基于Adams获取挖掘机斗杆的载荷时间历程
2021-03-05耿泽楠程江源谢宝智
耿泽楠 程江源 谢宝智


摘 要:工作装置是挖掘机的主要执行机构,其中斗杆所受载荷复杂,易产生变形、断裂与疲劳失效。针对某中型反铲液压挖掘机,使用SolidWorks对其工作装置进行实体建模并装配,导入Adams后施加合理的约束、驱动和挖掘阻力,对铲斗挖掘时3个典型危险工况进行了动力学仿真模拟分析,得到斗杆各铰点载荷时间历程曲线和数据文件,为后继的有限元强度分析与疲劳寿命预测提供了基础数据。
关键词:挖掘机 斗杆 动力学仿真 载荷时间历程
中图分类号:TU621 文献标识码:A 文章编号:1674-098X(2021)09(c)-0120-04
Acquisition of Load Time History of Excavator Bucket Rod Based
on Adams
GENG Zenan CHENG Jiangyuan XIE Baozhi
(Institute of Modern Equipment Manufacturing, Changzhou Institute of Industry Technology, Changzhou,Jiangsu Province, 213164, China)
Abstract: Working device is the principal executive mechanism of hydraulic excavator. Among them, bucket rod is prone to deformation, fracture and fatigue failure due to its complex external load. For a medium-sized backhoe hydraulic excavator, SolidWorks is used to model and assemble its working device. After importing Adams, reasonable constraints, driving and digging resistance are applied, and the dynamics of three typical dangerousworking conditions during bucket excavation are carried out. Through the simulation and analysis, the load time history curve and data file of each hinge point of the stick are obtained, which provides the basic data for the subsequent finite element strength analysis and fatigue life prediction.
Key Words: Excavator; Bucket rod; Dynamics simulation; The load time history
挖掘机的工作环境恶劣,其工作装置的受力复杂多变,为确保正常施工,需要对重要构件进行强度、模态、可靠性和疲劳寿命的分析计算与实验。载荷谱是进行以上研究的基础与前提,一般需要实际工况的测试,将实测得到的载荷时间历程进行处理、分析、统计,以图表、数据和曲线的形式表现出来。但随着科技的进步,计算机技术的高速发展,应用仿真计算可以获得模拟真实工况下的载荷时间历程,为利用有限元进行疲劳寿命分析和疲劳实验快速地提供了数据支持,节省了成本与时间[1] 。
