ITER 装置中等离子体旋转和反馈控制对电阻壁模影响的数值研究*
2021-03-04曹琦琦刘悦王硕
曹琦琦 刘悦† 王硕
1) (大连理工大学物理学院, 三束材料改性教育部重点实验室, 大连 116024)
2) (核工业西南物理研究院, 成都 610041)
在托卡马克等离子体中, 电阻壁模是非常重要的磁流体不稳定性, 特征时间在毫秒量级.对长时间稳态运行下的先进托卡马克, 电阻壁模限制着聚变装置的运行参数空间(放电时间和比压), 影响经济效益, 所以研究电阻壁模稳定性至关重要.本文使用MARS 程序, 针对ITER 装置上9 MA 先进运行平衡位形, 研究了等离子体旋转和反馈控制对电阻壁模的影响.结果表明, 在没有反馈控制时, 当比压参数 C β 取0.7, 等离子体环向旋转频率达到1.1%的阿尔芬频率时, 可以完全稳定电阻壁模; 在等离子体环向旋转和反馈控制共同作用时, 比压参数 C β 取0.7, 反馈增益 | G| 取0.6 时, 稳定电阻壁模所需要的等离子体旋转频率为0.2%的阿尔芬频率.可见, 单独靠等离子体环向旋转稳定电阻壁模所需的旋转频率较大; 而等离子体环向旋转和反馈控制共同作用可以降低稳定电阻壁模的旋转频率临界值, 符合先进托卡马克的运行.本文的研究结果对中国聚变工程试验堆CFETR 的工程设计和运行具有一定指导意义.
1 引 言
托卡马克实验中可以通过提高装置的比压来实现聚变功率和自举电流份额的提升.而随着装置比压的增加, 由压强或压强梯度驱动的磁流体不稳定性可能会出现, 外扭曲模是其中最重要的磁流体不稳定性之一.外扭曲模对托卡马克装置放电产生重大影响, 严重时甚至直接导致放电破裂或终止.早期的研究表明, 当托卡马克等离子体外部有足够靠近的理想导体壁时, 外扭曲模可以完全被稳定住.所谓理想导体壁是指电阻为零的导体壁.在实际实验中, 真空室或第一壁材料等都有一定的电阻, 有电阻的导体壁称为电阻壁.这类电阻壁使外扭曲模演化为一种增长率缓慢的不稳定模式, 由于这种不稳定性与电阻壁有关, 被称为电阻壁模(resistive wall mode, RWM)[1−3].电阻壁模的特征时间是磁场在电阻壁渗透的特征时间, 为毫秒量级[4].电阻壁模一旦产生, 仍然会造成等离子体的扭曲, 严重时也会导致放电破裂.因此, 对于需要长时间稳态运行的先进托卡马克, 电阻壁模的研究是非常重要的.
