车载LiDAR在智能化全息测绘中的应用
2021-03-06王文峰
王文峰
(1.上海市测绘院,上海 200063)
智能化全息测绘是以地理信息服务精细化、精确化、真实化、智能化为目标,利用倾斜摄影、激光扫描等传感技术获取全息地理实体要素,通过深度学习等AI 技术自动半自动化提取建立地理实体的矢量、三维模型数据,并结合调绘充实各地理实体的社会经济属性,形成涵盖地上地下、室内室外的一体化的全息高清、高精的结构化实体三维地理数据,为智慧社会提供全空间的地理信息服务[1-3]。
传统的外野测图劳动强度大、成本高、周期长、易受外界环境的影响,采集的要素种类不全、且都是二维坐标,满足不了数字城市建设对三维地理信息的需求[4-5]。车载LiDAR 是全息采集手段中的重要一环,能够高效、全面地获取道路及其附属设施和部分建筑立面的空间和纹理信息。结合点云和影像数据我们可以做到对道路红线范围内三维数据的能采尽采、应采尽采,极大的丰富了数据采集的内容。相比于传统的作业手段,获取的数据更全面、更精细、更实时、更真实[6-8]。
1 车载激光扫描系统
车载激光扫描系统主要由激光扫描仪、全景相机、惯性导航单元IMU、GPS 定位系统和里程计DMI 等组成,系统集成度高、测量精度高且可多平台安放。车载移动测量系统在工作时,GPS 为各类传感器提供统一的时间系统,测量车在行驶过程中的实时位置也通过GPS 来获取。全景相机在作业过程中,主要负责记录道路两侧的街景影像数据,同时激光扫描仪与大地坐标系X、Y、Z 三个方向的夹角(横滚角、俯仰角、航向角)由IMU 实时地获取,根据获得的位置与姿态信息,经过一系列的平移和旋转可以获得目标点在大地坐标系下的三维坐标值。当每个传感器的数据采集任务完成之后,将各类数据进行相应的处理后融合得到彩色三维点云数据。
本次采用的华测AS-900HL 多平台激光雷达测量系统,该系统主要有以下优势:①多平台,卡扣式快速拆装模式,可在机载、车载模式下快速切换;②高精度,车载模式满足5 cm,机载模式满足5 ~20 cm不同精度等级要求;③高效率,车载模式城市道路30~50 km/h,机载0.6~1 km2/架次;④智能化,通过手持端无线远程控制,8 km 范围内实时参数设置、设备监控及控制激光、相机、惯导等数据记录和停止,轻量灵活。整机重量仅4.7 kg,挂载于一体化设计的大黄蜂无人机续航40 min,同时可外接高清相机,生成彩色点云和正摄影像。其主要性能指标见表1。

