基于碰撞行为预测的智能网联汽车状态控制的研究
2021-02-28陈欣宇李沁颖
陈欣宇 李沁颖

摘要:智能网联汽车状态控制是网联汽车自动化驾驶的关键技术,目前受到了广泛的关注,但存在无法准确预测汽车碰撞行为以及无法对网联汽车状态进行控制的研究难点。针对上述问题,本文结合大数据技术、碰撞行为预测、智能网联汽车的状态控制,以实现车辆的安全驾驶。构建万车事故率、夜间事故比例、人为因素事故三维路面危险程度分析模型对智能网联汽车的碰撞行为进行危险程度划分。同时,通过车辆传感器获取车辆当前驾驶状态信息并结合危险程度划分结果,应用蒙特卡洛模型分析车辆实际行驶过程中的碰撞风险率,根据风险值及危险程度对当前车辆做控制决策,从而有效地降低交通事故发生率,提高车辆驾驶的安全性和有效性。
关键词:智能网联汽车;碰撞行为预测;状态控制
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2021)35-0077-03
Research on Intelligent Networked Vehicle State Control based on Collision Behavior Prediction
CHEN Xin-yu, LI Qin-ying
( Jiangxi University of Technology ,Nanchang 330200,China)
Abstract:The state control of intelligent connected vehicle is the key technology for the automatic driving of connected vehicle, which has received extensive attention at present, but there are some difficulties in the research, such as the inability to accurately predict the collision behavior and the inability to control the state of connected vehicle. Aiming at the above problems, this paper combines big data technology, collision behavior prediction and state control of intelligent networked cars to realize safe driving of vehicles. A three-dimension road hazard analysis model, including the accident rate of 10,000 vehicles, the proportion of accidents at night and the human factors, was constructed to divide the collision behaviors of intelligent connected vehicles into hazard degrees. At the same time, through the vehicle sensors vehicle state information and combining with the current driving dangerous levels as a result, the application of monte carlo model analysis in the process of vehicle real driving collision risk, according to the risk value and the danger degree to the current vehicle control decisions, effectively reduce the incidence of traffic accidents, improve the driving safety and effectiveness.
