一种隧道超前探水自动监控系统
2021-01-29朱宏辉
孙 刘,朱宏辉
(武汉理工大学 物流工程学院,武汉430063)
改革开放以来,我国的公路、铁路的隧道建设里程不断增加。但对掌子面前方的地质信息探测不明,导致严重地质灾害,造成人员伤亡的事故时有发生。因此超前地质预报工作成为隧道施工过程中必不可少的一个环节。在隧道工程中典型的物探方法有基于地震波理论的TSP(Tunnel Seismic Prediction)、TGP(Tunnel Geology Prediction)、电磁波地质雷达(GPR)以及电法探测中的瞬变电磁法等。TSP超前预报方法是利用地震反射波原理,人工设置震源点并用炸药激发产生地震波来预报掌子面前方与隧道轴线大角度相交的平直不良地质体(断层、节理),该方法效果较好,但操作过程比较繁琐,数据处理结果的离散型和不确定性较大。TGP 原理与TSP 相同。电磁波地质雷达是根据电磁波被不同介质的反射过程中振动幅度,行走时间以及波形变化等信息的差别来判断目标地质的形态和属性。但地质雷达主要对掌子面前20~30 m 的地质进行探测,探测距离较短, 且抗金属等物质的干扰能力差,并且数据处理比较困难。瞬变电磁法是电法探测的一种,其原理是利用不接地回线或接地源将初级脉冲磁发射到地下,并且在初级磁脉冲长的间歇期间借助线圈或接地电极来观察二级感应涡流场。通过研究其时间与空间的分布规律, 分析其电阻率的不同,来分析地质形态[1]。瞬变电磁法具有分辨率高、探测深度大、信息丰富等优点[2-3]。但电磁瞬变电磁仪的天线长度可以达到5~10 m,目前在使用中主要依靠人工操作并需要两名工人手持线圈对摆动角度进行控制,采集角度不精确,难以达到对不同方位探测的需求,效率低且探测精度不高,同时数据分析周期较长,难以保证实时监测掌子面前方的地质状况。
本文根据隧道施工安全预警要求,并结合自动控制与物联网技术,设计出一种超前探水自动控制系统。该系统通过安卓客户端发出控制指令,通过二维云台实现发射线圈不同位姿的精确控制,分析主机通过USB 获取电磁仪主机采集数据,实现数据分析,在网络环境好的条件下,分析主机可将采集数据传送至远程服务器进行备份。通过安卓APP 将探测分析结果展示在手机上。在实际施工现场对系统进行一系列的测试,验证了系统的稳定性和可运行性。通过安卓客户端作为探测数据的查询终端,可以显示出掌子面前方的水质分布状况,从而有效地提高隧道施工监测效果。
1 系统总体结构及特点
该探水自动检测系统是在隧道安全预警小车需求的基础上提出的。系统要求通过车载检测仪器检测数据,并将数据传输至远程服务端,同时根据测量数据自动分析出测量结果并进行预警。系统总体结构主要由瞬变电磁仪主机、分析主机、杆件1,杆件2,杆件3,推杆1,推杆2,水平舵机,垂直舵机,左侧伸缩杆,右侧伸缩杆,直流电机,正时皮带以及发射线圈组成。由于在隧道施工环境中需要考虑防水需求,故该系统将分析主机和高频瞬变电磁仪主机搭载在小车内部,以提高防水等级。直流电机带动正时皮带以实现伸缩杆伸缩,减小非工作状态所占体积。采用水平和垂直运动舵机对发射线圈进行位姿控制,提高不同方位探测精度。考虑到隧道环境中设备的便携性以及操作的简便性,使用安卓手机通过蓝牙连接运动控制装置以发送控制指令。同时通过安卓手机对数据分析结果进行展示。整体结构如图1 所示。发射线圈伸缩部分放大图如图2 所示。
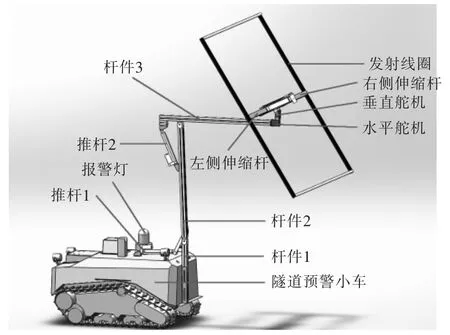
图1 系统整体结构Fig.1 Whole architecture of system

