锂电池寿命与整车节能双目标优化的FCEV能量管理策略
2021-03-01杜鹏英
杜鹏英,李 静,陈 慧
(浙大城市学院信电学院,杭州 310015)
0 引言
燃料电池混合动力汽车具有零排放和高效的优点[1-4],特别适合于城市客车和旅游车[5],目前燃料电池汽车一般都采用混合驱动模式,即在燃料电池基础上,增加蓄电池或超级电容作为辅助动力[6],以满足汽车的驱动动力。
在混合动力汽车整车控制中,能量管理策略是整车控制的核心[7-8]。氢燃料电池和锂电池混合动力车(Fuel Cell Lithium Battery Hybrid Electrical Vehicle,FCEV)的能量管理策略主要有两类,即使用规则(或模糊规则)的能量分配以及建立模型的优化算法。在第1 类算法中,例如文献[8]中以电动机需求功率和蓄电池荷电转态(State of Charge,SoC)值为输入量,决定蓄电池的稳态输出功率,剩余功率由燃料电池承担,本质上是规则的查表模式。文献[9]中提出一套功率分配规则,并将规则描述为一张流程图。文献[10-13]中使用模糊逻辑算法,以等效能耗最小为目标,根据需求功率和SoC值,建立模糊规则算法分配能量。
第2 类算法中,一般以等效能耗最小为指标,建立整车功率模型,寻求最佳能量分配输出。例如文献[9]中采用瞬时优化策略,在一个控制周期内,将动力电池和燃料电池的能耗标定为一个目标函数,实现蓄电池和燃料电池的能量分配方案。还有一种构建模型的全局优化,例如文献[13-14]中采用马尔科夫链建立驾驶员需求功率概率模型,以等效能耗最小为目标函数进行功率分配,在实际行车中再修正概率模型。还有其他一些算法,例如模拟退火、遗传算法等,采用这些算法的前提条件是要预知未来的工况,在实际应用中只能作为静态的参考性评估基准[15-17]。
在以上的研究中,主要考虑整车等效能耗最少,而较少考虑电池的寿命。动力蓄电池(尤其是锂电池)生产成本较高、价格不菲,多报废一块电池则增加了整车成本,而且报废的蓄电池回收很困难,会对环保造成压力,把延长电池寿命纳入总体综合考虑范围。本文研究燃料电池/锂电池FCEV的能量分配算法,在电动机需求功率和电池SoC 值的约束规则下,提出一种最优化的指标,指标蕴含了燃料电池能耗(效率)与锂电池寿命指数2 个参数,根据此最优化指标进行能量分配,将计算结果离散为表格置入整车控制器中,实现FCEV的能量分配最优控制。
1 燃料电池混合动力车功率分配
燃料电池混合动力汽车的动力系统包括电动机、燃料电池、60Ah 的锂电池、DC/DC 转换器等,各部件之间通过电气母线实现物理连接。燃料电池作为主能量源,由于燃料电池动态特性比较软,不能提供瞬间启动、加速、爬坡时的大功率,由锂电池补足其电流,也吸收燃料电池多余功率以及回收制动能量等,锂电池瞬时电流可达额定电流的10 倍左右。FCEV 的动力结构如图1 所示:

图1 FCEV动力结构简图
图中各变量定义如下:Pm为电动机需求功率;Pbus为母线输出功率;Pb为锂电池输出功率;ηfc为燃料电池效率;ηdc为DC/DC转化效率;ηm为电动机效率。
功率流程关系如下:

因此,

由式(4)可见蓄电池功率与燃料电池输出功率之间的关系。当需求功率Pm确定以后,根据功率分配规则以及综合指标最优计算,在上式的约束条件下,得到二者功率的分配值。
由于二者的电压基本恒定(48 V),因此根据功率可计算出各自的输出电流,通过调节DC/DC 的PWM和燃料电池的调节阀门,调节各自的输出电流,共同为电动机供电。
2 需求功率的计算
2.1 驾驶员意图解释分析
在国内外研究中,一般都是将驾驶员意图解释为电动机功率(基本正比于电枢电流),即需求功率直接正比于踏板开度,举例而言:在速度为零时踩下50%的踏板,则解释为50%的转矩,即以50%的加速度加速,而实际上驾驶员希望得到50%的速度,在启动的时候应当以100%的加速度加速。文献[14]中已经注意到这个问题,提出:当电动机转速接近零的时候,较小的踏板开度应解释为较大的转矩(电流)以克服起步阻力,一旦起步后转矩应迅速下降,使汽车起步比较平稳,符合驾驶员起步意图。并给出在几种不同油门开度命令情况下,期望输出转矩随转速变化的一族非线性曲线。如图2 所示。

