基于视觉识别的线控制动压力滑模控制*
2021-02-02邱明明曹龙凯张义雷
邱明明,曹龙凯,黄 康,张义雷,刘 浩
(1.合肥工业大学机械工程学院,合肥 230009;2.汽车技术与装备国家地方联合工程研究中心,合肥 230009)
前言
随着汽车智能化、网联化和自动驾驶技术的不断发展,对车辆安全性提出了更高的要求,制动系统的性能是衡量车辆安全性的重要指标[1],受到汽车行业的广泛重视。线控制动系统作为先进的控制执行器,是制动系统的发展趋势。制动决策和执行器控制是线控制动系统关键技术,影响着制动效果。然而制动决策和执行器控制分别受路面条件和控制器的控制精度影响,是制动系统的技术难题。针对以上两个方面的问题,国内外学者已做了大量研究,并取得了有价值的研究成果。
在制动决策方面,主要分为两大类,一类是采用定滑移率进行制动,并将路面分为高、低附着路面[2],如文献[3]中提出一种改进线性二次型最优控制算法,使车辆在不同路面行驶工况下获得良好的滑移率控制效果;文献[4]中设计了一套电磁-液压复合制动系统,通过滑模控制算法对车轮制动力进行实时控制,提高了响应速度和滑移率的控制精度;文献[5]中提出了一种面向整车电子机械制动系统的滑模控制方法,并通过CarSim 与Simulink 进行制动防抱死联合仿真,验证了该控制方法的有效性和制动性能的优越性。另一类是采用变滑移率进行制动,对路面类型进行辨识,获取当前路面条件下的最佳滑移率,如文献[6]中提出一种基于道路特征值的路面识别方法,设计了6 种典型路面特征值区间,识别精度高,实时性好;文献[7]中在Burckhardt 模型的基础上,提出一种基于类比特性的路面峰值系数辨识算法,准确性好,适用路面范围广;文献[8]中采用带工况参数的径向基(RBF)神经网络来逼近Burckhardt模型中的非线性参数,用混合参数优化方法辨识RBF 网络工况参数,进而辨识路面类型。综上所述,第1 类方法采用定滑移率进行制动,并未考虑路面类型对最佳滑移率的影响,因此制动系统的路面自适应性差;第2 类方法采用变滑移率进行制动,这类方法虽然对路面类型进行了辨识,但大多根据系统的状态参数进行辨识,受状态参数不确定性影响大,影响辨识精度。因此,本文中提出一种基于计算机视觉的方法来直接对路面类型进行识别,获取当前路面的最佳滑移率。
在执行器控制方面,已有很多学者开展了大量研究,主要有PID控制、滑模控制和自适应控制等[9],如文献[10]中以集成式电液制动系统作为研究对象,设计了基于PID 控制的位置—压力串级控制器,提高了I-EHB 系统的制动安全性和舒适性;文献[11]中针对电液制动系统,设计了具有目标压力跟踪和强鲁棒性的滑模控制器来提高系统的制动性能和可靠性;文献[12]中提出了一种针对混合线控制动系统的制动力精确调节PI 控制算法,实现前后车轮制动力的精确调节。
本文中以一种液压调控的线控制动系统为基础进行建模,考虑制动时电机参数和车速误差等不确定性因素,在此基础上提出一种双层结构的制动控制器,上层基于深度学习理论对路面类型进行辨识,进而得到不同路面条件下的最佳滑移率;下层采用滑模控制理论对最佳滑移率进行跟踪控制,以获取当前路面条件下的最佳控制输入,最后通过仿真和硬件在环实验对控制器的控制效果和制动力进行验证。
1 液压调控的线控制动系统建模
1.1 制动器建模
制动系统简图如图1所示。

图1 制动系统简图
系统工作时通过控制电机动作,经丝杠螺母推动活塞杆运动,产生液压制动力,进而实现制动全过程。在制动过程中分为消隙和堵转两个阶段,由于消隙时间很短,故只考虑接触后的电机堵转状态,则电机模型[13]为