2004 年Liu 等[5]对ITER 装置的反馈控制和等离子体环向旋转稳定电阻壁模进行了研究, 结果表明, 安装在真空室内的线圈和极向传感器组成的反馈控制系统能够有效地抑制电阻壁模, 并指出流体效应下等离子体旋转对电阻壁模稳定的有效性.Xia 等[6]针对JET-like 的平衡位形研究了等离子体旋转效应和反馈控制的协同作用, 结果表明等离子体旋转与反馈控制的协同作用下能促使电阻壁模产生两个稳定窗, 并且在反馈控制下, 等离子体电阻对电阻壁模有很大影响.Xia 等[7]还研究了在反馈控制下动理学效应对电阻壁模的影响.Liu 等[8]研究了ITER 装置中等离子体剪切流对电阻壁模的影响.Hao 等[9−11]研究了捕获热粒子对电阻壁模的影响, 捕获能量粒子稳定电阻壁模, 以及由黏滞引起的湍流和等离子体旋转对电阻壁模不稳定性的协同作用.
由于ITER 装置的诸多物理参数与已有的其他聚变装置不同, 如ITER 装置几何尺寸更大, 需在高比压、大自举电流、长脉冲下运行.ITER 装置目标平衡对应的归一化比压 βN= 2.92, 对应的比压参数 Cβ= 0.44, 本文模拟中使用的平衡是在ITER 设计平衡的基础上略调高了比压值, Cβ= 0.7,βN= 3.18.ITER 装置希望运行在更高的比压参数下, 以获得更高的聚变功率、自举电流份额等.而电阻壁模会随着 βN的升高, 变得更加不稳定, 模式的增长率相对更高, 有利于提高模拟结果的精度(因为目标平衡在使用磁通-电压控制模式且反馈增益为 | G| = 0 时, 模式的增长率已经进入准稳定状态, 可见文献[12]的图3).对于ITER 这样的超大型托卡马克装置, 放电破裂的破坏性更大, 对装置中面向等离子体的材料将会造成毁灭性的伤害.因此, 在装置运行中必须有效控制电阻壁模不稳定性的增长.
对电阻壁模的控制一般可以分为被动控制和主动控制两种手段.被动控制是利用模式与波发生共振阻尼[13,14], 把不稳定模式的自由能耗散掉.主动控制是通过在真空室内或外部安装的反馈线圈补偿泄露的磁场[15], 从而控制电阻壁模.近期研究发现使用主动控制和被动控制的协同作用能更好地控制电阻壁模[6].
本文利用MARS-F 程序[16]对ITER 装置电阻壁模不稳定性进行了模拟, 分别研究了流体模型下等离子体旋转、反馈控制及协同作用对电阻壁模不稳定性增长率的影响.文章安排如下: 第二部分将简要介绍使用的MARS-F 程序的模型, 第三部分将给出使用的ITER 平衡, 第四部分将对数值计算结果进行分析和讨论, 最后进行总结.
2 计算模型
使用线性模型研究电阻壁模不稳定性及其控制是目前所有模拟中公认的方法, 使用线性模型是因为电阻壁模的增长率尺度较小, 它的非线性项贡献可以忽略不计.MARS[17]程序是一个线性代码,在环几何位形下自洽求解电阻磁流体方程组, 程序不仅考虑了环向等离子体旋转, 而且把电阻导体壁、外加反馈线圈以及各种阻尼效应也引入到模型中.MARS 程序联立等离子体区域的非理想磁流体线性化方程组、真空区域方程、薄壁近似以及外加反馈线圈方程求解得到不稳定模式的本征值.下面简单地介绍一下本文使用的MARS 程序模型.
等离子体的方程为[17,18]:

这里 γ 是复数, 代表电阻壁模的増长率和实频, 由多普勒位移 i nΩ 修正, n 是环向模数, Ω 是沿着环向 ϕ 的等离子体旋转频率.B, J 和P 分别为由平衡程序CHEASE[16]求解得到的平衡磁场、平衡电流密度和平衡压强.v, b, j 和p 分别表示扰动速度、扰动磁场、扰动电流密度和扰动压强.ρ 是扰动质量密度, R 是等离子体大半径, Zˆ 是在垂直方向的单位矢量, Π 是黏性应力张量, 表示平行声波黏滞阻尼[19],代表阻尼强度, k 表示声波数 ( n −m/q)(1/R) ,表示离子热速度.η 是等离子体电阻率, Γ 是比热比系数.
在真空区域中, 没有扰动速度和扰动压强, 且扰动磁场满足:

导体电阻壁满足薄壁近似:

其中 ηW和 hW分别表示导体壁的电阻率和厚度, br,bx分别代表是扰动磁场逆变量的分量, 在托卡马克曲线坐标 ( r,χ,ϕ) 中, 有

其中r 是径向坐标, 定义为极向磁通的平方根, χ是极向坐标, 依赖于雅可比行列式的选择.
反馈线圈方程为[12]

其中 ψf, If, Rf和 τf分别表示穿过反馈线圈的扰动磁通、线圈电流、电阻以及反馈线圈的响应时间,G 表示反馈系统增益, 反馈增益是工程参数, 在控制过程中通过调整反馈控制系统的PID 参数来实现对系统的有效控制.本文中的G 相当于PID 系统的比例项系数.这里G 是归一化的参数, 归一化因子为无量纲量 Kp和 Kd表示反馈控制器中的比例和微分因子, bs为传感器线圈内测量/响应的噪声, 这里也是用磁场表示的.
3 平衡与比压
采用ITER 装置等离子体电流 IP= 9 MA 的先进运行平衡位形, 其能量增益Q = 5, 输出功率P = 340 MW, 真空环向磁轴处磁场 B0= 5.3 T,等离子体大半径 R0= 6.2 m, 小半径 a = 2.0 m.ITER 装置的极向截面如图1 所示, 真空室分为内外两层, 在内层真空室弱场侧偏上、中间、偏下分别安装了三组磁扰动线圈, 用于控制边缘局域模和电阻壁模不稳定性, 以及内侧中心平面处的一组传感器, 用来测量极向磁扰动.
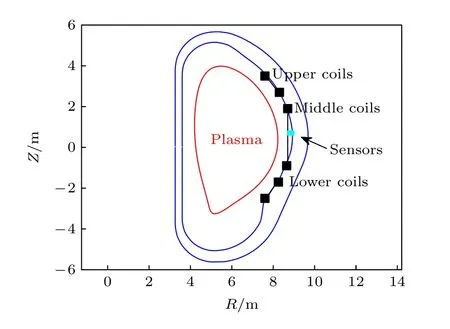
图1 ITER 装置极向截面及反馈控制示意图Fig.1.Geometry of poloidal cross section and feedback control in ITER.
图2 给出了ITER 装置9 MA 先进运行平衡的各平衡量剖面分布, 图2(a)是安全因子, 在芯部有较弱的负磁剪切, 磁轴处的安全因子为 q0=2.44, 边界处的安全因子达到 qa= 7.13, 安全因子最小值为 qmin= 1.60, 这种弱剪切的结构能产生较高的比压, 是托卡马克先进运行方案的一个重要特点.图2(b)是等离子体压强分布, 压强使用磁压归一化, 图2(c)是等离子体质量密度剖面, 图2(d)是等离子体环向电流密度剖面, 使用B0/(µ0R0)进行了归一化处理.

图2 ITER 装置9 MA 先进运行平衡 (a)安全因子剖面; (b)等离子体压强剖面, 由 B 02/µ0 归一化; (c)质量密度剖面, 磁轴处归一化为1; (d)环向电流密度剖面, 由 B 0/(µ0R0) 归一化, s = , ψ 是归一化的极向通量Fig.2.Radial profiles of (a)safety factor; (b)equilibrium pressure normalized by factor B 02/µ0 ; (c)plasma density normalized to unity at the magnetic axis; (d)toroidal current density normalized by factor B 0/(µ0R0) and s = ψ is the normalized poloidal flux for ITER target plasma designed for 9 MA steady state scenario.
针对图2 给出的平衡位形, 固定电阻壁的位置在 d /a=1.29 和环向模数 n =1 , 运用MARS 程序计算得到了有理想壁和无壁的时候外扭曲模的增长率和比压的关系, 如图3 所示.所得到的计算结果表明, 在无壁时, 比压极限为; 在有理想壁存在时, 比压极限为=3.48 (其中βN=β(%)a(m)B0(T)/Ip(MA) 是 归 一 化 比 压, β 是等离子体热压与磁压的比值, a 是等离子体小半径,B0是环向等离子体磁轴处的磁场, Ip是等离子体总电流).这里定义一个等离子体比压参量表示无壁时比压极限, Cβ=1 表示有理想壁时比压极限, 我们在研究电阻壁模的时候, Cβ会在0 和1 之间取值.