表1 AS-900HL 多平台激光雷达系统主要性能指标
2 车载数据采集与处理
2.1 测区概况
本次示范区是上海市浦东新区张江科学城,张江被誉为中国硅谷,是上海市浦东新区重点开发区域之一。测区内交通网络发达,道路红线范围内地理要素种类齐全,具有较强的代表性。
2.2 前期准备
数据采集前宜收集施测及邻近区域的正射影像、大地测量资料,了解测区概况和数据采集日期的天气情况。规划停车区域、GNSS 基站布设位置以及行车路线,了解施测及邻近区域的道路通行情况,对不熟悉的测区进行实地踏勘。纠正点布设,纠正点宜沿道路进行布设,交叉路口应布设。宜选取具有一定厚度和大小的道路标线(如停车线、标识、分隔线外角等特征点),检查点布设,检查点宜布设在相邻纠正点中间的区域。
2.3 数据采集
在数据采集之前,要进行设备的调试与GNSS 基站的架设。惯性测量装置的初始化应采用静态观测等方式进行,初始化时GNSS 卫星数量不宜小于10 颗,位置精度衰减因子(PDOP)宜小于4。
采集过程中要避开上下班高峰期,不宜与大车并行,行驶速度应满足点云密度要求,一般城市道路行驶速度不宜超过40 km/h,隧道、高架等区域行驶速度不宜超过60 km/h。双向四车道及以上,或有中央隔离带的道路,应双向扫描。地下隧道、高架以及辅道、匝道,应专门扫描。双向两车道及以下且没有中央隔离带的道路,可只采集一次。在不违反交通规则的情况下,单向双车道应靠右车道行驶。单向三车道应沿中间车道行驶,单向四车道应沿右侧第二车道行驶。十字路口宜采用“井”字形采集,纵横方向宜是通路,尽量避免车辆调头。实景影像采集时应尽量避免逆光,宜按距离触发方式采集影像,距离不宜超过15 m。
2.4 数据处理
数据采集完成之后,选择距离施测区域最近的GNSS 基站数据与IMU 数据通过IE 进行组合导航计算得到POST 文件。利用POST 文件提供的时间、位置、姿态信息以及相关参数文件,通过配套的后处理软件CoPre 完成点云数据、全景影像数据的解算。点云解算时对其进行距离滤波,本项目选择的滤波距离为50 m,减小了后期点云处理的数据量与复杂程度。在GNSS卫星信号较差或失锁的区域,结合纠正点和点云纠正软件CoRefine 提升定位测姿数据的精度,以获取高精度的点云数据,本项目中点云的平面和高程精度都控制在5 cm 之内。点云数据解算完成之后,使用检查点数据与点云点数据进行对比分析并统计精度情况,由此判断生产的点云数据是否满足项目所要求的精度,通过验证后方可进入下一步处理环节。
高精度的点云获取完成之后,本项目结合全自动、半自动化的方法对红线范围内的所有地物进行全要素的三维提取。杆类、箱类地物则提取其落地中心位置,牌类地物根据其具体类别提取其左下角或中心位置,线状地物提取其实际的三维位置。主要要素包括道路边界、道路标线、交通信号灯、交通标志牌、路灯、探头、行道树、邮箱、垃圾箱、电力箱、电信箱、控制箱、消火栓、公交站牌等,其中路灯、探头、交通指示箭头等有朝向的地物需采集其角度信息。相比于传统的地形图,道路红线范围内新增地物要素70 多种。根据上海市特大城市的管理需求,结合车载点云数据、全景影像数据以及外业综合调绘等手段,还对采集的地理要素根据其在经济社会中承担的角色增加了各自的社会经济属性,为精细化的城市管理提供了有力的数据支撑。图1 为红线范围内全要素地形图的局部制作成果。
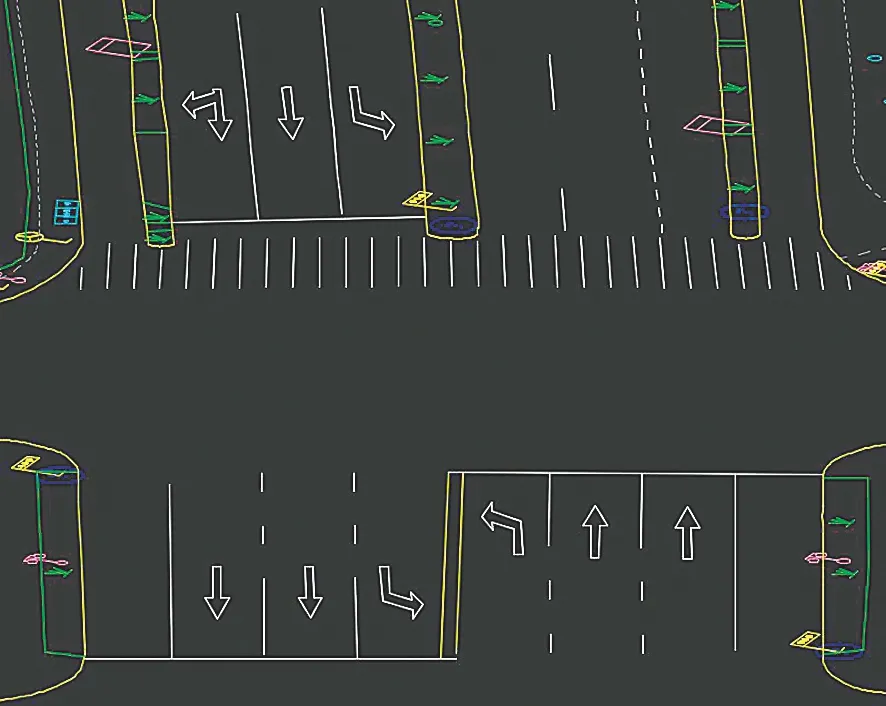
图1 全要素地形图成果
3 成果精度与分析
为验证全要素地形图成果的进度,在阶段性成果中挑选了2 km2的数据进行了验证。平面精度验证使用RTK 布控,全站仪实测的方法。高程精度验证采用水准仪实测和三角高程实测的方法,共采集了平面点1 716 个,高程点294 个。平面、高程精度统计表如下,其中平面精度主要按地物类别统计,高程精度按地物精度等级统计,一级主要包括城市道路,二级主要包括交通及附属设施,三级主要包括管线设施。由表2、3 可见,各类地物平面精度都在10 cm 之内,高程精度都在6 cm 之内,满足本项目设计要求。

表2 平面精度统计表/cm

表3 高程精度统计表/cm
4 结 语
相比于传统的地形图,全要素地形图实现了从二维到三维的提升,采集的要素种类、属性信息也有了很大幅度的增加。利用车载激光扫描系统实现了对道路红线范围内要素的能采尽采、应采尽采,提升了作业效率,丰富了数据采集的内容,满足社会对三维地理信息日益增长的需求。随着智慧城市的不断推进,全要素地形图成果的应用需求也会越来越广泛,如自动驾驶高精度地图、城市精细化管理等方面都会产生巨大的价值。