图2 输出转矩曲线
该研究者认为,期望转矩应当随着电动机转速的升高而非线性地减小,当转速升高到期望值,即使开度为100%,输出转矩也应当降到0,把油门开度与期望速度紧密相关联,但是并未通过精确的计算明确开度和期望速度的数学关系,使得曲线配置有些不方便,另外,对于不同的负载(例如爬坡),期望转矩曲线也应当有所变化。
2.2 控制结构设计
根据以上对车辆行驶分析,驾驶员意图实际上体现了对速度的要求。本文提出新的驾驶意图解释,并由此设计如下的闭环功率计算和分配算法,要点如下:
(1)将驾驶员意图解释为需求车速vr,即需求车速与踏板开度成单调增接近正比关系。
(2)采用带限幅的PI 控制器计算出需求输出功率,使驱动转矩稳定,母线电流平滑、可控、超调小、自动限速,并能方便实现对电池的寿命保护。相对于将开度解释为需求功率,其启动速度会略有下降,可通过调节启动阶段的控制参数进行补偿。
(3)根据PI 控制器计算出的需求功率Pm,再根据本文的能量分配优化算法,计算出燃料电池能提供的功率Pfc和锂电池能提供的Pb,以及二者的输出电流,从而调节各自的电流输出,二者一起为电动机供电。速度控制结构框图如图3 所示。

图3 速度控制结构框图
2.3 需求车速的计算
设踏板开度为α(0~1),车辆限速值为vmax,则当前需求速度:

式中:vmax为当前负载下的限速值;vmax_N为额定限速值;TL为当前负载转矩;TN为额定负载转矩;Im为电枢电流;CT为转矩常数;B为黏滞系数;ω 为电动机角速度;J为转动惯量。
式(5)是需求车速与当前开度以及当前限速的关系;式(6)是当前最大限速与额定最大限速的关系,由于系统最大输出功率是一定的,因此最大限速与当前负载转矩TL成反比;式(7)是电动机的动力学方程。根据式(6)、(7)可得vmax,再根据式(5)可得vr。
在式(5)中加入指数环节(1 -e-3α)是为了使在踏板值较大时,增强需求车速的平滑性,防止振荡,而在踏板值较小时提高敏感度,这是根据驾驶实测数据和人体工效需求而得出的经验公式,这样的特性更符合行驶实际情况。本课题研究的是燃料电池游览车,当vmax_N=40 km/h,TL=TN时,需求车速与踏板开度的关系如图4 所示:
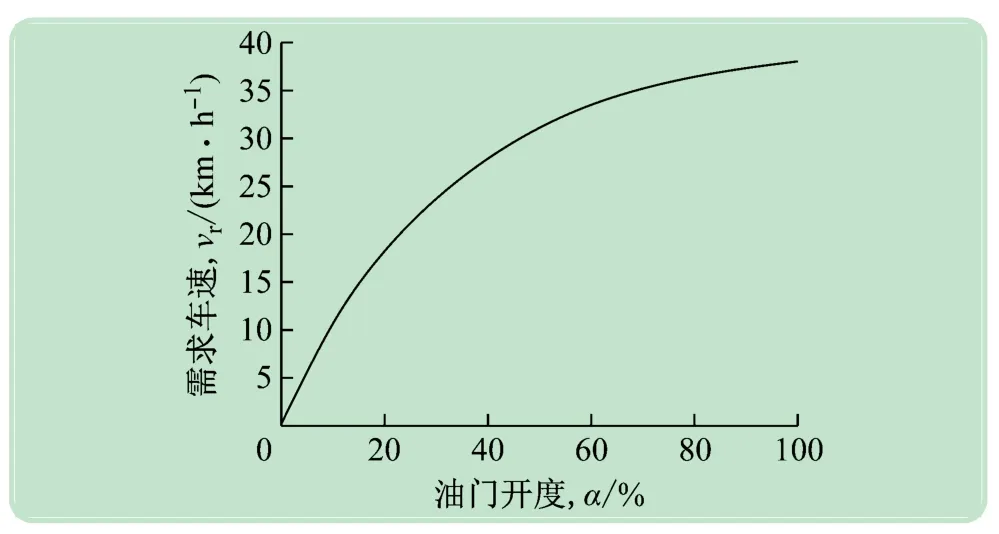
图4 需求车速-踏板开度曲线
当车辆处于上坡情况或负载较重时,限速值vmax应当有所下降,所以按照式(6)可计算出当前的负载转矩(式中各参数可辨识获得),按式(7)计算出重载时的限速值,例如TL=1.5TN时,vmax=26.7 km/h,从而实现自动换挡。
限速值可进行一定的步长分档(例如5 km/h 为一等级),避免频繁的限速切换。
3 功率的最优分配方案
3.1 能量分配的原则和规则
能量分配既要控制车行速度,也要保证电池的使用安全,在满足以上的情况下尽量使系统的效率最高、电池的使用寿命最长。因此,确定系统的能量分配原则如下:
(1)保证燃料电池和锂电池的安全;
(2)保证车辆平稳启动及正常行驶;
(3)当车辆下坡(反充电)或者停车期间,电池SoC值低于最佳区上限时,FC对锂电池充电;
(4)当锂电池SoC 值低于最佳区下限,而车辆正常行驶或者启动时,由FC 单独承担功率,若达不到需求功率,则给出相应信号,车辆减速乃至停车,保护锂电池安全;
(5)当锂电池SoC 值高于最佳区下限,且车辆正常行驶或启动时,由FC和锂电池共同承担功率,其功率分配由最优化算法得到,详见3.3(3)。
由以上原则确定能量分配规则,定义锂电池SoC值节点和电动机需求功率的不同节点
SoC1:最佳工作区域下限。低于此值则锂电池停止工作(一般为20%);
SoC2:最佳工作区域上限。大于此值时锂电池停止被充电(一般为80%);
Pm1:燃料电池单独提供功率时的最大电动机需求功率;
Pm2:电动机最大需求功率(一般是启动功率)。
能量分配总规则见表1,其中fc 表示燃料电池,b表示锂电池。

表1 能量分配总规则
3.2 FC、B同时工作区能量最优计算分析
由表1 可见,在功率需求较大且锂电池SoC 值不低于最低值时,fc和b同时工作,则需要分配好FC 和B的功率。
将系统总体耗能最小和锂电池寿命最长二者都纳入考虑范围。系统耗能最小可以归结为燃料电池效率值最高,因为燃料电池效率波动大,且经过DC/DC 转换,而锂电池是直接向母线供电,不用考虑效率而应主要考虑其寿命。锂电池寿命可由寿命曲线获得。本文引入双目标函数,函数中包含整车效率以及锂电池的寿命指数,在功率约束条件下,在每一个需求功率的离散值,通过计算机求解获得最佳功率分配,使目标函数达到最大值。
3.3 目标函数的构造
(1)燃料电池效率。燃料电池的效率如图5 所示,由图可见,燃料电池的效率最高值约为0.8,当功率为0.3 kW时达到最大。0.3~2.7 kW间是高效工作区,2.7 kW以上则特性变得较软,效率迅速降低。

图5 燃料电池效率曲线
(2)锂电池寿命指数。锂电池最佳供电电流为0.7C(C为锂电池的额定电流),在其两侧,则逐渐下降,其放电寿命(σb)曲线如图6 所示。

图6 锂电池放电寿命曲线(p.u.)
锂电池的寿命长短还与其充放电次数有关,但充放电次数与整车工作时长、作功总量相关,这是由车辆使用所决定,而无法通过功率(或电流)分配算法改变,因此,在以下的讨论中,其寿命参数以寿命指标(σb)为代表。
(3)双目标函数及约束条件。根据燃料电池和锂电池二者综合效能指标最优,并考虑锂电池的SoC 值对其放电性能的影响,本项目中构造如下效能函数:

式中,σ为整车效能综合指标。式(8)右边第1 项为效率,分子为最后输出功率,分母为输入功率。ηb为锂电池等效效率,因为锂电池的电量来自于燃料电池通过DC/DC充电电量,充电电流设定为锂电池最佳值0.5C(即30 A),从而得到等效的效率为:

从需求功率来说,课题所选择的电动机其额定功率为PN=5 kW,最大启动功率为16.8 kW。燃料电池最大输出功率为5 kW。锂电池为60 Ah,最大瞬时输出电流10 C,母线电压为48 V 时,最大输出功率28.8 kW。
在指定需求功率为Pm的情况下,求解下述问题:
已知条件
需求功率为Pm(0~16.8 kW)
目标函数

这属于非线性约束条件下的非线性极值求解问题。由于约束条件与目标函数的关系只能用实测曲线的点进行描述。因此,本极值问题需通过计算机搜索求解。在本例中,采用步长加速法进行最小值的搜索。
3.4 最优化计算结果
使Pm在0~16.8 kW之间变化,精度为0.1 kW。在以0.1 为步长的SoC 值下进行仿真计算,在式(8)中,以SoC =0.8 为例,在Matlab中进行计算,以Pm为横坐标,Pfc、Pb为纵坐标,绘出曲线如图7 所示,并绘出整车效率曲线和B的寿命曲线如图8 所示。

图7 FC和B的功率分配曲线(本算法)

图8 FC效率和B的寿命曲线(本算法)
3.5 原有算法的功率分配
在原有算法中,不考虑锂电池的寿命,只考虑整车的效率。即在式(8)中取消第2 项。其功率分配以及效率分别如图9、10 所示。

图9 fc和b的功率分配曲线(原算法)
3.6 在城市行车工况下的功率和效率变化曲线
在城市普通行车工况下,控制器输出需求功率,根据优化算法进行分配,以及原有算法进行分配,整车效率和锂电池寿命对比分别如图11~14 所示。

图10 fc效率和b的寿命曲线(原算法)
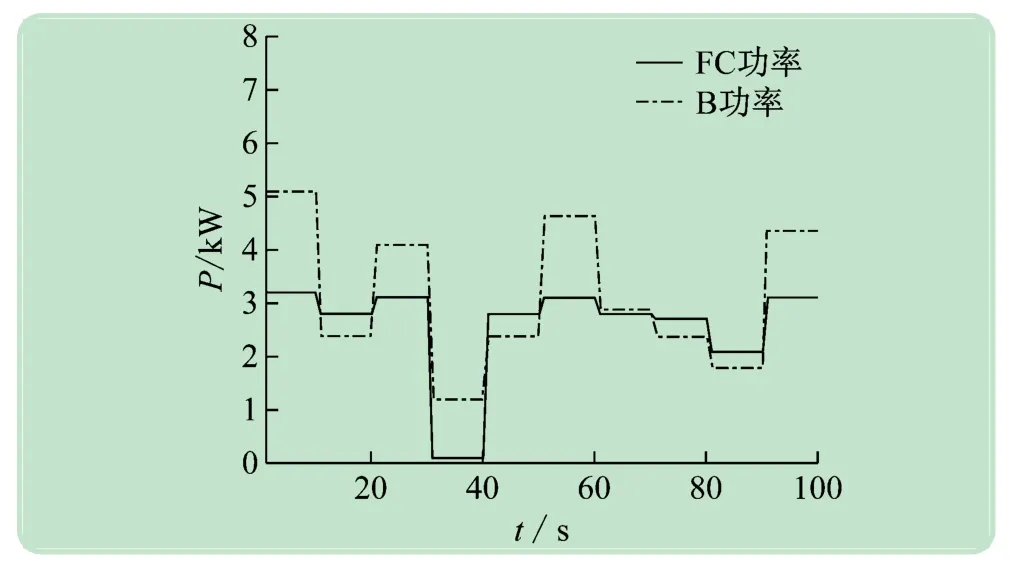
图11 工况下fc和b的功率曲线(本算法)