式中:u 为PWM 占空比;Ua为电压;La为电枢电感;ia为电枢电流;Ra为电枢电阻;Ke为反电动势系数;ωm为转子角速度;Jm为转子等效转动惯量;ω̇m为转子角加速度;KT为转矩系数;TL为负载转矩。
电机进入堵转状态,ωm=0,ω̇m=0,则转矩和电流的关系为

则作用在制动盘上的力矩为

式中:μr为制动盘表面摩擦因数;r 为制动盘有效半径;Fb为制动力;ηs为丝杠传递效率;ph为丝杆导程;A1为液压主缸截面积;A2为制动缸截面积。
1.2 1/4车辆模型
为简化模型,不考虑制动强度对前后轮胎法向作用力的影响,即4 个车轮的法向受力是相等的。受力分析如图2所示[14]。
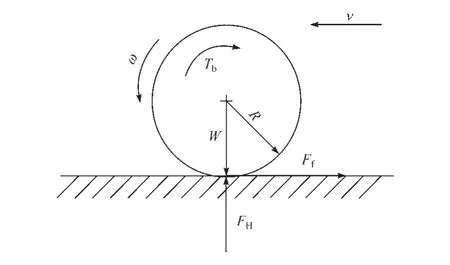
图2 制动时车轮受力分析
1/4车辆动力学方程为

式中:m 为车辆质量;v 为车速;Ff为路面对车轮的摩擦力;μs为轮胎与路面之间的摩擦因数;FH为路面对车轮的反向作用力;g为重力加速度。
车轮动力学方程为

式中:Jc为车轮转动惯量;ω 为车轮角速度;R 为车轮半径。
滑移率是指在车轮运动中滑动成分所占的比例,用λ表示:

1.3 轮胎模型
本文选用Burckhardt 轮胎模型[15],则轮胎纵向附着系数为
式 中c1、c2、c3是 与 路 面 条 件 有 关 的 参 数,取 值见表1。
图3 为滑移率和附着系数的关系图。由图可知,不同路面条件下最佳滑移率并不相同,峰值附着系数也不同,本文中通过计算机视觉确定路面类型后,利用Burckhardt 模型对最佳滑移率进行求解。因为该模型可很好地体现纵向附着系数和滑移率之间的关系,且拟合精度高[16],只要识别了路面类型就可得到该路面下的最佳滑移率:


表1 不同路面下Burckhardt模型参数

图3 滑移率和附着系数关系
1.4 基于深度学习的路面类型识别
针对目前路面类型的辨识算法存在数据计算量大,易受参数不确定性影响等问题,本文结合深度学习在图像处理方面的优势,设计了一种基于深度学习的路面类型识别模型,通过视觉对路面类型进行直接识别,精度高、实时性好。识别模型框架如图4所示。
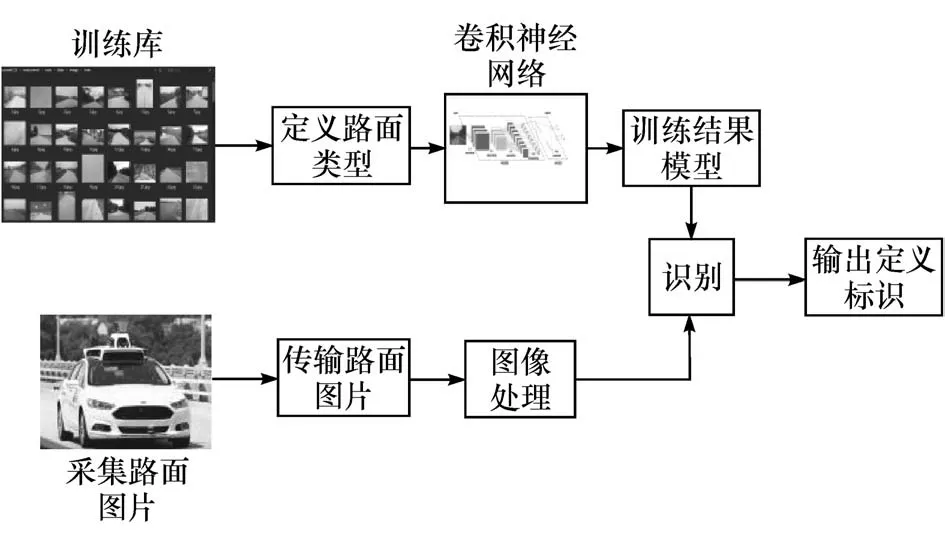
图4 路面识别过程
其中路面类型标识定义如表2所示。
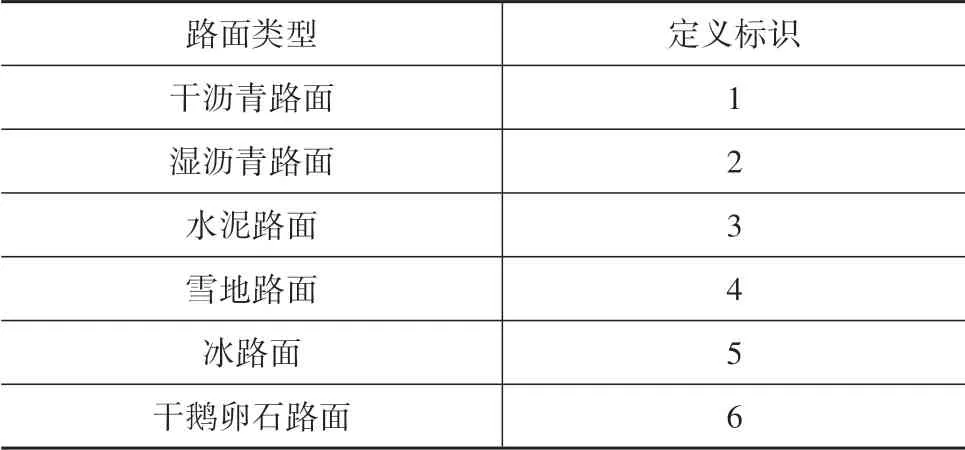
表2 路面类型标识
将MatConvNet 工具箱作为卷积神经网络的实现工具,建立路面识别的卷积神经网络结构,如图5所示。
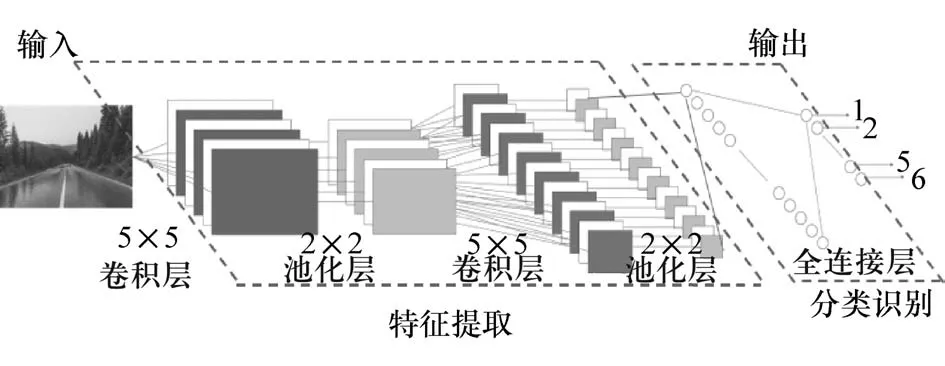
图5 卷积神经网络结构图
卷积神经网络算法的输入为路面图片。
卷积层对路面图片进行特征提取,输出的特征图被传递至池化层进行特征选择和信息过滤。全连接层对提取的特征进行非线性组合以得到输出,完成学习目标。
输出层利用Softmax 回归分类器将路面类型分类结果输出。
路面类型识别的步骤如下:
(1)收集6 种路面类型图片各150 张,共900 张图片,作为深度学习的训练库,然后对路面图片进行编号;
(2)选取6 种路面类型图片各20 张,共120 张图片,作为测试库,用来测试训练精度,这部分图片与训练库中图片不同,同样也须编号;
(3)新建标识定义文本、训练标签文本和测试标签文本,分别用来定义路面类型、将训练库中6 种路面类型图片与定义标识对应和对路面类型图片做编号排序;
(4)在MATLAB 中新建主函数、起始函数、训练函数、预处理函数,其中主函数可以调用其他函数;
(5)在 MATLAB 中 通 过 C++ 编 译 运 行MatConvNet 工具箱,在训练函数中设定训练迭代次数,运行训练主函数,开始训练,当迭代次数达到设定值时,自动结束训练,并生成训练结果模型,迭代次数越多,则训练结果模型的识别精度越高;
(6)运行路面类型测试函数,对训练结果模型的识别精度进行测试;
(7)最后,将训练结果模型放入识别模块用于实时识别路面类型,从而实现深度学习在路面类型识别中的应用。
训练过程如图6所示,其中objective为所有样本的误差,top1err 为模型输出1 个预测结果的错误率,top5err 为模型输出5 个预测结果的错误率,可知随着迭代次数(epoch)增加,误差和错误率在逐渐变小。