本研究以挖掘机的斗杆为分析对象,首先应用SolidWorks软件建立挖掘机工作装置的三维模型;其次导入到多体动力学软件Adams进行动力学仿真,获得了斗杆在铲斗挖掘的3种典型工况下,5个铰点位置的载荷时间历程;最后保存为有限元分析软件可使用的载荷文件,从而可进一步在有限元分析软件中进行应力、应变以及疲劳寿命的评估分析和研究。
1 SolidWorks实体模型的建立
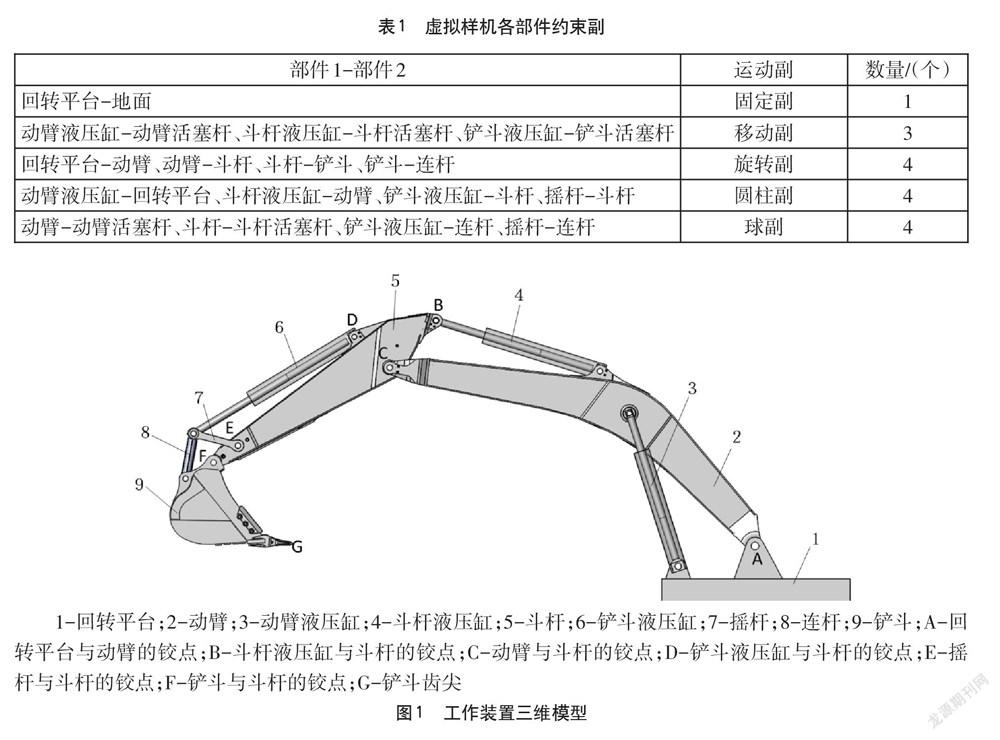
Adams提供了简单的建模工具,但是与专业的三维建模软件相比功能不强、操作也不方便。因此,选择SolidWorks分别对回转平台、动臂、动臂液压缸、斗杆液压缸、斗杆、铲斗液压缸、摇杆、连杆、铲斗建模,并装配得到挖掘机的工作装置,如图1所示。然后导出成Adams可以導入的X_T格式文件。在装配时,为减少
Adams的约束数量,节省计算资源,将没有相对运动的构件组合成子装配体;并使回转平台的底面与系统坐标系平面平行,避免在Adams中旋转整个模型,保证重力的方向与工作装置实际相符。
2 Adams虚拟样机的建立
导入SolidWorks导出的工作装置装配体文件(X_T格式),选择保留子装配体选项。导入后进行前处理,
主要工作有:合并部件、修改部件名称与颜色、设置材料与质量属性,并检查重力的方向。
导入Adams后,原SolidWorks中设置的各构件之
间的装配关系全部消失,需要重新设置。Adams中是通过约束定义各构件之间的连接方式和相对运动方式,常用的是理想约束与虚约束。
在选择运动副对挖掘机工作装置进行约束时,常会出现冗余约束。虽然Adams系统会自动去除这些冗余约束,保证工作装置模型有正确的自由度数,但为避免自动去除的约束中含有分析需要的约束,和因冗余约束过多导致仿真的意外中断,应该透彻理解工作装置中各部件之间的相互运动关系,以及Adams中各种运动副约束的自由度,通过选择适当的约束形式主动消除冗余约束[2]。本虚拟样机定义的约束副如表1所示。
最后,得到虚拟样机的模型验证信息,如图2所示。其中,没有冗余约束,剩余的3个自由度将分别由3个液压缸的移动副驱动来约束。此时,工作装置的原动件数目等于自由度数且大于零,满足机构具有确定运动的充分必要条件。
3工作装置动力学仿真
3.1典型工况的选取
挖掘机在挖掘作业时显然比行走状态时承受的载荷大且复杂,因此选择挖掘工况进行研究与分析。本文建立的挖掘机模型,铲斗容积小于0.5m3,属于中小型挖掘机,一般以铲斗挖掘为主,因此,参照《液压挖掘机结构强度试验方法》(GB9141-88),选取了铲斗挖掘时的3种典型危险工况,对斗杆进行受力分析。工况1:斗杆液压缸全缩,铲斗齿尖G、斗杆与铲斗的铰点F和动臂与车体的铰点A在一条直线上,此时挖掘半径最大。工况2:动臂液压缸全缩,斗杆与铲斗的铰点F、动臂与斗杆的铰点C和铲斗齿尖G在一条直线上,且与斗杆液压缸的轴线垂直,此时斗杆液压缸的力臂最大。工况3:动臂液压缸全缩,斗杆与铲斗的铰点F、动臂与斗杆的铰点C和铲斗齿尖G在一条直线上,且垂直于地面,处于最大挖掘深度。本文以第一种工况,挖掘机在最大挖掘半径工作时为例,进行详细阐述。
3.2 驱动设置
