基于蚁群算法的多移动机器人避障路径规划方法
2021-01-29丁艳,毕杨
丁 艳,毕 杨
(1.汉中职业技术学院 机电工程系,汉中723000;2.西安航空学院 电子工程学院,西安710077)
随着工业机器人的发展,机器人的种类越来越广泛,应用范围也越来越广[1]。在机器人的智能控制设计中,相关的多移动机器人避障和路径规划方法研究受到人们的极大关注[2]。
传统对多移动机器人避障路径规划方法主要有粒子群寻优法、误差反馈校正法、末端位置参数调节法等[3-4]。文献[5]提出未知环境下机器人避障及动态目标追踪。在引力公式中加入速度差和加速度差,提高了机器人动态目标追踪的灵活性和对环境的适应能力,但其耗时较长。文献[6]提出基于混合策略的移动机器人避障算法探究,运用矢量场直方图法结合神经网络算法实现基础避障,但该方法需要大量样本训练集,自适应能力不强。
故在此提出基于蚁群算法的多移动机器人避障路径规划方法。该方法结合小扰动解析方法进行多移动机器人避障网格区域化匹配,建立寻优约束参数, 通过自适应蒙特卡洛定位法对路径定位,采用蚁群算法寻优控制。通过仿真测试,验证其在提高多移动机器人避障路径规划能力方面的优越性能。
1 多移动机器人避障规划运动学模型及参数寻优
1.1 多移动机器人避障规划的运动学模型
为实行多移动机器人避障规划的运动学规划设计, 构建了多移动机器人避障规划控制流程,如图1 所示。

图1 多移动机器人避障规划控制流程Fig.1 Control flow chart of obstacle avoidance planning for multiple mobile robots
在图1 控制流程的基础上,结合小扰动解析方法,进行多移动机器人路径规划的运动学模型构建[5]。首先,进行多移动机器人避障规划的姿态信息融合,结合误差反馈跟踪调节的方法,得到多移动机器人避障路径规划的传递函数为

其中
式中:w(k)为多移动机器人绕体坐标系各轴的惯性协方差矩阵;若w(k)∈L2(0,∞),A,B,C,D 为多移动机器人质心分布矩阵参数;n 为控制约束的自变量维数,为正整数;ΔA1,ΔB1为多移动机器人避障稳态误差增益。
引入多移动机器人的误差扰动项,结合姿态陀螺仪、加速度计对多移动机器人路径和姿态采样结果,构建多移动机器人避障规划的控制器。其表达为

以步态运动力学和阻尼参量为自镇定性调节参数,进行线性规划设计和自适应处理,得到参数融合和信息处理函数[6]。其表达为

式中:i 为多移动机器人的模糊度参数;u(x)为多移动机器人路径空间的测量矩阵;z(x)为多移动机器人路径分布空间的末端位姿阵列矩阵;n 为适当矩阵维数。
结合参数融合和信息处理结果,构建多移动机器人的运动学模型,其表达为

式中:m 为多移动机器人路径规划的约束状态参数变量。
通过上述分析,得到多移动机器人的运动学模型结果,采用地图寻优方法进行多移动机器人避障过程中的网格区域化匹配,结合SLAM(simultaneous localization and mapping)算法,进行多移动机器人避障参数寻优[7]。
1.2 多移动机器人避障参数寻优
通过构建多移动机器人的运动学模型,进行机器人避障过程中的网格区域化匹配,得到多移动机器人的步态参数跟踪模型[8]。其表达为

式中:(A+B)为运动学方程的自变量分布矩阵;F,G分别为多个蚁群滤波寻优参数和系数;t 为时间。
基于运动学特征分析方法进行多移动机器人避障过程中的路径分布特征变量分析,建立多移动机器人避障路径分布的寻优约束参数, 采用扩展SLAM 算法进行多移动机器人质心加速控制[9],结合参数融合,得到避障路径分布的寻优约束参数模型。其表达为