Key words: intelligent network vehicle; collision behavior prediction; state control
1引言
隨着“互联网+”时代的到来,物联网、大数据、云计算等新一代信息技术迅速成长,汽车的智能化,车联网的构建、智能道路交通系统的形成和智慧城市的建设是人民日益增长的美好生活需要的迫切要求。文献[1]指出要推动智能网联汽车产业的发展,就要符合中国国民的需求,同时要在关键技术、车辆安全等方面进行突破。文献[2]提出随着智能网联汽车产业的发展,人为因素是导致交通事故发生的重要原因之一。文献[3]则提出道路交通事故率也是交通事故发生的重要因素。因此,文献[4]指出智能网联汽车技术和车辆风险碰撞受到了广泛的关注。碰撞行为预测作为智能网联汽车状态控制的未来发展趋势,起着不可或缺的作用,文献[5]提出传统车辆的碰撞行为预警只能预警是否会发生碰撞,而无法判别即将发生碰撞的严重程度,并且也无法提前提醒驾驶员去做出反应。本文利用大数据等技术构建三维路面危险程度分析模型,同时应用蒙特卡洛模型分析车辆实际行驶过程中的碰撞风险,根据风险值及危险程度对当前车辆状态做出控制决策。
2智能网联汽车危险碰撞分析模型
2.1智能网联汽车碰撞行为
碰撞行为是指两个或多个物体发生相对运动时,它们的运动状态在极短时间内发生了显著变化的行为过程。汽车在高速行驶的过程中,由于驾驶员反应不及时、周围环境变化、路况突变等各种原因,使得车辆的运动状态发生改变,从而导致碰撞行为的产生[6]。碰撞行为产生的原因有三种:一是由于汽车行进的路段是事故常发生路段;其次是汽车行驶的时间范围;最后则是由于驾驶人对危险作出反应不及时。为了综合考虑这三类使得汽车产生碰撞行为的原因,本文通过车辆传感器来获取车辆当前驾驶状态信息以及事故路段信息。
2.2获取事故路段信息
信息感知是智能网联汽车的关键,要真正实现无人驾驶的目标,就要对车辆的状态参数和周围环境有一个非常清晰的控制,而信息的获取也依赖先进的传感器。车载电脑通过接收传感器获取的车辆周围的路段信息以及驾驶状态信息,连接互联网从云服务台获取大量万车公里事故率、夜间事故率及人为原因事故比例等相关信息,同时利用大数据技术对数据进行清理和处理,并存入磁盘中以方便瞬时调用数据检测,为发明提供建立模型分析路段危险程度的资料做好前期工作。图1为获取事故路段信息的基本流程图。
2.3建立危险程度分析模型
2.3.1模型危险参数的确定
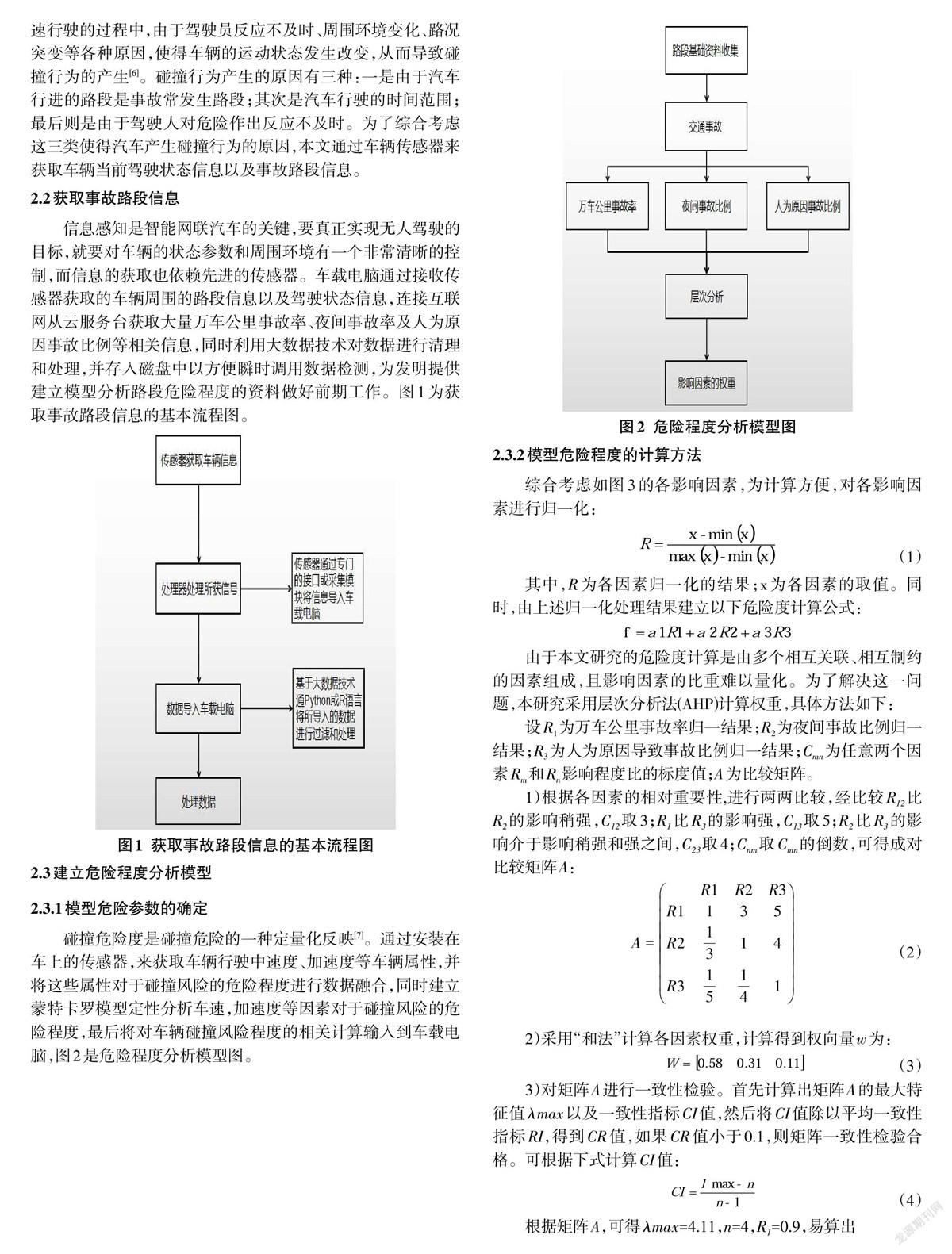
碰撞危险度是碰撞危险的一种定量化反映[7]。通过安装在车上的传感器,来获取车辆行驶中速度、加速度等车辆属性,并将这些属性对于碰撞风险的危险程度进行数据融合,同时建立蒙特卡罗模型定性分析车速,加速度等因素对于碰撞风险的危险程度,最后将对车辆碰撞风险程度的相关计算输入到车载电脑,图2是危险程度分析模型图。
2.3.2模型危险程度的计算方法
综合考虑如图3的各影响因素,为计算方便,对各影响因素进行归一化:
(1)
其中,R为各因素归一化的结果;x为各因素的取值。同时,由上述归一化处理结果建立以下危险度计算公式:
由于本文研究的危险度计算是由多个相互关联、相互制约的因素组成,且影响因素的比重难以量化。为了解决这一问题,本研究采用层次分析法(AHP)计算权重,具体方法如下:
设R1为万车公里事故率归一结果;R2为夜间事故比例归一结果;R3为人为原因导致事故比例归一结果;Cmn为任意两个因素Rm和Rn影响程度比的标度值;A为比较矩阵。
1)根据各因素的相对重要性,进行两两比较,经比较R12比R2的影响稍强,C12取3;R1比R3的影响强,C13取5;R2比R3的影响介于影响稍强和强之间,C23取4;Cnm取Cmn的倒数,可得成对比较矩阵A:
[A=R1R2R3R1135R21314R315141] (2)
2)采用“和法”计算各因素权重,计算得到权向量w为:
(3)
