改进的滑模观测器实现PMSM无传感器控制
2021-02-05张鑫张传金
张鑫,张传金
(1.江苏联合职业技术学院 南京工程分院,江苏 南京 211135;2.江苏建筑职业技术学院 智能制造学院,江苏 徐州 221116)
无传感器控制技术增强了电机驱动系统的可靠性,且具有低成本、免维护、环境适应性强等优势,因而备受国内外学者及工业界关注。目前,该技术已在风机、泵、电动汽车、家电、工业机床等领域取得了一定应用[1-4]。无位置控制的实现策略可分为零低速域信号注入法和中高速域模型法。模型法中滑模观测器(sliding mode observer,SMO)因具有对参数变化不敏感、强鲁棒性等优良特性,得到广泛的研究与应用。其中,一阶滑模观测器因结构简单、便于设计,得到了实质性应用。而基于一阶SMO的无位置控制系统中,用于减小颤振的低通滤波器(low-pass filter,LPF)给反电动势(electromotive force,EMF)提取带来了相位延迟与幅值衰减的问题,故常需要相位补偿环节[5]。而随着转速的降低,补偿环节的补偿作用变差,位置误差亦增大,带载能力大大下降。此外,现场应用中,“恰好”的补偿系数不易得到,调试难度较大。
针对该问题,本文提出用自适应复数滤波器(self-adapting complex-coefficient filter,SACCF)替代LPF的无位置控制实现方法,简写为SACCFSMO。目前,复数滤波器在同步并网、正负序分量分离[6-9]及电网阻抗估算[10]中取得了一定应用。其在中心频率处具有无相位延迟、无幅值衰减的优异特性[6],使之特别适用于反电动势的提取。与估计转速相关的自适应律使得复数滤波器能在较宽速域内实现对反电动势的精确提取,且在整个速域内具有相当的颤振水平。自适应复数滤波器的引入从根本上剔除了补偿环节,位置误差不再随转速降低而增大,系统带载能力得到提升。仿真和实验结果验证了所提策略的有效性和可行性。
1 PMSM扩展反电动势模型
d-q坐标系下,永磁同步电机(PMSM)的数学模型可写

其中

式中:ud,id,Ld,uq,iq,Lq分别为d,q轴电压、电流及电感;Ψf,Rs分别为永磁体磁链与定子电阻;ωe为电机电角速度;p为微分算子。
将式(1)变换到静止α-β坐标系下,可得:
由式(2)易知,若能精确地得到Eα,Eβ,则转子位置θe可直接计算或通过位置估计器得到。
2 SACCF-SMO设计
图1为SACCF-SMO实现永磁同步电机无位置控制系统框图。图1中,由于SACCF能无相位延迟地滤波得到估计反电动势,故系统不再需要相位补偿环节。估计转速反馈至SACCF,用于中心频率与截止频率的自动调节。

图1 SACCF-SMO实现PMSM无位置控制系统框图Fig.1 The block diagram of PMSM sensorless control system based on SACCF-SMO
2.1 滑模观测器设计
预设滑模面为

根据式(2),可建立基于电流误差的滑模观测器为

式中:k为滑模增益。
式(2)减去式(4)得到电流误差方程为

滑模观测器的到达条件为

以α轴为例,简要推导其稳定性判据。将式(5)代入式(7),可得:

同理,β轴也可得到类似表达式;且考虑到,当下式成立时,滑模观测器是稳定的[11-13]:

式(9)可作为选取滑模增益的依据。
2.2 SACCF及其参数选取

式中:ωr,ωc分别为中心频率与截止频率。
图2所示为ωr分别为700 r/min(ωr1)和 2 500 r/min(ωr2)时,不同截止频率下,式(10)的 Bode图。由图2易知,复数滤波器在中心频率处,不存在幅值衰减与相位延迟,特别适用于此处的提取。

图2 不同截止频率下,SACCF的Bode图Fig.2 The Bode diagram of SACCF with different ωcvalues
根据图1与式(10)可得:


式中:Zα,Zβ为未经处理的Eα,Eβ直接估计值,含有大量谐波。
电机运行中,反电动势的频率随着转速而变化。为了准确地提取出反电动势,式(12)中的中心频率与截止频率应随着转速而自动调节。为此,本文假设中心频率与截止频率与估计转速存在如下线性关系:

式中:ksa为自适应系数。
为探究ksa取值大小与CCF滤波效果的关系,将式(13)代入CCF的幅频、相频表达式,得到下式:
由式(14)绘出不同ksa时,CCF的Bode图,见图2。观察曲线的变化趋势,易知:ksa越小,对谐波的抑制作用越强。后续的无位置系统仿真发现:ksa过大时,电流振荡较大;ksa过小时,电流将发散;通过调节,本文取0.45。
据式(12)、式(13)可得到SACCF的实现框图,如图3所示。