图12 工况下fc和b的功率曲线(原算法)
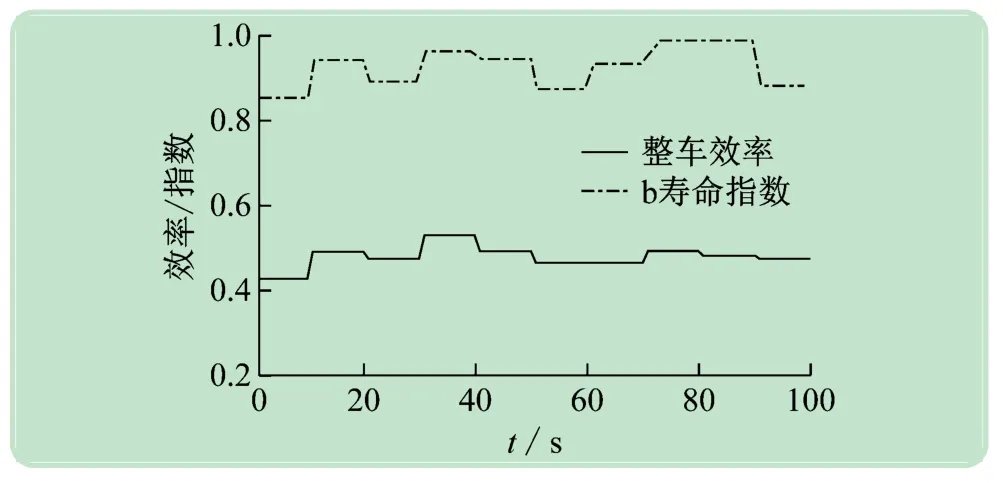
图13 工况下fc效率和b寿命曲线(本算法)

图14 工况下fc效率和b寿命曲线(原算法)
在行车期间,燃料电池和锂电池的输出平均功率和平均效率,见表2。
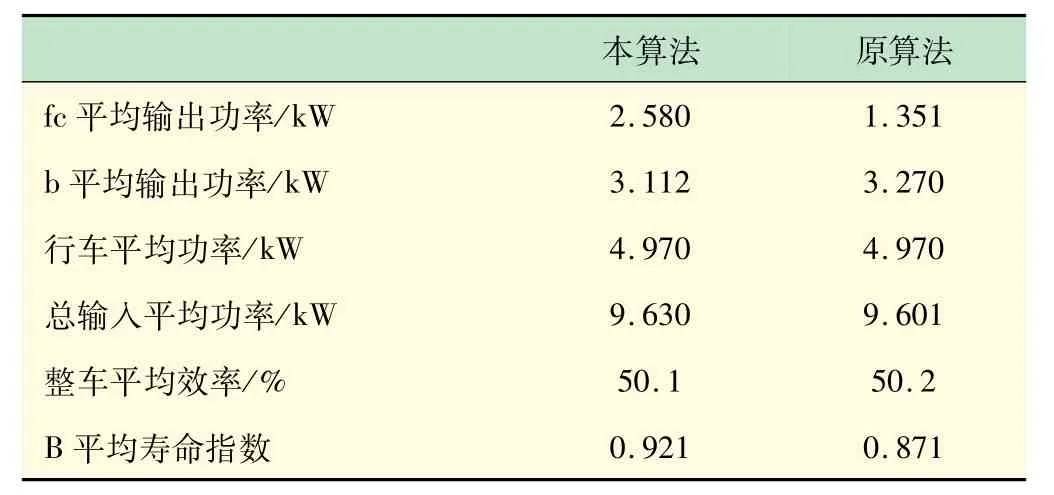
表2 本算法与原有算法效能之对比
4 结语
本文针对燃料电池和锂电池混合动力电动车,研究了能量管理算法,采用基于规则和效率、寿命指数复合最优算法,在相同的行车和需求功率情况下,与未使用优化算法相比,整车效率几乎相等,而锂电池寿命指数却提高了5%,降低了系统总成本,减少了由于电池报废造成的环境污染,该优化策略对FCEV 能量管理具有一定的借鉴价值。