图3 在无壁和有理想壁时, 不同比压下的外扭曲模增长率Fig.3.Growth rate of external kink versus β N with and without an ideal wall.
4 数值结果与讨论
4.1 流体效应对电阻壁模的稳定作用
对于上面给出的ITER 平衡, 取等离子体比压参量为 Cβ=0.7 , 研究等离子体旋转频率对电阻壁模的影响.对于平行黏滞 κ//分别取0.5, 1 和1.5,用MARS 程序计算得到了不同等离子体旋转频率下电阻壁模的增长率, 如图4 所示, 其中等离子体旋转频率使用阿尔芬频率 ΩA=υA/R0归一化的.所得到的计算结果表明, 在平行黏滞 κ//不变时, 电阻壁模增长率会随着等离子体环向旋转频率增大而减小, 当旋转频率达到临界频率时, 电阻壁模的增长率为零.这是因为模式(波)与离子声波在有理面附近发生共振阻尼, 耗散掉驱动不稳定模式的自由能, 从而达到稳定.所得到的计算结果还表明,平行黏滞越大, 稳定电阻壁模所需的旋转频率越小, 稳定效果越好.这是因为黏滞越大, 对压强驱动的不稳定模式的自由能耗散越大, 模式的增长率越小.

图4 等离子体比压参量为 C β =0.7 、平行黏滞 κ // 分别取0.5, 1 和1.5 时, 不同等离子体旋转频率下的电阻壁模增长率Fig.4.Growth rate of resistive wall mode versus plasma flow with equilibrium pressure scaling factor C β =0.7 ,parallel viscous coefficient κ // = 0.5, 1, 1.5.
当等离子体比压参量 Cβ在0.1—0.9 之间变化,等离子体旋转频率在0— 1.2×10−2范围内变化,用MARS 程序计算得到了电阻壁模的增长率, 计算中设置平行黏滞 κ//=1.5.计算结果如图5 所示.在 Cβ比较小且等离子体具有较高旋转频率的情况下, 可以得到电阻壁模的稳定区间.随着 Cβ的增加, 电阻壁模表现得越不稳定, 为了扩大稳定电阻壁模的稳定窗口, 在等离子体流体模型下, 仅利用等离子体旋转实现ITER 装置电阻壁模的控制是比较困难的, 需要反馈控制的加入.
4.2 反馈控制对电阻壁模的稳定作用
用等离子体旋转结合平行黏滞来稳定电阻壁模需要很大的临界等离子体旋转阈值, 像ITER 等这种大型托卡马克难以达到, 需要主动控制(反馈控制)参与.如图1 所示, ITER 装置的反馈系统是由三组反馈线圈和一组传感器组成的, Li 等[20]分析了电压-电流、电压-电压、磁通-电流以及磁通-电压四种反馈方式, 本工作采用的反馈控制是磁通-电流反馈控制.

图5 平行黏滞 κ // 取1.5 时, 不同等离子体比压参数和不同等离子体旋转频率下的电阻壁模增长率Fig.5.With parallel viscous coefficient κ // =1.5 , growth rate of resistive wall mode versus plasma flow for different equilibrium pressure scaling factor C β.
首先给出主动反馈线圈产生的磁场分布, 如图6 所示, 以 Cβ= 0.7 为例, 可以看出不加等离子体旋转, 只考虑主动反馈线圈时, 在等离子体边界有比较大的磁场分布, 芯部基本没有线圈产生的磁场.

图6 没有等离子体旋转频率, C β =0.7 时, 计算得到的主动线圈产生的磁场分布Fig.6.Without plasma flow and equilibrium pressure scaling factor C β =0.7 , the calculated magnetic field distribution of active coil.
然后, 在研究三组线圈增益前, 为达到上下两组线圈相位的最佳组合, 利用MARS-F 程序对上下两组线圈的相位进行了扫描.首先固定上下两组线圈增益为 | G| = 0.5, 固定一组线圈相位, 去扫描另一组线圈相位, 以找到最佳的相位组合, 如图7所示, 电阻壁模的增长率随上下两组线圈的相位组合不同而不同, 在上下两组线圈的相位为 ϕu=150°, ϕL= –150°时, 反馈控制电阻壁模的效果最好, 把这一相位组合称为最佳相位组合, 和Wang等[12]采用磁通-电压的反馈控制方式相位扫描的结果一致, 以下所有上下线圈的研究中, 上下线圈的相位均取 ϕu= 150°, ϕL= –150.