图3 SACCF实现框图Fig.3 The implement block diagram of SACCF
3 仿真分析
为验证本文所提SACCF-SMO的估计性能,根据图1在Matlab/Simulink中搭建仿真模型,电机参数为:额定转速nN=3 000 r/min,定子电阻Rs=0.1 Ω,永磁体磁链Ψf=0.225 Wb,d轴电感Ld=0.95 mH,q轴电感Lq=2.05 mH,极对数pn=4,等效转动惯量J=0.195 kg·m2。预设最高转速为2 500 r/min,根据式(19)将滑模增益k选为260。锁相环(phase-locked loop,PLL)参数基于“带宽”概念进行选取[14],最大转速加速度为1 500(r·min-1/s);最大允许暂态角度误差为10°,PLL带宽选为65 rad/s。转速环控制参数kp,ki为0.34和3.4。PWM开关频率为5 kHz,系统采样频率为10 kHz。仿真结果如图4~图6所示。
图4比较了传统带相位补偿的SMO与SACCF-SMO在提取时的性能差异。相比传统SMO而言,SACCF-SMO不存在幅值衰减与相位延迟,无需相位补偿。此外,对于固定的自适应系数,SACCF在不同中心频率处的谐波抑制作用相当,如图2所示。该特性的优势在于,系统颤振不再随转速降低而增大,而是呈现出等颤振水平。图 4 中,700 r/min 与 2 500 r/min时,具有相等的颤振水平,即是对该特性的较好验证。

图4 SMO与SACCF-SMO提取性能比较Fig.4 The performance comparison of SMO and SACCF-SMO in extracting
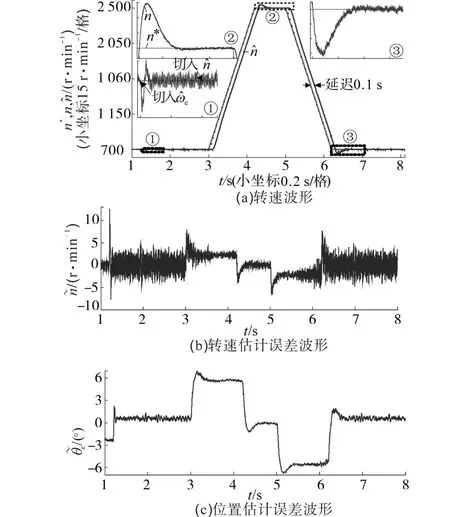
图5 SACCF-SMO无位置控制系统空载仿真波形Fig 5 The simulation waveforms of sensorless control system realized by SACCF-SMO
图5~图 6所示为 700~2 500 r/min速域内,SACCF-SMO无位置控制系统空载、带40%最大电磁转矩负载(Temax)时的仿真波形。图5和图6中,电机以估计位置启动,1.2 s时刻SACCF开始采用估计转速,1.6 s时刻转速环切入估计转速。观察仿真波形易知:转速跟踪性能良好,系统基本呈现等颤振水平;转速与位置估计误差均控制在较小水平,转速最大误差为15 r/min,位置最大误差为7.1°;稳态时,转速不存在偏差,位置误差控制在0.55°以内。良好的误差控制能力使得SACCF-SMO无位置系统具有更强的带载能力。

图6 SACCF-SMO无位置控制系统带载0.4Temax仿真波形Fig.6 The simulation waveforms of sensorless control system realized by SACCF-SMO with 0.4Temaxload
4 实验验证
上述仿真结果表明SACCF-SMO无位置控制系统具有无需相位补偿环节、等颤振水平、带载能力更强等优势。为进一步确认这些特性,进行实验验证。实验用PMSM参数、PWM开关频率及采样频率与仿真一致,两电平逆变器,主控芯片为TMS320F2812,D/A输出芯片为TLV5610,直流母线电压为540 V。滑模增益仍选260,自适应系数通过实验调节得到,为0.5。转速环比例、积分系数为2,20。实验波形如图7~图8所示,加减负载均为0.4Temax。

图7 1 000 r/min、空载时,标幺的估计反电动势波形Fig 7 The waveforms of normalized estimated back EMF with 1 000 r/min and no load

图8 700~2 500 r/min速域内,SACCF-SMO无位置控制系统带载0.4Temax实验波形Fig 8 The experimental waveforms of sensorless control system realized by SACCF-SMO with 0.4Temaxload within 700~2 500 r/min speed range
5 结论
针对传统一阶SMO无位置控制系统中低通滤波器产生的相位延迟,及后续的相位补偿环节中存在的位置误差随转速降低而增大及调试难度大等问题,提出SACCF-SMO无位置实现策略。在较宽速域内,SACCF对反电动势的提取具有无相位延迟、无幅值衰减、等颤振水平等优良特性。SACCF的引入,从本质上剔除了相位补偿环节,简化了系统结构,并且系统带载能力得到大大的提升,颤振水平得到进一步削弱。