图2 发射线圈伸缩部分放大图Fig.2 Enlarged drawing of telescopic part of transmitting coil
2 系统总体架构
系统总体架构如图3 所示。手机通过蓝牙连接发射线圈位姿控制装置的HC-05 蓝牙模块,发出测量指令,此时STM32 通过串口启动电磁仪主机测量程序,并控制发射线圈水平和垂直运动,使得发射线圈摆动到合适位置。测量结束后,分析主机通过USB 读取测量完成后的数据,并通过因特网将数据发送至服务器端保存并备份。同时分析主机启动自动分析程序,对探测数据进行结果分析。分析完成后,安卓手机通过路由器可访问分析主机中的Tomcat 服务器,通过无线局域网络将探测结果显示到手机上。

图3 系统总体架构图Fig.3 Overall architecture of system
3 发射线圈位姿控制装置
发射线圈位姿控制装置的硬件系统框图如图4所示。系统控制芯片采用STM32F407,通过+5 V 电源对系统进行供电, 系统通过GPIO 控制推杆和直流电机的运动,通过RS485 串口给高频瞬变电磁仪发出探测指令并控制水平和垂直舵机的运动,通过无线蓝牙模块接收安卓手机客户端发送的控制指令并返回线圈位姿状态。
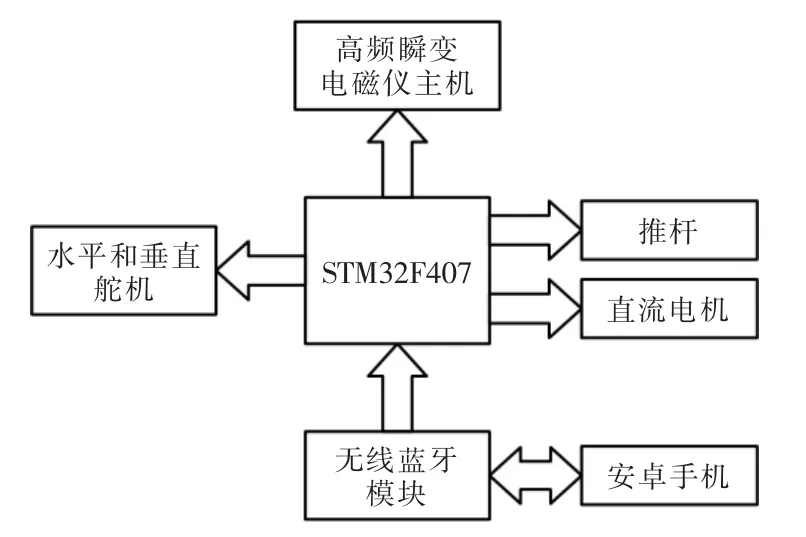
图4 硬件系统框图Fig.4 Blocks of system
3.1 RS485 串口控制模块
RS485 串口主要是对水平和垂直运动舵机进行控制。水平和垂直运动舵机选择型号为智能佳XM540-W270-T-R,运行电压为12 V,最小控制角度为0.088°。采用位置控制模式,其控制方式为RS485异步串口通信。选择STM32 开发板上的串口2 连接水平舵机,水平舵机与垂直舵机之间采用JST-4P 连接线进行连接, 水平舵机ID 为0x01, 垂直舵机ID为0x02。选择波特率为9600,无校验位[4]。舵机接收数据格式如图5 所示,其中A 为报头,B 为保留位,C 为舵机ID,D 为指令包的长度,E 为发出的命令,F为舵机转动参数,G 为CRC16 校验位。

图5 舵机接收数据格式Fig.5 Receiving data format of actuator
3.2 推杆控制模块
推杆控制模块主要通过STM32 的GPIO 引脚控制推杆运动。推杆的直推推力为3500 N,供电电源为直流24 V。选择PA10,PA11,PC10,PC11 引脚和GND 连接直流电机正反转模块,DC POWER 端连接24 V 电源,LOAD SIDE 端连接推杆,通过PA10(PC10)引脚或PA11(PC11)引脚置高电平来对推杆进行伸缩控制。电动推杆接线图如图6 所示。