图7 线圈增益幅值为 | G| = 0.5 时, 上下两组线圈不同相位下电阻壁模的增长率Fig.7.Growth rate of resistive wall mode with varying phase of feedback gains for upper and lower sets of active coils, feedback gain amplitude | G| = 0.5.
接着, 在没有等离子体旋转频率, 平行黏滞κ∥=1.5时, 分别研究了中间反馈线圈、上下两组反馈线圈及三组反馈线圈的增益对电阻壁模的影响, 如图8—图10 所示.对比发现, 等离子体比压越大, 所需要稳定电阻壁模的临界增益越大; 在不同等离子体比压下, 当反馈增益逐渐增大时, 增长率慢慢变小, 当增益幅值足够大时, 能使得电阻壁模的增长率为零, 稳定电阻壁模, 这是因为通过导体壁泄露的磁场已由中间反馈线圈得到补偿, 此时导体壁等效为理想壁.定义完全稳定电阻壁模的增益为临界反馈增益 Gcri, 当G > Gcri时, 电阻壁模是稳定的, 当G < Gcri时, 电阻壁模仍然会增长,最终影响高比压等离子体放电.例如在 Cβ= 0.6时, 中间一组线圈稳定电阻壁模所需的临界增益为|G|= 1.2, 上下两组线圈稳定电阻壁模所需的临界增益为 | G| = 1.6, 上中下三组线圈稳定电阻壁模所需的临界增益为 | G| = 0.7, 可见, 在只有反馈控制中, 上中下三组反馈线圈的控制效果更好.
4.3 电阻壁模的协同控制

图8 在没有等离子体旋转频率、平行黏滞 κ // =1.5 时,不同的等离子体比压参量, 不同中间线圈的增益下电阻壁模的增长率变化Fig.8.Without plasma flow and with parallel viscous coefficient κ // =1.5 , growth rate of resistive wall mode with varying equilibrium pressure scaling factor versus feedback gains for middle sets of active coils.

图9 在没有等离子体旋转频率、平行黏滞 κ // =1.5 时,不同的等离子体比压参量, 不同上下两组线圈的增益下电阻壁模的增长率变化Fig.9.Without plasma flow and with parallel viscous coefficient κ // =1.5 , growth rate of resistive wall mode with varying equilibrium pressure scaling factor versus feedback gains for upper and lower sets of active coils.
前面两节分别研究了被动控制和主动控制单独对电阻壁模的稳定作用, 当旋转频率超过一定阈值或反馈增益足够大时, 电阻壁模能被完全稳定住.然而在实际装置运行中, 两种控制手段同时存在, 例如装置放电时给等离子体辅助加热的中性束注入会产生等离子体旋转, 控制其他不稳定性模式的反馈线圈对电阻壁模也有稳定作用等等.所以接下来研究ITER 装置中等离子体旋转与反馈对电阻壁模的协同作用.

图10 在没有等离子体旋转频率、平行黏滞 κ // =1.5 时,不同的等离子体比压参量, 不同上中下三组线圈的增益下电阻壁模的增长率变化Fig.10.Without plasma flow and with parallel viscous coefficient κ // =1.5 , growth rate of resistive wall mode with varying equilibrium pressure scaling factor versus feedback gains for all three sets of active coils.
固定等离子体旋转频率 Ω0/ΩA= 0.002,Ω0是等离子体中心处的旋转频率, 平行黏滞 κ//=1.5 ,黏滞提供了离子声波阻尼稳定机制, 考虑磁通-电流反馈控制, 发现反馈控制和旋转共同作用比单独反馈控制能够更好地稳定电阻壁模.例如 Cβ=0.6 时, 只有反馈控制存在(三组反馈线圈同时加入), 没有等离子体旋转频率时, 完全稳定电阻壁模所需要的反馈增益为 | G| = 0.7, 如图10 所示; 当再加入等离子体旋转频率 Ω0/ΩA= 0.002 时, 完全稳定电阻壁模所需要的反馈增益为 | G| = 0.6, 如图13 所示.可见, 反馈加入旋转可以降低稳定电阻壁模的临界增益, 可以更好地控制电阻壁模.