图6 训练过程
经测试,模型的识别精度为96.7%,测试结果如图7 所示,图片上方括号内数字为识别后输出的路面类型标识。
2 滑移率跟踪控制器设计
滑模控制(SMC)本质上是一种特殊的非线性控制[17],具有快速响应、对应参数变化和扰动不灵敏、无需系统在线辨识、鲁棒性好等优点,与传统控制方法的区别表现为控制的不连续性。滑移率的跟踪控制受车速和制动系统模型参数等不确定性因素的影响,对控制器的鲁棒性要求较高,结合滑模控制的优点,选用滑模控制理论对滑移率跟踪控制器进行设计。
为使系统状态能快速趋近于滑动模态并削弱抖振的影响,选用指数趋近律[18]。
对λ求导得

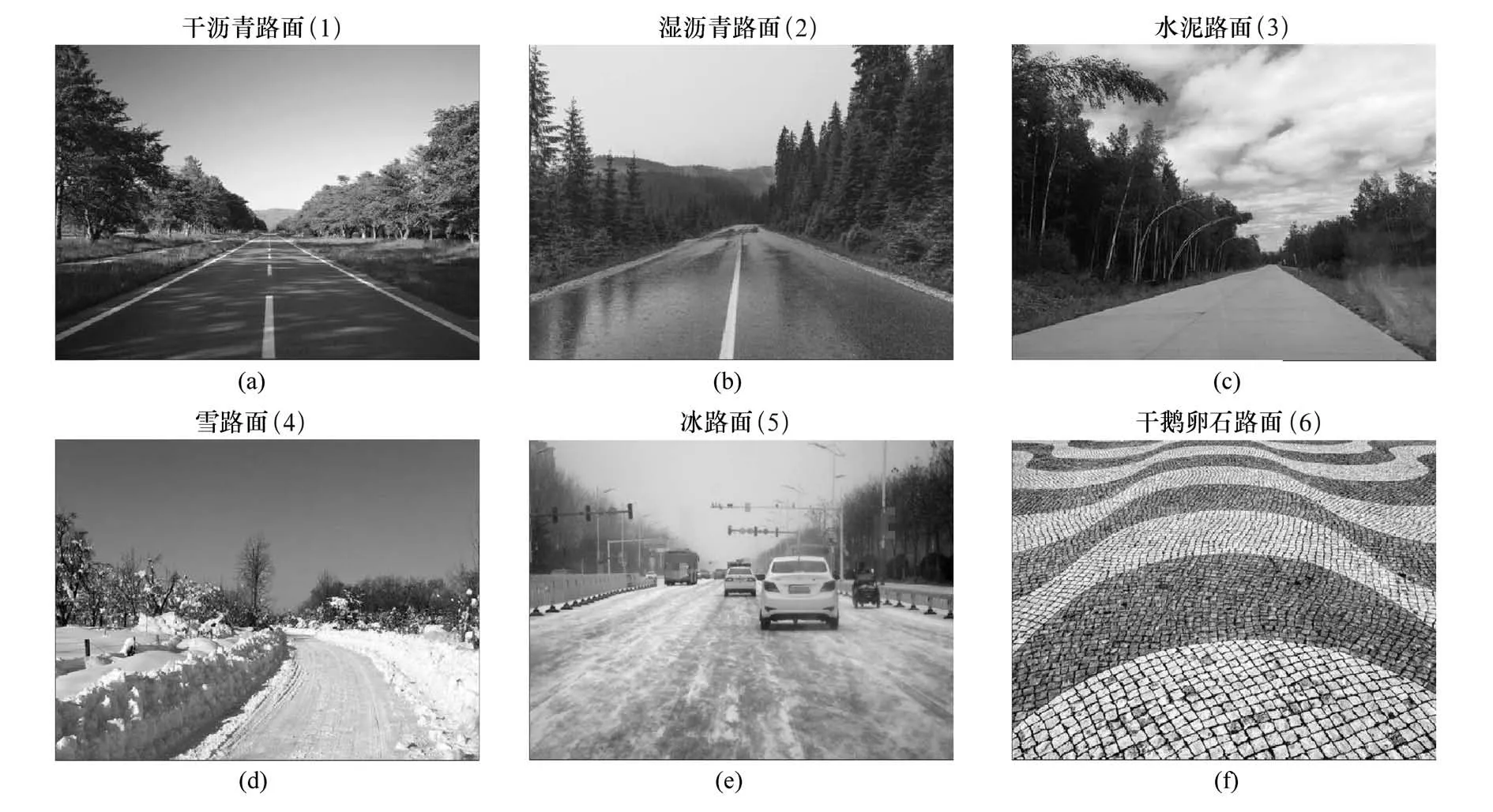
图7 路面识别结果
联立(3)、式(6)、式(8)和式(12)可得:

式中电流ia为控制输入,用u(t)表示。

在制动时,电机处于堵转状态,此时输出的堵转力矩与转子和定子间的位置有关,因此转矩系数KT存在不确定性;另外,车速无法精确获取,故针对以上不确定性引入综合干扰项d(t),则有

设定切换函数

式中:λ*为理想滑移率,且随着路面类型的变化而变化。则
(1) 本文通过单轴拉伸测试得到了0Cr18Ni9不锈钢材料的应力-应变关系,该关系符合Ramberg-Osgood弹塑性本构模型,利用全局优化算法反演得到其弹塑性本构参数:弹性模量和泊松比分别为203GPa和0.3,硬化指数和硬化系数分别为4.2和2.96。

将式(14)代入式(16)得

采用指数趋近律,有

联立式(14)、式(18)得控制律为

由于干扰未知,上述控制律无法实现。为解决此问题,采用干扰的界来设计控制律。则

式中de为与干扰d的界相关的正实数。
将式(20)代入式(17)得

为满足滑模到达条件,选取de值来保证控制系统稳定。假设干扰项有界,则

式中dA和dB分别为干扰的下边界和上边界。
(1)当s(t) > 0时,

(2)当s(t) <0时,


则可得出满足选取原则的de为

定义Lyapunov函数为

为进一步削弱系统的抖振,在控制器中用饱和函数sat(s)代替符号函数sgn(s),即
式中:k=1/Δ;Δ为边界层。
3 仿真分析与实验验证
3.1 仿真分析
为验证该控制方法的可行性,基于Simulink 建立双层结构的制动系统控制器仿真模型,如图8 所示,其中:上层为路面类型识别层,包括视觉识别和最佳滑移率模型;下层为制动执行系统,包括1/4 车辆模型、滑模控制器模型和执行器模型。