图6 电动推杆连接图Fig.6 Connection diagram of electric push rod
3.3 直流电机控制模块
直流电机主要作用是将超频瞬变电磁仪的探测天线伸出和收回,以减小在非运行状态时所占的空间大小。选择PE5 和PE6 和GND 引脚连接直流电机正反转模块,DC POWER 端连接1 V 电源,LOAD SIDE 端连接直流电动机。由于直流伸缩杆件具有行程限制,故通过行程开关对直流电机运动进行限制。当天线伸缩杆运行到指定位置时,行程开关断开,触发下降沿中断,直流电机停止运动。
3.4 蓝牙模块
无线蓝牙模块主要作用是接收手机客户端发送的控制指令,实现远程遥控的功能。本设计采用HC-05 蓝牙模块作为无线通信器件。该模块可以兼容5 V 或3.3 V 单片机系统,操作简单,功率低,且通信距离能够达到10 m。该模块一共有34 个引脚,工作时一共有6 个引脚被接通。表1 为各引脚接线说明。通过Android 智能手机上基于Java 语言的程序发送AT 指令, 实现对蓝牙模块工作模式及工作参数设置[5]。使用时将HC-05 蓝牙模块设置为主机模式,并将波特率设置为9600,1 位停止位,无校验位。图7 为HC-05 的电路图。
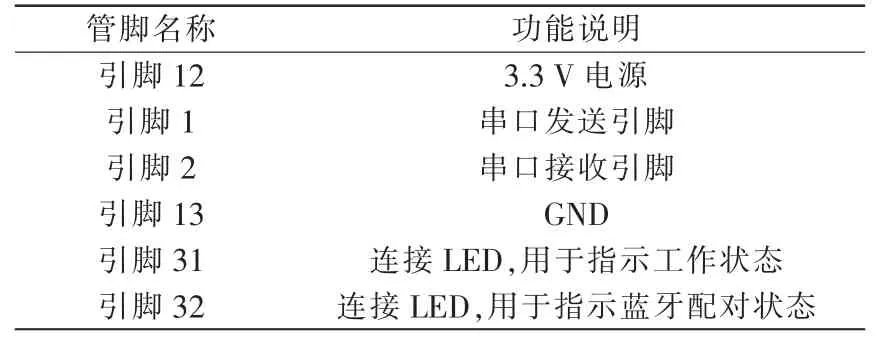
表1 蓝牙引脚接线说明Tab.1 Bluetooth pin function description

图7 HC-05 的电路图Fig.7 Circuit diagram of HC-05
4 安卓APP 控制模块
安卓APP 主要作用是完成用户身份认证、控制线圈运动、监视线圈运动装置的运行状态,以及获取探测数据的分析结果。当客户端程序启动后,开始进行身份验证,如验证成功,则模块进入蓝牙连接界面,通过查找蓝牙设备与选定蓝牙设备进行配对。用户点击菜单栏中的已绑定按钮查看已配对的蓝牙设备,选择HC-05 蓝牙模块进行连接,之后手机APP 将ListView 控件隐藏, 显示运动操作界面,通过点击开始运动按钮,发射线圈便可按指定角度进行运动,手机界面实时显示运动位置。探测完成后,可通过点击显示结果按钮,将探测结果显示在手机上。
4.1 用户身份验证
用户身份认证主要通过两个EditText 和一个Button 控件实现。当用户点击Button 时,获取Edit-Text 的身份以及密码信息,并进行验证。当验证通过时,证明该用户是设备操作人员,同时切换到蓝牙通讯界面。
4.2 手机蓝牙通通讯
用户通过身份验证后, 打开新的Activity。在OnCreate()函数中初始化UI 界面,并且获取蓝牙状态,如蓝牙打开直接进入界面,蓝牙未打开提示程序要打开蓝牙,用户可以选择允许或拒绝。如选择拒绝则程序结束,如选择允许,程序继续运行,同时程序将注册BluetoothAdapter.ACTION_DIS COVERY_STARTED、BluetoothAdapter.ACTION_DISCOVERY_FINISHED、BluetoothDevice.ACTION_FOUND、BluetoothAdapter.ACTION_SCAN_MODE_CHANGED、BluetoothDevice.ACTION_BOND_STATE_CHANGED 广播接收者。通过OnCreateOptionMenu()方法创建手机客户端的菜单栏,重写onOptionsItemSelected()方法设计菜单栏功能程序。当用户点击菜单栏中的“查找设备”选项时,将调用start-Discovery()方法搜索蓝牙设备,当查找到设备时安卓系统将回调BlueToothDevice.ACTION_FOUND 广播接收事件并将蓝牙设备添加到List<BluetoothDevice>列表中,同时通过ListView 显示蓝牙设备名称以及MAC 地址。重写ListView 中的OnItemClick()方法,用户可通过单击LIstView 中的item 选择蓝牙设备进行配对。蓝牙搜索结果界面如图8 所示。

