研究以西藏那曲地区某县两条长度和地形地貌均相似的县级道路X1(全长约150 km)、X2(全长约144.4 km)改扩建测量为例,在设计上X1 采用传统测量作业方式,X2 采用新型车载激光扫描技术进行作业,以利于研究车载激光扫描技术应用于道路测量的作业流程和关键技术,并对比分析车载激光扫描技术相较传统作业方式的优势和不足。设计总体工作流程如图2 所示。

图2 公路测量总体工作流程
2.3 实验过程
2017 年8 月进场,确定勘测试验场地,并布设首级GPS 控制网和四等水准网,在测区范围内共布设了15 个首级控制点,230 个点作为一级加密GPS 控制点,在点位选择上主要考虑点位分布合理,密度均匀,而且便于直接使用。X2 线GPS 控制网中联测了X1 线独立坐标系下的D 级GPS 点3 个(G505,G506,G507)。沿线路平均15 km 布设一对首级控制点,同步观测时间180 min,以便将GPS 定位结果转换至地面坐标系时作为起算数据,控制测量从X1 线G505,G506,G507 为起点,沿DK,CK,BK,AK,LK 段的线路顺序,到尼玛乡首级控制G500 结束。
X1 线路采用全野外数字测绘成图方法,利用GPS-RTK 进行图根控制测量和碎部点采集,经外业采集、补测、检测,采用南方CASS9.1 软件,进行内业编辑成图。
为保证扫描数据的精度,将X2 线路项目工程分为AK 段50.422 km,BK 段33.58 km,CK 段6.553 km,DK 段23.618 km,LK 段12.541 km,进行分段扫描测量。由于每个工点只扫描了1 次,且各工点之间互相独立,因此不存在点云块之间的匹配连接问题。从点云到测绘成果的实现包括点云拼接、数据滤波、数据精简、地理测量、DEM 建模、纵横断面图生成,整个数据处理采用随机软件包I-Site studio 软件平台进行处理。获取的激光点云和1∶1 000 地形图成果如图3 和图4所示。
2.4 关键技术难点及解决办法
2.4.1 测区交通条件较差
测区位于平均海拔4 700 m 的高原地区,最高处海拔超过5 000 m,现场空气稀薄,地势落差较大,气候多变,一天中温差巨大,加上测区交通条件较差,道路崎岖颠簸,容易造成外业作业人员冻伤和缺氧。为了减少外业作业工作量和提高工作效率,保证施工进度,考虑采用无人机测绘技术和新型车载激光扫描技术,同样因气温地下,气候多变,航线落差较大,无法保证无人机的稳定性型,难以进行高效的作业,经实地实验和技术路线研究分析,采用稳定性更强的车载激光扫描技术,选用仪器工作温度在-40 ℃~50 ℃,存储温度在-40 ℃~70 ℃,具备IP65级防尘、防水。
2.4.2 基准站布设
作业区未收集到国家级、省级控制点和水准点,无法利用已有的测量控制点作为起算点,采用多台GPS静态同步观测的方法,埋设首级控制点,并在X1、X2线路建立相对独立坐标系,坐标系采用与GPS 同步的WGS84 坐标系,3°带,中央子午线为92°30′00″,投影面为4 700 m 测区平均高程面,以保证数据成果精度。
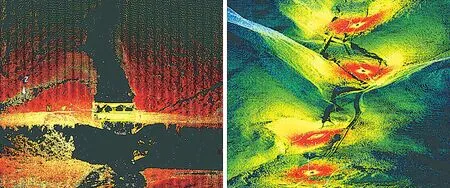
图3 获取的激光点云数据

图4 X2 公路改扩建AK-LK 段地形图(左)和局部放大图(右)
2.4.3 激光扫描靶标布设
激光扫描仪坐标系与惯导坐标系的原点与坐标轴指向不完全一致,因此 GPS/IMU 组合定位定姿系统提供的位置与姿态不能直接用于车载激光点云的解算,在车载激光扫描系统正式投入使用前,需要对激光扫描仪坐标系与惯导坐标系之间的相对位置关系进行标定,通常通过三维控制点进行车载激光扫描系统的标定[8]。为了对车载激光扫描系统进行高精度的标定,在道路的两侧等间隔布设一对靶标点。
2.4.4 扫描盲区处理
