基于三维激光点云数据的地下管廊BIM模型创建
2021-02-04杨明龙夏永华
林 伟,杨明龙,王 冲,夏永华
(1.昆明理工大学国土资源工程学院;2.云南省高校高原山区空间信息测绘技术应用工程研究中心,云南昆明 650093;3.中国电建集团 昆明勘测设计研究院有限公司,云南 昆明 650200)
0 引言
传统的地下管廊三维建模方法大多基于二维数据进行创建,形成的三维模型只是实现了外观的可视化,并没有工程属性,无法抽取施工图纸[1]。三维激光扫描技术和BIM 技术的出现提供了新的数据获取与建模方法,不仅提供更加逼真的三维模型,还能赋予模型更多的语义信息,为地下管廊的后期运营与维护提供数据支持。
三维激光扫描技术是通过三维激光扫描仪发射激光,获取被测物体表面三维坐标、反射强度等多种信息的非接触式主动测量技术,又称为高清晰测量(High Definition Surveying HDS)技术[2],能满足面积大、分辨率高的测量要求,为快速建立物体的三维模型提供了全新的技术手段[3]。建筑信息模型(Building Information Modeling,BIM)是一种多维应用的模型信息集成技术,可使建设项目的所有参与方从概念产生到完全拆除的整个项目生命周期内都能在模型中操作信息及在信息中操作模型[4]。能将建筑物三维数字化模拟还原,同时具备详细的内部空间几何及功能语义信息,是信息技术在建筑行业应用的典范[5],具有可视化、一体化、参数化、仿真性、协调性、优化性、可出图性等特点。三维激光扫描技术与BIM 技术结合研究较多,如Soilán 等[6]提出一个半自动化框架,该框架以移动制图系统的原始点云作为输入,输出符合IFC 要求的文件,对高速公路中每个车道的路线和中心线进行建模;Bassier 等[7]利用点云数据重建BIM 中墙对象的拓扑关系;智鹏等[8]重点研究了BIM、图像轻量化、大数据、三维激光扫描、自动监测等关键技术在盾构法隧道施工中的融合创新,提出基于BIM 的信息化施工管理总体解决方案;王代兵等[9]利用BIM 技术与三维激光扫描仪,在幕墙的深化设计、现场施工环节进行逆向建模指导施工;刘智敏等[10]将BIM 技术应用于桥梁设计,实现了工程项目设计阶段的可视化展示,有效提高了工程设计的效率;徐萍飞等[11]利用BIM 参数化、集成化优势,将综合管理数据与BIM 模型数据进行集成,提出基于BIM 的工程信息管理框架,实现工程数据的实时共享。