图8 蓝牙搜索结果Fig.8 Result of bluetooth discovery
点击菜单中“已绑定”查看已绑定蓝牙设备,重写ListView 中OnItemClick()方法,用户通过单击已绑定的蓝牙设备ListView 中的Item 选择设备进行连接, 同时调用蓝牙连接程序Java 程序ChatController.getInstance().startChatWith()函数启动该Java程序连接线程ConnectThread(),该连接线程继承自Thread。在ConnectThread()中通过应用远程蓝牙设备device 类的createRfcommSocketToServiceRecord(UUID)方法获取HC-05 蓝牙模块的Bluetooth-Socket 的对象,并应用connect()方法与HC-05 蓝牙模块建立连接,蓝牙设备的通信连接流程如图5 所示。当通信服务器端建立连接后将会返回一个连接上的Bluetoothsocket 蓝牙套接字,此时监听程序关闭,蓝牙服务器端和客户端应用此套接字进行数据通信[6]。连接成功后,会隐藏ListView 控件同时显示出运控制界面。当点击运动控制按钮时,通过蓝牙通信Java 程序中继承自Thread 的ConnectedThread()线程管理手机与蓝牙模块之间的数据通信,应用Bluetoothsocket 的write()方法向HC-05 蓝牙模块发送数据,同时应用read()方法一直监听蓝牙串口数据输入流,并将数据显示在运动控制界面上,实现运行状态监测效果。蓝牙通讯连接流程如图9 所示。
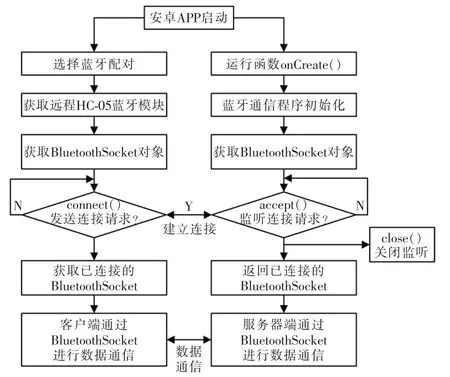
图9 蓝牙通讯连接流程Fig.9 Flow chart of bluetooth communication connection
4.3 显示探测结果界面
探测结果显示主要显示分析主机应用探测自动分析程序分析出的图片结果。主要由不同探测角度的视电阻率断面扇形图以及5 张三维效果图组成。在分析主机端搭建Tomcat 服务器,在安卓客户端通过Glide 图片加载库对图片进行Http 请求,获得图片并显示在ImageView 上。
5 系统验证与测试
系统软硬件模块设计完成后,需要对系统机械结构、 硬件运行稳定性和手机APP 功能进行测试。硬件测试主要测试发射线圈运动控制装置能否正常运行,手机APP 测试主要包括手机蓝牙与HC-05模块的通信以及探测结果显示功能。打开手机APP,并开启蓝牙连接,点击开始运行按钮,此时天线运动,并将运动状态发送到手机上。如图10 为桐梓隧道测试现场。图11 为手机客户端实时显示界面。

图10 桐梓隧道测试现场Fig.10 Test site if Tongzi tunnel
图11 安卓手机实时显示界面Fig.11 Real-time display interface of Android mobile
当程序运行完成后,推杆和天线收回。此时可以通过点击菜单下的显示结果按钮, 显示探测结果。探测部分结果如图12 所示。
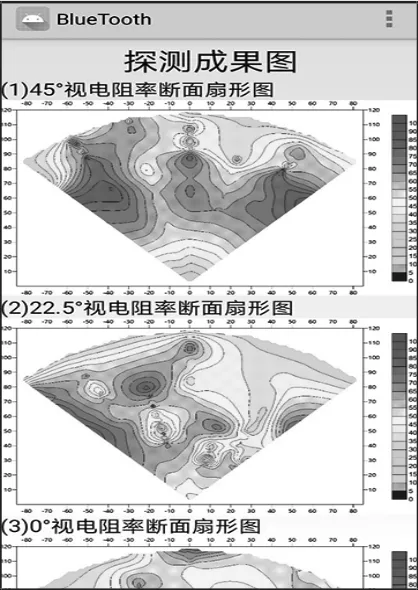
图12 探测结果图Fig.12 Result of detection
6 结语
本文将物联网技术和安卓系统相结合,通过分析隧道预警小车的具体需求,设计出一种超前探水自动调节系统,通过对软硬件模块的设计,实现了隧道环境中探水数据的自动采集以及传输,并通过分析主机分析探测数据,得出探测结果,工程技术人员可通过安卓手机查看探测结果,并进行相应判断。从而能够减少隧道施工过程中工人数量,有效地提高隧道监测预警能力,避免发生意外事故。