激光测量的一大难点是测量的死角问题,将激光扫描仪安装在移动车辆上,受车辆高度和扫描仪安装位置的限制,激光扫描仪部分视场被遮挡,从而会产生一定的扫描盲区。同时道路的沿线交通工程设施,如护栏、广告牌、桥梁等构筑物的遮挡,也会产生一些激光扫描盲区,盲区会造成点云空洞。本研究为了保障扫描数据的完整性,作业时在车顶部抬高底座,提高激光扫描仪的安装高度,设计上安装2 个激光扫描探头,采用沿道路双向来回扫描,同时利用GPS-RTK补充采集漏洞区域,完成道路两侧地形图的完整测绘,在DEM 构建时,采用高程内插的方式,内插出盲区的DEM,以提高作业效率。
2.4.5 车载激光扫描数据的处理
车载激光测量系统具有测量速度快、精度高等优点,但也存在非连续覆盖和数据量巨大等缺点,阻碍了数据解算处理、传输和进一步应用。扫描的激光点云数据具有冗余性主要表现在:一是含有较多的重复数据,同一位置含有多次扫描的数据;二是含有较多的多余数据,如建筑物只需提取墙体边缘的点云数据,不需要墙面中间的部分;三是点云数据因受到环境等因素的影响而出现噪声点,产生不属于扫描目标本身的冗余数据。因此对扫描后的数据处理需进行必要的平滑与去噪及精简处理,本文借助I-Site studio 软件设计的点云解算、处理算法,对外业采集的数据进行自动处理。
2.4.6 成果精度评价
在测量中成果精度评价主要采用中误差的方式。本文公路施工设计对测量数据精度提出了较高的要求,如何保证测量数据的精度,以及如何对成果进行精度平差,设置那些评价指标,对本文成果的控制和研究结论至关重要。本文成果精度平差的指标设定为控制测量平面位置中误差、高程中误差检查,地形图图根点中误差和数据采集完整性检查,中桩、横断面精度检查。车载激光扫描技术和GPS-RTK 测绘技术成果比较,设置人员投入、仪器投入、成本投入、作业繁琐程度、成图精度等指标,比较验证新技术在效率、精度以及资金投入方面的情况。
2.5 实验结果
1)利用新型车载激光扫描技术,获取道路的中桩、断面测量及带状地形图测绘成果,经过实测控制测量点坐标与点云坐标比较检查,一共测量了200 个控制点,平均中误差0.039 m,高程平均误差0.31 m。在1∶1 000 地形图精度检查中,地物点相对于邻近图根点的点位中误差为±4.7 cm,邻近地物点间距中误差为±6.7 cm,高程注记点相对于邻近图根点的高程中误差为±5.8 cm。结果表明本次测量数据误差均在规范要求范围内,将激光扫描测绘技术应用于1∶1 000带状道路测绘采集的数据与传统GPS-RTK、全站仪一样是精确可靠的。
2)借助Maptek I-site8820 长距离三维激光扫描技术,在空间基准建立、靶标布设最优方案设计、长距离激光扫描地物精度控制、点云数据自动处理、精度平差控制等技术上进行研究设计,快速获取了X2 km两侧各200 m 范围内地形、地貌激光点云数据,并通过配备的Maptek I-Site Studio 内业处理软件,实现了激光测绘超远距离地形数据的快速获取。
3)依据实验设计的评价指标,车载激光扫描在人员投入、人员设备安全、成本投入、作业效率等方法面具有较大的优势,但是目前存在仪器成本较高、后期数据处理工作量较大、电脑配置要求较高、存在扫描盲区、扫描精度受基站范围约束等缺点,总体上表明,将车载激光扫描技术应用于公路测量在成本控制和效率上优势将日趋明显。
3 结 语
1)针对西藏那曲某县高海拔缺氧,气温低气候多变、现场交通条件差特点,制定了两种测量技术方案,既降低了人工作业的难度,又提高了作业效率和精度,较好地满足了道路规划设计、施工测量的需要。
2)研究了车载激光扫描技术应用于道路改扩建测量的方法和关键技术难点的解决方案,既实现了激光点云数据的快速获取,又提高了点云精度的控制。
3)设计两条相似作业环境的县级道路为对比,比较分析采用常规GPS-RTK、全站仪测量方法和车载激光扫描方法,在人工、仪器投入、作业效率、成果精度等方面的成本和效率,实验研究成果针对性强,实用价值高,验证结果可以作为国内类似项目的参考依据。
4)推动了车载激光扫描技术在国内道路测量中的应用,实现了车载激光扫描技术在高海拔、气候多变地区的道路测量,发挥了以点带面的示范作用,对高海拔地区、特殊地形地貌地区的道路测量以及全国其他城市的道路测量工作具有一定的借鉴意义。