图8 双层制动系统模型
在仿真中,首先针对不同路面,进行单路面条件仿真,取该路面条件下的最佳滑移率与定滑移率对比,附着系数取该路面下的峰值附着系数与高、低附着系数对比,再对变路面条件进行仿真,仿真参数如表3 所示。图9~图12 为单路面条件的仿真结果,图13 为变路面条件的仿真结果,其中仿真工况为初速度80 km/h下的紧急制动工况,但雪地路面初速度设为60 km/h(定滑移率λd=0.2;高附着路面条件下μd=0.8,包括干沥青路面、湿沥青路面和水泥路面;低附着路面条件下μd=0.2,包括雪地路面)。

表3 仿真参数

图9 干沥青路面(λd = 0.2,μd = 0.8)

图10 湿沥青路面(λd = 0.2,μd = 0.8)
由图3 可知,雪地路面条件下的峰值附着系数小于0.2,故实际在雪地路面制动时,取低附着系数为0.2 的制动控制策略在制动时间上会变长,制动距离也会增加。
综合以上几种路面仿真可知,取定滑移率λd=0.2,附着系数按高、低附着路面取0.8、0.2,并不适合所有路面条件下的制动,不能达到最优的制动效果,采用最佳滑移率制动效果优于定滑移率,并由图3 可知,滑移率为0.2 对应的并非峰值附着系数,通过视觉对路面条件进行识别,获取最佳滑移率,进而得到峰值附着系数,可使制动减速度最大化,制动效果更好。
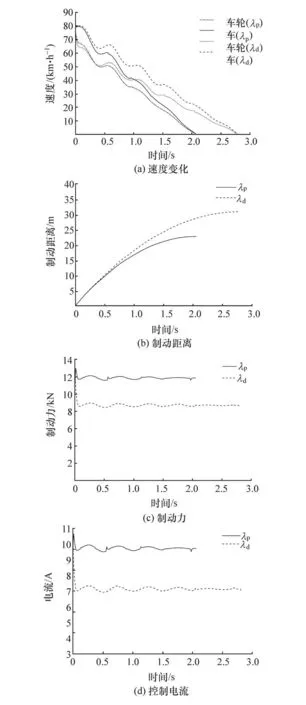
图11 水泥路面(λd = 0.2,μd = 0.8)
3.2 硬件在环实验
为验证该方案的有效性和可行性,搭建了硬件在环试验平台,计算并输出在制动过程中的制动力。
3.2.1 硬件在环实验平台

图12 雪地路面(λd = 0.2,μd = 0.2)
硬件在环实验平台主要包括Simulink 仿真模型、控制平台、硬件实物平台和信号处理模块,如图14所示。
其中仿真模型为在Simulink 中搭建的控制算法模型、EHB 制动执行器模型、车辆模型,运行仿真将模型中的控制量输出;控制平台主要包括上位机、下位机控制板,上位机负责将控制量输入到下位机控制板,控制板与电机驱动器通过RS232 串口实现通信连接,并向驱动器发送PWM 控制信号;硬件实物平台包括控制板、电机驱动器、电机、转矩测试仪、传动机构、液压主缸、制动轮缸、压力传感器、稳压电源等;信号处理模块包括转矩采集模块、压力采集模块;稳压电源负责向实验台供电。