通过Adams中运动副运动(Joint Motion)定义3个移动副运动,采用Step函数按照一定的运动规律,驱动动臂液压缸、斗杆液压缸和铲斗液压缸依次或共同协调运动,实现各典型工况的运动模拟。工况1的动臂液压缸、斗杆液压缸和铲斗液压缸的驱动函数如表2所示。
如图3所示,以上驱动函数实现了0~4s,3个液压缸协同动作,挖掘装置从初始位置先运动到工作位置,然后4~12s,铲斗缸独立运动完成挖掘工作。
3.3 挖掘载荷的确定与设置
铲斗在挖掘时受到的挖掘阻力分为3个部分:物料自身的重力、法向挖掘阻力和切向挖掘阻力。其中,物料自身重力的方向为垂直向下,保持不变;法向挖掘阻力的方向始终指向铲斗与斗杆的旋转中心,切向挖掘阻力的方向与法向挖掘阻力垂直,且与铲斗运动方向相反[3-7] 。在铲斗挖掘过程中,随铲斗位置变化挖掘阻力的大小均随之改变,在Adams中可通过 Step函数来施加变化的挖掘阻力。如表3所示,0~4s内没有挖掘阻力;4~8s随挖掘深度的增大,法向和切向挖掘阻力逐渐增大;8~12s因铲斗挖掘深度减小,又逐渐减小到零。物料重力在挖掘的前半段时间0~8.2s内没有作用在铲斗上,挖掘到最深处后立即达到最大值,并保持到结束。
3.4 仿真
在虚拟样机中正确设置好表2、表3的驱动与挖掘阻力Step函数后,分别在斗杆的5个铰点B、C、D、E和F约束处添加力的测量,选择幅值;运行仿真后,在后处理模块PostProcessor中即可得到如图4所示的斗杆5个铰点在工况1时的受力随时间变化的曲线,即载荷时间历程曲线。
类似的方法,可得到斗杆5个铰点在工况1时X方向、Y方向和Z方向的载荷时间历程;以及工况2和工况3各铰点的约束反力幅值和X、Y、Z这3个方向的载荷时间历程。
3.5 输出CAE载荷文件
在Adams/View界面选择File菜单下的Export項,对话框中选择FEALoads文件格式、有限元分析软件名称,并进行正确的相关参数设置,确定后便可以导出生成工况1下斗杆各铰点的Abaqus载荷文件[8] ,供后继的有限元分析导入使用。
4 结语
第一,利用SolidWorks建立了某中型挖掘机工作装置的三维模型,同时进行了正确装配与坐标系调整,导出了Adams可以导入的X_T格式文件。
第二,编写了铲斗挖掘时3种工况的驱动函数和载荷函数,运用Adams完成了刚体动力学分析,能更加准确的反映挖掘机在工作时真实运动和受力情况。
第三,通过仿真,得到了挖掘机斗杆各铰点在铲斗挖掘时,3种典型危险工况下的载荷文件,对机械结构和零件的后继分析与改进,提高工作装置的强度与寿命,有着决定性的作用。
参考文献
[1] 章翔.液压挖掘机工作装置刚柔耦合仿真与疲劳寿命研究[D].武汉:武汉科技大学,2017.
[2] 王健,王虎奇.8t液压挖掘机工作装置的运动仿真[J].广西科技大学学报,2019,30(1):90-95.
[3] 李泉儒.基于ADAMS的液压挖掘机工作装置仿真分析[D].西安:长安大学,2018.
[4] 张衡.基于ADAMS的机械臂仿真分析[J].科技资讯,2018,16(21):76,78.
[5] 唐晶磊,吕勋国.基于ADAMS的液压挖掘装置动力学仿真分析[J].内燃机与配件,2022(3):38-40.
[6] 於来玲,殷晨波,陈长林,等.液压挖掘机动力学仿真与试验分析[J]. 机械制造与自动化,2021,50(6):118-122.
[7] 潘高.基于ADAMS的液压挖掘机铲斗机构优化[J].科技与创新,2021(22):65-67,70.
[8] 董正荣.液压挖掘机工作装置三维数模开发及联合仿真优化[D].长春:吉林大学,2019.