式中:Ф1,Ф2为多种机器人的位置标定。
基于运动学特征分析方法进行多移动机器人避障过程中的路径分布特征变量分析,通过局部定位,构造多移动机器人步进跟踪稳态参数学习模型。其表达为

式中:ea为多移动机器人路径规划的状态特征分布量化参数,且为正整数;q 为跟踪修正系数。
分析可知,多移动机器人的路径规划参数模型分为确定和不确定性两部分,采用时延估计进行误差修正[10],得到采样特征分布项L2。在多移动机器人质心规划空间内,引入多移动机器人路径的反演规划方法,得到多移动机器人路径的稳态控制参数变量为

式中:P,R 为多移动机器人路径分布的实对称矩阵;θi为位姿系数;α 为反演规划参数。
根据多移动机器人测量参数,结合系统的空间增益梯度, 得到多移动机器人避障参数寻优模型。其描述为

式中:lj(k)为多移动机器人路径规划的目标状态;li(k)为多移动机器人路径规划的参数信息融合矩阵;i,j 为机器人的位姿信息;Γ(k)为多移动机器人路径寻优参数。
通过分析,实现了多移动机器人避障参数寻优,以多移动机器人的质心参数为约束对象,得到多移动机器人路径空间规划模型, 结合避障参数寻优,进行避障路径规划[11]。
2 多移动机器人避障路径优化
2.1 多移动机器人避障路径定位优化
通过局部定位和全局跟踪识别方法进行多移动机器人避障路径规划的障碍物定位优化设计。采用快速扩展随机树RRT(rapidly-exploring random tree)运动规划模型,结合自适应蒙特卡洛定位的方法[13],进行多移动机器人避障路径过程中障碍物定位优化。其描述为

其中


式中:θ 为多移动机器人避障目标位形矢量倾角;α 为机器人避障路径空间分布纵轴(x 轴)与水平面(Oxy 平面)之间的夹角;f(x),f(t)分别为机器人避障路径分布的横向、纵向偏移量;Mz为空间坐标系Oxy 上的投影角;z 轴垂直于多移动机器人避障分布状态空间坐标系Oxy;m 为移动机器人的质量。
综上分析,通过自适应蒙特卡洛定位的方法,进行多移动机器人避障路径规划过程中的障碍位置准确定位[14]。
2.2 多移动机器人避障蚁群寻优算法
在实现障碍物精准定位的基础上,采用蚁群寻优算法进行多移动机器人路径空间规划,假设蚁群的个数为N,得到多移动机器人避障路径规划的网格数为m,每个蚂蚁的信息熵浓度指标函数为

式中:eq为第q 个蚁群寻优算子的最佳路径空间匹配样本集;ekq为蚁群寻优的模板参数。
通过多移动机器人避障控制,其中最佳路径空间匹配样本集的第k 个步态跟踪融合状态分量为τk,由于时延参数是确定的,满足τk=τx+τy+τz,其中τx,τy,τz分别为步态在x,y,z 轴上的分量。采用反演控制,得到多移动机器人避障的蚁群寻优修正向量为

根据非线性参考模板匹配方法,利用蚁群寻优控制的参量量化分布雅可比矩阵,得到蚁群寻优的自适应迭代步长分布算子为

式中:∂为机器人的阻尼系数。在多移动机器人避障姿态校正过程中,受到小扰动力矩因素的影响[12],得到多移动机器人避障路径的蚁群寻优路径为

式中:α 为机器人避障路径夹角。根据多移动机器人步进跟踪的稳态扰动与加速度测量矩阵的关联性,得到多移动机器人避障蚁群寻优算法方程式。即

其中

式中:x(0)为多移动机器人避障的初始状态均值;P0为其方差。当多移动机器人在避障过程中处于非加速运动状态时,通过实现多移动机器人避障的蚁群寻优算法,实现路径规划优化设计[15]。
3 仿真测试分析
为验证所提方法的有效性,进行了仿真试验。设定机器人路径规划的动态补偿系数为0.34,对机器人路径参数采样的传感器节点数设定为200,姿态参数的测量误差分别设定为0.67 mm,0.89 mm 和1.26 mm。多移动机器人路径分布的初始位置状态为