图13 变路面(湿沥青→干沥青→雪路)
3.2.2 结果分析
取干沥青路面下的制动进行实验验证,实验结果如图15 所示。经过硬件在环实验,可以得出实验台满足制动力的要求,该方案可行,并且在制动力稳定后,与需求制动力之间的误差在2%以内。
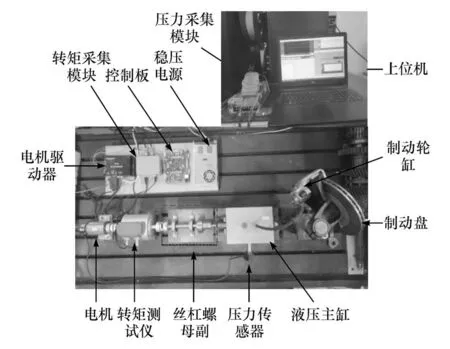
图14 硬件在环实验平台
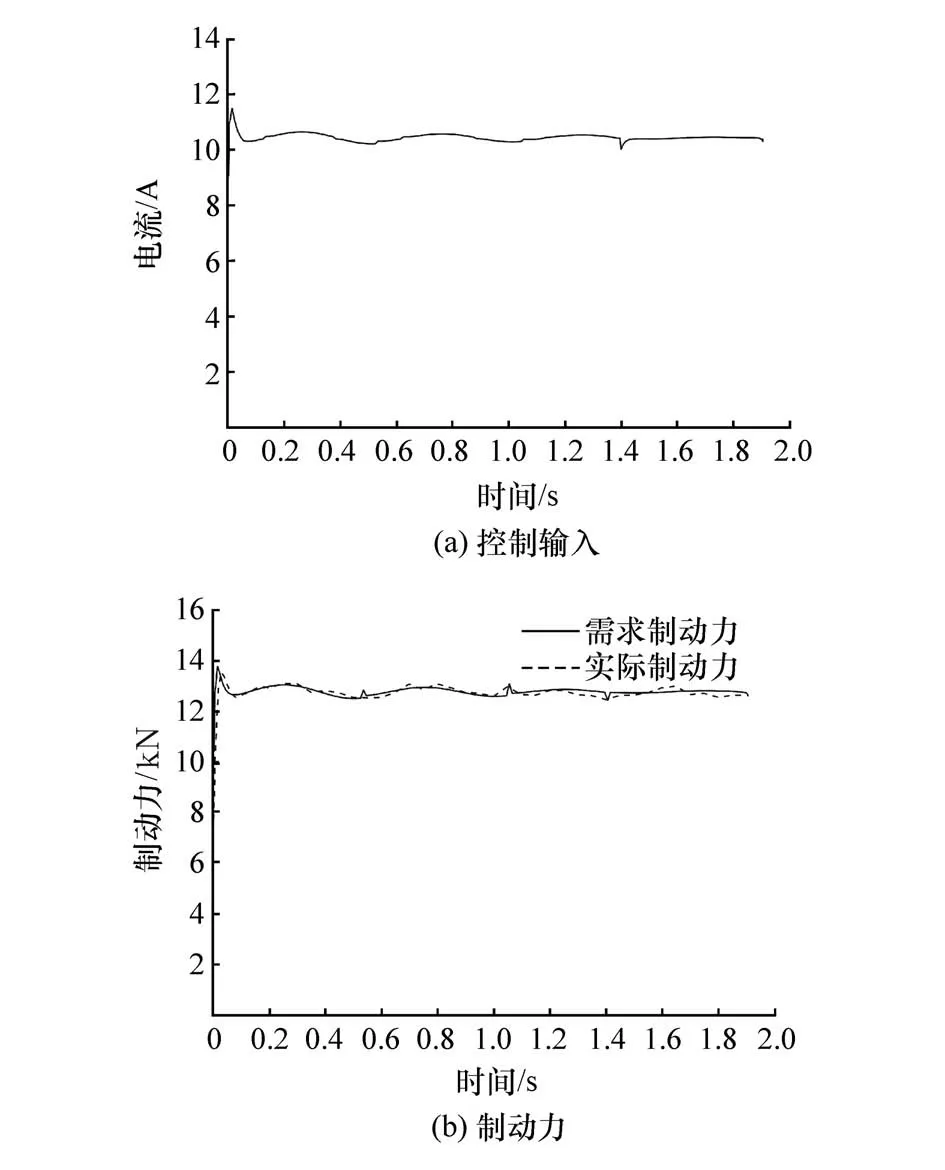
图15 实验结果
4 结论
本文中针对液压调控的线控制动系统,提出一种基于视觉识别的线控制动压力滑模控制方法,在紧急制动工况下,通过计算机视觉识别当前路面类型,在识别精度和实时性上更好,进而获取该路面下的最佳滑移率作为控制对象,采用基于趋近率的滑模鲁棒控制方法对最佳滑移率进行跟踪控制,相较于传统的定滑移率,可获得更好的制动效果。最后,通过硬件在环实验验证了该方案的可行性。