综上所述,现阶段三维激光扫描技术和BIM 技术融合大多是直接将点云数据进行转换后导入BIM 软件进行逆向建模,但是这样的建模速度较慢。本文以昆明地下管廊模型为例,利用点云数据基于多平台进行建模并融合到BIM 中。
1 地下管廊建模技术流程
昆明市地下管线分为上下水、燃气、电力、通信、工业等,涉及近30 家产权单位,本次实验的路段是在昆明市广福路北段,地下管廊全长约7.5km,而在此路段的地下管廊主要收集沿线各类电力线和通信线,如供电、弱电、消防、治安监控、交通信号、路灯线路等,并配套建设完善的消防、照明、排水、通风、供配电、标识、控制中心及监控系统等设施。
本实验扫描的地下管廊地段近650m,首先对扫描获得的三维点云数据进行拼接、去噪、抽稀等预处理,然后利用点云数据分别创建管廊表皮模型和部件模型,最终将两大模块融合到Revit 软件中,并对BIM 模型进行精度检验。实验步骤分为数据采集、数据处理、模型创建、模型融合和精度检验,流程如图1 所示。
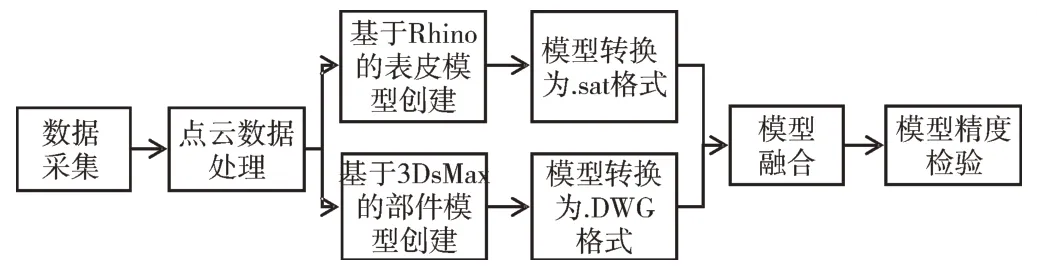
Fig.1 Technical flow chart图1 技术流程
2 数据采集及处理
2.1 数据采集
2.1.1 点云数据采集
采用的实验设备是Maptek I-Site8200 架站式三维激光扫描仪,自带后期点云数据处理软件Maptek I-Site Stu⁃dio,其参数如表1 所示。点云数据(Point Cloud Data)简称点云(PC),是通过三维激光扫描仪扫描物体表面获得的包含点三维坐标值、颜色强度信息(RGB)、反射强度信息(In⁃tensity)的点集数据[12]。
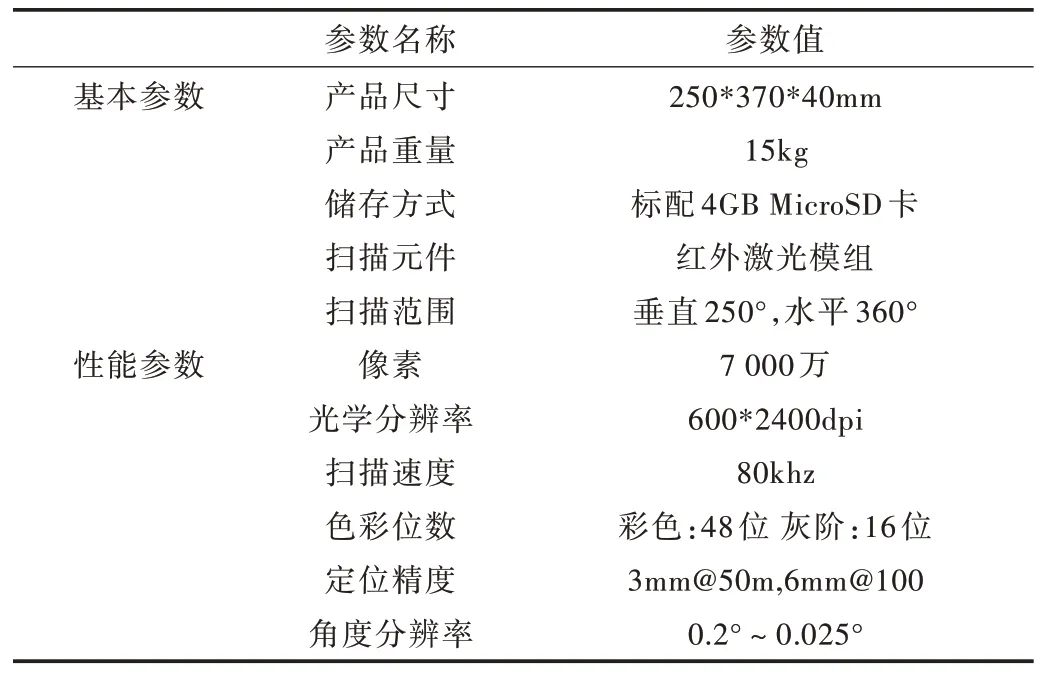