饱和非线性状态参数控制特征量为λ1=1.21,λ2=1.34,c1=2.11,c2=2.25;大幅度的振动强度为Q(k)=0.45。
多移动机器人避障路径规划的蚁群寻优参数设定如下:
连杆的动能Kk=0.0508 N·m;
势能Kp=0.5732 N·m;
闭环系统的平衡渐变参数为

稳态增益控制矩阵为
控制矢量参数Jp=0.804(1±0.5)kg·m2。
根据上述仿真环境和参数设定,进行多移动机器人避障路径规划仿真,得到多移动机器人避障路径规划的寻优参数,寻优效果如图2 所示。

图2 多移动机器人避障路径规划参数寻优效果Fig.2 Optimization effect of obstacle avoidance path planning parameters for multiple mobile robots
由图可见,随着采样次数多增加,参数寻优效果逐渐上升,且一直保持在0.7 以上。这主要是因为所提方法对多移动机器人的路径分布特征变量进行分析,结合系统的空间增益梯度,得到多移动机器人避障参数寻优模型,提升了参数寻优效果。
根据图2 的参数解析结果,进行了避障路径规划,得到优化的规划路径如图3 所示。
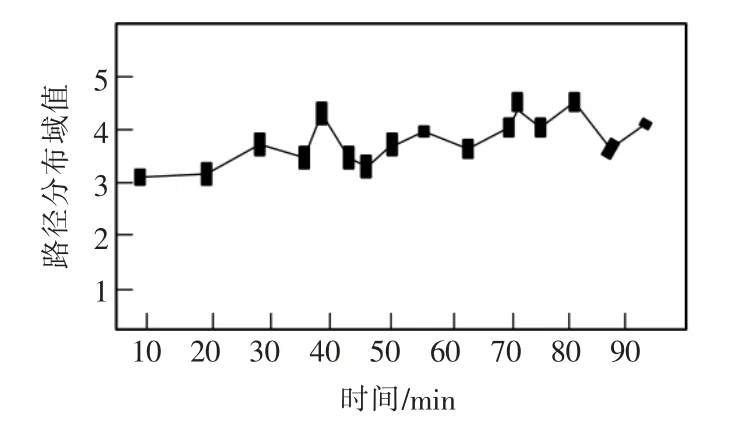
图3 多移动机器人避障路径规划结果Fig.3 Obstacle avoidance path planning results of multiple mobile robots
分析图3 可见,本文方法能够有效地实现多移动机器人避障路径规划, 路径分布阈值稳定在3~5之间,变化幅度较小,相邻单位时间内最大路径分布阈值差仅为1.2,路径寻优能力较好。这主要是因为在实现参数寻优的基础上,采用了蚁群寻优算法进行多移动机器人路径空间规划,实现了避障路径最优化。
为测试路径规划的误差,分别采用文献[4]和文献[5]所提方法进行对比,得到的结果如图4 所示。

图4 多移动机器人避障定位误差对比Fig.4 Error comparison of obstacle avoidance and positioning for multiple mobile robots
分析图4 可见,本文方法进行多移动机器人避障路径规划的误差较低, 且随着迭代次数的增加,定位误差率基本稳定。对比其他方法,本文方法的机器人路径规划定位精度较高,能够有效提高多移动机器人避障能力。这主要是因为所提方法采用局部定位和全局跟踪识别方法对障碍物进行定位,提高了定位精度,降低误差。
4 结语
本文提出基于蚁群算法的多移动机器人避障路径规划方法。结合小扰动解析方法,构建多移动机器人避障规划运动学模型;采用扩展滤波方法进行多移动机器人的步态参数跟踪;通过自适应蒙特卡洛定位的方法,进行多移动机器人避障路径障碍物精准定位;采用蚁群寻优算法得到蚁群寻优控制的参量量化分布矩阵,进行多移动机器人路径空间规划。分析得知,本文方法进行多移动机器人避障的路径规划能力较好,避障定位误差较低。对于多移动机器人避障路径规划具有一定参考价值。