3)对矩阵A进行一致性检验。首先计算出矩阵A的最大特征值λmax以及一致性指标CI值,然后将CI值除以平均一致性指标RI,得到CR值,如果CR值小于0.1,则矩阵一致性检验合格。可根据下式计算CI值:
(4)
根据矩阵A,可得λmax=4.11,n=4,R1=0.9,易算出
因为CR小于0.1,所以可以将矩阵W作为各因素的权向量。由上述权值的计算结果可得危险度计算公式为:
[f=0.58R+0.31R2=0.11R3] (5)
f表示危险度;R1,R2,R3表示各因素归一化结果。将上述建模方法及相关公式所得出计算结果导入车载电脑中。
3 智能网联汽行为预测
3.1数据处理
利用交通信息中心TIC计算路侧单元RSU所辖通信区域内车道上任意两车Ti、Tj;之间的碰撞概率p= f(Ti,Tj);并设定:绝对安全距离(Sa);前方车辆突然制动时,即速度瞬时为零,保证后方车辆不与之发生碰撞的安全距离;相对安全距离(Sr):前方车辆遇到危险情况减速,后车随之减速,保证后方车辆不与之发生碰撞的安全距离;因此,车辆碰撞风险为:
[p=number(Sr<dist<Sa)/number] (6)
式中:number(Sr<dist<Sa)表示二维平面上车间安全距离dist落于绝对安全距离Sa和相对安全距离Sr的次数,number为总次数。同时采用蒙特卡洛模拟的方法对上述p进行求解:
[Pi,j=f(Ti,Tj)={0dist>SaCLSr≤dist≤Sa1dist<Sr}] (7)
3.2行为預测
针对危险程度的分析以及综合考虑(2.2)影响因素,为计算方便,借用LEC安全评估法的思想,本文确定风险程度为D ,[D=f*Pia],其中:f是路线危险程度,Pia是车辆碰撞风险程度。
由计算结果可知,D值越大,则说明风险程度越大,其基于概率分布在0-1之间,本文对风险程度进行分级,0~0.04:可接受的风险;0.04~0.16:可能的风险;0.16~0.36:中等风险;0.36~0.64:高风险;0.64~1:极高的风险。但值得注意的是,LEC风险评价法对危险等级的划分,一定程度上凭经验判断,根据实际情况予以修改。
3.3智能网联汽车状态控制
当汽车碰撞风险处于不同的风险程度时,车载电脑可以根据实时的智能网联汽车行为预测提出相应的警示,而对于不同程度的危险,车载电脑也会给出不同的应对策略。在可接受的风险范围内,由车载电脑根据智能网联汽车的碰撞行为预测自动对其状态进行控制;相反,在超出可接受风险范围时,车载电脑发出警报提示并对汽车的四轮转角进行全方位的严密监控,同时通过对汽车碰撞行为的实时预测,不断对汽车的四轮转角进行操控以达到对汽车状态的控制。
4小结
在大数据技术背景下,将碰撞行为预测、智能网联汽车状态控制结合起来,以实现车辆的安全驾驶,从云服务器中获取大量万车公里事故率、夜间事故率及人为原因事故比例等相关信息构建路面危险程度分析模型,通过车辆传感器获取车辆当前驾驶状态信息,存入磁盘中进行瞬时数据检测,并应用蒙特卡洛模型分析车辆实际行驶过程中的碰撞风险率,提前对汽车的行为进行预测,同时根据危险度标准对智能网联汽车的状态进行控制,进而有效降低交通事故的发生率,并减少人员伤亡及财产损失。
参考文献:
[1] 黎宇科,刘宇.国外智能网联汽车发展现状及启示[J].汽车工业研究,2016(10):30-36.
[2] 孔令铮.交通事故致因中的人为因素分析[J].中国安全科学学报,2013,23(1):28-34.
[3] 钟茂华,刘铁民,韦星,等.中国道路交通事故初步统计分析[C].中国国际安全生产论坛,2002.
[4] 李克强,戴一凡,李升波,等.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报,2017,8(1):1-14.
[5] 郭道一.基于深度学习和仿真的汽车碰撞损伤预测方法[D].大连:大连理工大学,2019.
[6] 邓婕.浅谈汽车碰撞过程分析及安全设计要点[J].中国战略新兴产业,2018(44):233.
[7] 陈天德,黄炎焱,张永亮.基于碰撞危险度的无陷阱动态航路规划[J].系统工程与电子技术,2019,41(11):2496-2506.
【通联编辑:李雅琪】