图11 在等离子体旋转频率 Ω 0/ΩA = 0.002、平行黏滞κ// =1.5时, 不同的等离子体比压参量, 加上旋转后中间线圈的增益和增长率的变化Fig.11.With plasma flow Ω 0/ΩA = 0.002 and parallel viscous coefficient κ // =1.5 , growth rate of resistive wall mode with varying equilibrium pressure scaling factor versus feedback gains for middle sets of active coils.

图12 在等离子体旋转频率 Ω 0/ΩA = 0.002、平行黏滞κ// =1.5时, 不同的等离子体比压参量, 加上旋转后上下两组线圈的增益和增长率的变化Fig.12.With plasma flow Ω 0/ΩA = 0.002 and parallel viscous coefficient κ // =1.5 , growth rate of resistive wall mode with varying equilibrium pressure scaling factor versus feedback gains for upper and lower sets of active coils.
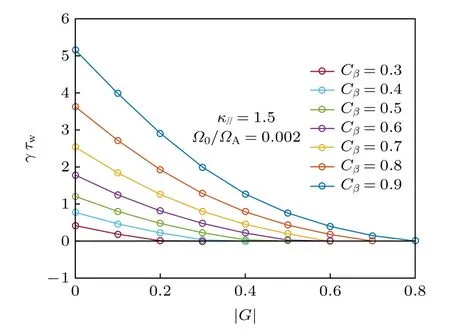
图13 在等离子体旋转频率 Ω 0/ΩA = 0.002、平行黏滞κ// =1.5时, 不同的等离子体比压参量, 加上旋转后上中下三组线圈的增益和增长率的变化Fig.13.With plasma flow Ω 0/ΩA = 0.002 and parallel viscous coefficient κ // =1.5 , growth rate of resistive wall mode with varying equilibrium pressure scaling factor versus feedback gains for all three sets of active coils.
接着分别研究在各个平衡压强下, 中间线圈、上下两组线圈和上中下三组线圈与等离子体旋转的协同作用, 如图11—图13 所示.例如 Cβ= 0.6时, 在中间反馈线圈与等离子体旋转的共同作用下, 稳定电阻壁模需要的临界增益为 | G| = 1.0; 在上下两组线圈与等离子体旋转的共同作用下, 稳定电阻壁模需要的临界增益为 | G| = 1.4; 在上中下三组线圈与等离子体旋转的共同作用下, 稳定电阻壁模需要的临界增益为 | G| = 0.6.可见, 在三组线圈与等离子体旋转的作用下稳定效果最好.
5 结 论
本文研究了在ITER 装置上电阻壁模的主动控制和被动控制, 给出了ITER 装置先进运行平衡位形; 用MARS 程序在流体模型下研究了等离子体旋转对电阻壁模稳定的物理机理; 使用磁通-电流反馈控制系统, 控制系统包括三组反馈控制线圈和一组极向传感器, 用MARS 程序扫描了上下两组线圈稳定电阻壁模的最佳组合相位; 研究了单独反馈控制时, 稳定电阻壁模的临界增益及稳定电阻壁模的物理机理; 研究了在等离子体旋转和反馈控制共同作用下对电阻壁模的控制, 研究表明反馈控制的加入, 不仅可以降低稳定电阻壁模的旋转频率, 而且能够更快地达到稳定.
本文的研究结果对中国聚变工程试验堆CFETR 的工程设计和运行具有一定指导意义.
感谢房玉在MARS 程序运行过程中给予的帮助和支持, 感谢刘超博士对本工作的有益讨论.