Table 1 Maptek I-Site8200 3D laser scanner parameter table表1 Maptek I-Site8200 三维激光扫描仪参数
地下管廊的点云数据采集不同于地表,其采集难度更大。因此,为了保证点云数据精度和质量,需要在地下管廊入口处布设3 个首级控制点并由入口处控制点引入坐标,从而测得反光片的三维坐标以便后期进行质量检验。在仪器扫描过程中,为了各测站数据能够准确拼接,采取布设标靶的方式辅助点云模型拼接,要求一个测站点与相邻的两个测站点至少有3 个或3 个以上标靶重叠[13]。仪器能保持最低精度要求的理论距离是100m,本次实验为了提高测量精度,将测站距离控制在50m 以内。由于地下管廊并不完全是一条直线,因此在拐角和岔口处需要多设几处站点以确保点云数据的完整性,具体布置见图2。最终采集到全长近650m 的34 个站点点云数据。
2.1.2 图片及属性数据采集
除采集点云数据外,还需采集管廊内部各部件如变电箱、管线、管线支架、管箍等图片信息以及尺寸信息,以便后期构建三维模型,其他属性信息如材质、建设年份,建设单位等也要收集,以方便后期录入库中管理。
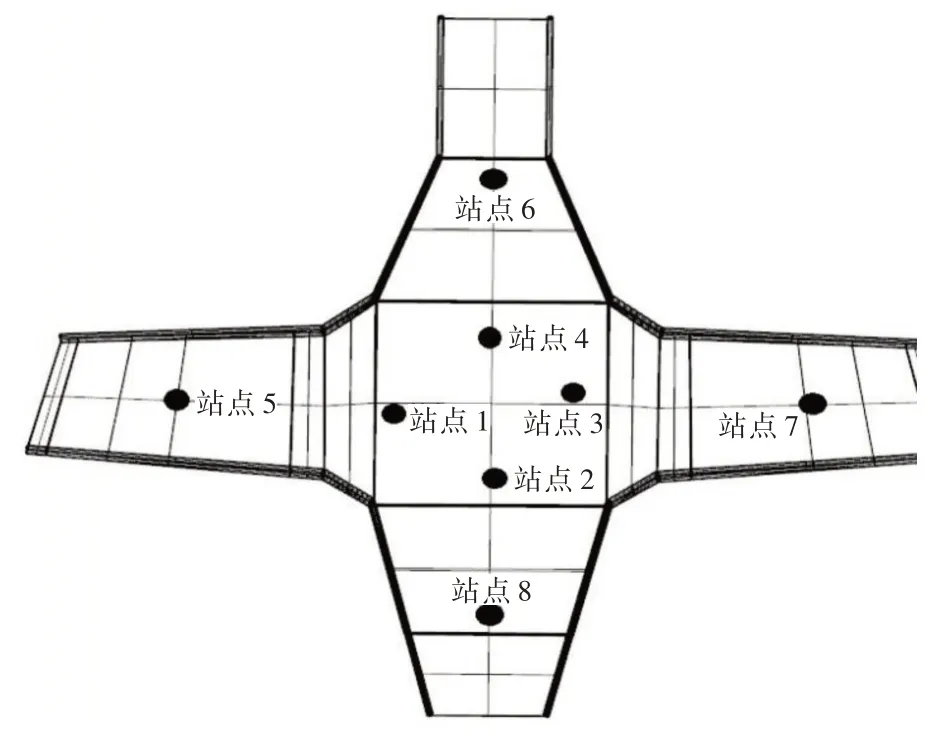
Fig.2 Site layout at the fork图2 岔口处站点布局
2.2 点云数据处理
进行点云数据预处理,包括点云站点拼接、点云去噪和抽稀。
2.2.1 站点拼接
点云数据拼接模式主要包括基于标靶的拼接、基于特征点的拼接、基于测量点的拼接以及混合拼接等方式[14]。本实验的站点拼接方式主要是基于标靶的拼接,只要已知3 个点的坐标即可完成坐标转换,实现点云配准[15]。点云数据拼接精度直接影响到地下管廊BIM 参数化建模精度[16],因此点云拼接极其重要。
点云自动配准使用最多的方法是最近点迭代算法(It⁃erative Closest Point,ICP)[17],该算法利用原始数据重叠区域的点云数据进行配准[18]。ICP 算法原理是找到原始点云与目标点云中的对应点,然后针对对应点通过最小二乘法构建目标函数,进行迭代优化,求出旋转平移参数。假设存在两组配准前的点云数据如下:

寻找欧式变换R、t,使得:

其中,R为旋转矩阵,t为平移矩阵,ICP 算法基于最小二乘法进行迭代运算,使得误差平方和达到最小值:

为求解R、t,首先定义两组点的质心并计算每个点的去质心坐标:
计算此时的旋转矩阵:


当W满秩时,对应唯一的U、V组合,求解得:

由此找到最优解。以相同的方法对其他站点进行拼接,拼接后的点云数据如图3 所示。

Fig.3 Point cloud data after stitching图3 拼接后的点云数据
2.2.2 点云去噪
扫描完成的点云数据一般都含有噪点,常见的就是离群点和与所需数据不相关物体的点云,如悬浮在空中的点云、地面堆积物点云和人的点云等,都需要对其删除。去噪前后的点云如图4、图5 所示。

Fig.4 Point cloud before denoising图4 去噪前的点云

Fig.5 Point cloud after denoising图5 去噪后的点云
2.2.3 点云抽稀
现在的三维激光扫描仪器越来越精细化,1s 内扫描的点云量可达百万级,庞大的数据量严重影响后期工作效率。点云抽稀可以减少数据量,提高运算效率和建模速度。通常的点云数据精简算法主要有基于空间分割的精简算法和基于曲率的精简算法[19],本次实验按照0.05m 间隔进行抽稀处理,如图6 所示。

Fig.6 Point cloud after thinning图6 抽稀后的点云
3 三维模型创建与融合
3.1 模型创建
3.1.1 管廊表皮模型创建
经过预处理和拼接后的点云数据可直接导入到专业三维建模软件Rhino 中进行表皮模型创作,对于截面较为简单的管线也可利用点云图像描摹获得管线的中心线和直径大小进行管线的参数化建模。详细模型见图7。

Fig.7 Skin model of pipe gallery图7 管廊表皮模型
3.1.2 管廊内部各小部件模型创建
对于结构复杂和不规则的其他部件,如交叉互联箱、管线支架、管箍、灯管和楼梯等,要根据实地采集的尺寸数据和图片利用3DsMax 软件按照实际尺寸大小构造各小部件的三维模型。用专业的三维建模软件创建的模型更加精细逼真,能带来更好的视觉效果。构造好的部件模型如图8 所示。
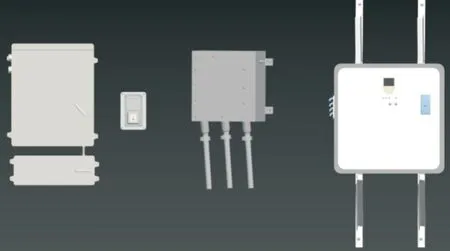
Fig.8 Small parts model图8 各小部件模型
3.2 模型融合
本实验基于多平台分别创建表皮模型和各小部件模型,因此模型融合也分为表皮模型融合与小部件模型融合两类。首先进行表皮模型融合,在Rhino 中创建表皮模型需先保存为.sat 文件,然后在Revit 中创建新的体量族并导入保存好的.sat 文件,导入模型单位与原模型一致,模型导入后进行保存;接下来直接载入到项目文件,在建筑选项卡中点击放置体量,完成表皮模型到Revit 的融合。图9是表皮模型载入到Revit 的效果图。

Fig.9 The rendering of the Rhino skin model loaded into Revit图9 Rhino 表皮模型载入到Revit 的效果展示
由于单独构造的小部件没有坐标信息,因此需要先将各小部件的位置在管廊表皮模型中根据点云数据进行标识以方便后期模型导入。由于一些比较复杂的物件或非常规族建模时采用Revit 效率较低,因此本实验借助3Ds⁃Max 专业建模工具对管线支架、变电箱、管箍等部件进行三维重建。模型建好后将其导出为DWG 格式,然后在Revit中新建一个族文件,通过导入CAD 命令将DWG 文件导入到族中。新导入的DWG 文件只有线性轮廓,需要通过拉伸、旋转、放样等命令将其重新构造为实体模型。其它小部件以相同方式处理,最后做成一个族文件载入到项目中。图10 是交叉互联箱族创建过程,图11 是两类模型融合后的整体效果。
3DsMax 构造的模型不具备BIM 模型要求,缺少必要的工程信息,进行融合后需要根据采集到的现场数据如图片、文字记录等对各部件输入属性信息,图12 为交叉互联箱信息的录入。后期可通过这些录好的属性信息对各小部件进行实时查询及管理维护。
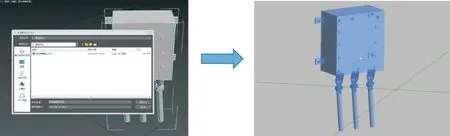
Fig.10 The cross-connected box model is imported into Revit to create a mass family图10 交叉互联箱模型导入Revit 中创建体量族
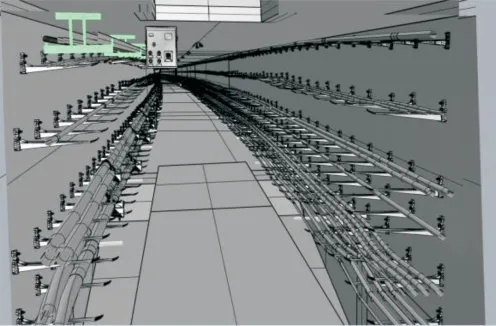
Fig.11 The overall effect of the model图11 模型的整体效果
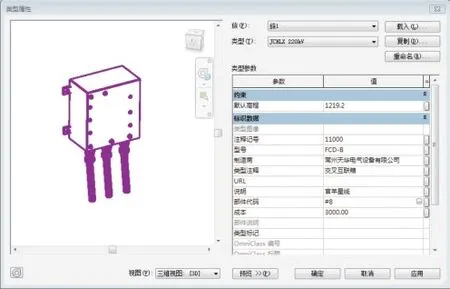
Fig.12 Cross-connect box attribute input图12 交叉互联箱属性录入
3.3 模型精度检验
本文通过对比原始点云的测量距离和模型的测量距离进行精度检验和评价。选取9 段特征线进行验证,见表2。
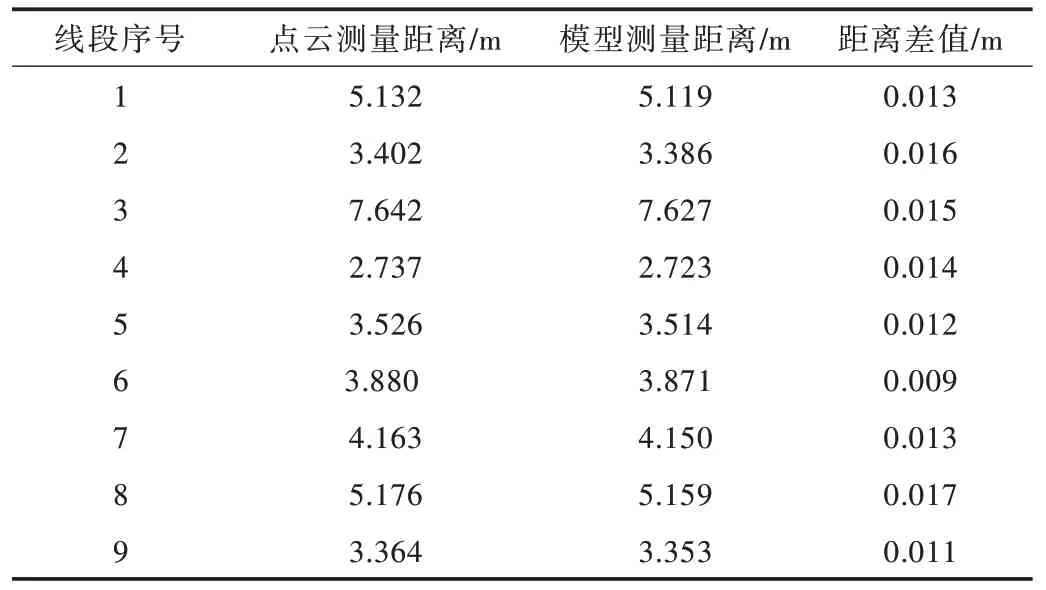
Table 2 Precision inspection table表2 精度检验
从表2 可以看出,相对误差最大值为0.017m,最小值为0.009m,利用中误差公式求其精度。中误差是衡量观测精度的一种数字标准,亦称“标准差”或“均方根差”,它是观测值与真值偏差的平方和与观测次数n 比值的平方根[20]。即,其中Δ 是观测值与真值之差,n为观测值数量。求得m=0.014,显示模型精度较高,因此通过此方法得到的三维模型可以进行实际应用。
4 结语
基于三维激光扫描的建模技术直接根据已经完成的项目进行逆向建模,能大幅提高建模速率和模型精度。将模型融合到Revit 中可以对生成的模型赋予属性信息,使之成为一个可以“生长”的BIM 模型,进而纳入BIM 的多维信息管理中,为今后进行事故处理和工程改造等提供强大的数据支持。但基于海量的三维点云数据构建模型工作量巨大,效率较低,如何从点云数据中快速提取特征要素并快速建立模型是未来需要重点研究和解决的问题。
