煤矿井下目标定位的研究现状与展望
2021-01-25叶伟
叶 伟
(1.安徽理工大学空间信息与测绘工程学院,安徽 淮南 232001;2.深部煤矿采动响应与灾害防控国家重点实验室,安徽 淮南 232001)
煤炭资源在我国的能源供应方面仍处于主导地位[1]。煤矿开采涉及到的人员安全问题和设备正常运行与控制问题一直备受关注。我国煤矿井下地质条件非常复杂(多断层、采深变化范围大),矿井巷道总长达几十千米,巷道纵横交错且多弯曲,分布十分复杂,工作环境恶劣(粉尘大、潮湿、淋水),井下作业地点分散,井下人员和设备流动性大。地面管理人员监督/查询井下人员位置以及井下工作人员实时确定自身位置都是十分困难的,尤其井下光线黯淡,大量粉煤灰对指向标志牌的遮挡也给井下人员分辨路线方向造成极大困扰。此外,为了对井下各种流动机器(主要是运煤机车、采煤机)和设备进行准确控制和管理,需要建立能够实时对井下人员和运煤机车、采煤机进行位置搜索、进行路径分析、进行导航的井下定位系统,以实现煤矿井下安全生产以及高效调配生产资源和管理生产。根据《国家能源技术创新行动计划(2016—2030年)》可知,在未来数十年中,我国大部分煤矿仍难以达到完全无人化开采[2],因此井下人员精确定位研究仍是一项重要任务。国家安全生产监督管理总局提出的机械化换人、自动化减人科技强安专项行动,将煤炭智能化开采列为重点研究方向和研发任务[2]。煤矿智能化开采是在当前采用的机械化、自动化采煤机制中加入人工智能元素,并加以融合、革新和完善。煤矿智能化开采是煤炭开采方式转型的有效手段,而研发高精度、低成本、环境适应性强的井下定位技术是实现煤矿智能化走向成熟阶段和实现普遍无人化开采的关键环节[3]。在煤矿智能化开采研究中,井下各种自动化机器都需要进行精确的定位和导航,以保证地面工作人员可以对井下无人化开采进行精准控制和管理。应对井下特殊环境的人员和运输、采煤机器定位需求,近年来出现了许多井下定位导航技术。相继出现或还处于研究当中的井下定位导航技术,多数是依赖于基站和参考站之间的无线信号传输、信号接收、信号记录和处理、信号反馈,并结合基站、参考站内部定位算法解算出参考站的位置并将定位信息传送到地面控制平台和井下各参考站。对井下目标定位中涉及的基站和参考站进行如下定义:基站,是基于无线信号物理特性进行设计的定位系统的主要组成部分,一般固定在两侧巷道壁上,与地面监测控制系统通过无线信号相连,负责向参考站或目标节点发送无线信号并接收参考站或目标节点的反馈信号,进而根据内部系统、程序解算出参考站和目标节点的准确位置。基站与参考站之间周期性地通过无线信号传输交互信息,获取参考站的位置信息并将其发布到地面控制平台和参考站。实现地面工作人员实时掌握井下目标的位置,也让井下工作人员及时明确自己的位置。参考站,也可称为目标节点,因目前的井下目标定位主要是针对人员和运煤机车、采煤机等,对于人员所使用的参考站相对应于基站的移动端,用于接收基站发出的信号,根据参考站接收到信号时信号的物理状态和参考站所捕获到的物理信息等对参考站内部系统进行不同的设计,从而对接收到的信号特征、时间到达节点等进行记录并根据内部设计反馈不同的信号给基站,由此衍生出不同的定位方法。
1 井下人员定位的研究现状
诸多学者结合WiFi、ZigBee、无线传感网(wireless sensor networks,WSN)以及射频信号(radio frequency identification,RFID)[4-9]等无线通信原理研究出一系列井下人员定位技术和系统,并在国内一些矿井得到应用。基于WiFi技术的井下人员定位系统复杂度较高,功耗高,建设成本高[6];基于ZigBee技术的井下人员定位系统相比基于WiFi技术的复杂度低,功耗小,成本低,但传输距离短,无法满足井下巷道长距离和纵横交错的需求,而且可传输数据量小,不适用于井下所需采集较大数据量的声音、图像等数据信息,即使结合这两种技术会在精度和传输距离上有所提升,但仍会增加系统复杂度和建设成本[6];基于WSN的井下目标定位技术,若要增加目标区域的信号覆盖面,必须增加节点数,相应会增加系统复杂度,且定位精度较低[7];基于RFID技术的井下人员定位系统更多的是用于人员身份识别、反映位置分布情况,实为一种考勤定位系统,并非真正的动态跟踪定位系统[8-9]。此外,基于WiFi、ZigBee、RFID的井下人员定位系统无法对井下人员进行动态定位[10],抗多径效应能力差,无法在断电断网的情况下进行定位。UWB定位技术是目前井下定位中的主流定位技术之一,并衍生出许多融合版或改进版UWB井下定位技术[11]。判定一种井下定位系统或技术的好坏主要通过相关指标进行评价[12],见表1。
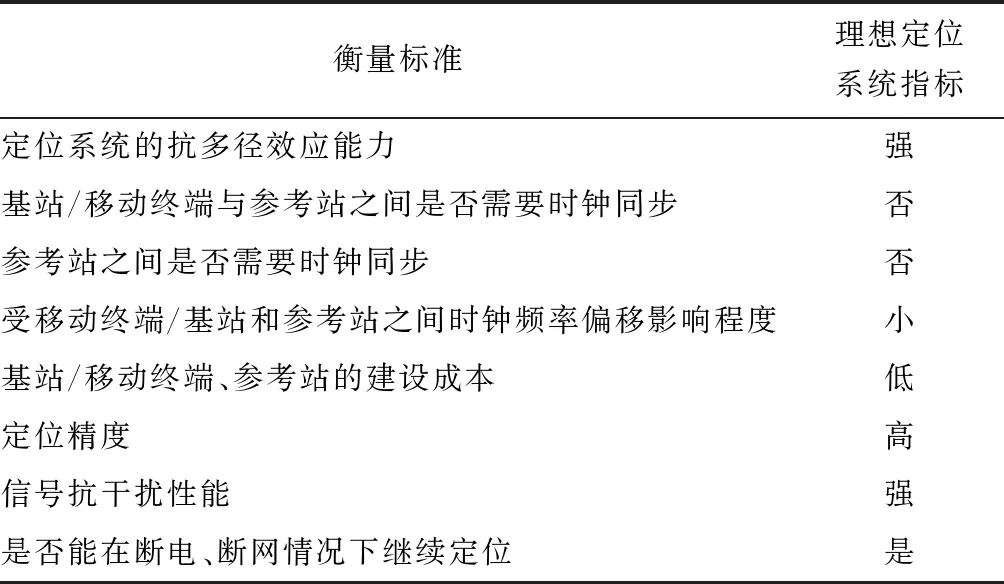
表1 井下定位系统性能好坏的判定标准Table 1 Criteria for the performance of positioningsystems in underground roadway
1.1 iBeacon井下定位技术
iBeacon技术是2013年苹果公司提出的新型室内定位技术[4-5]。信标和移动终端共同构成基于iBeacon的井下定位系统,并采用蓝牙4.0通信协议进行信标和移动终端之间的信号传输,这里的移动终端具有类似于基站的功能,信标具有类似于参考站或目标节点的功能。
iBeacon井下定位系统使用蓝牙信标体积小且用钮扣电池供电,可确保在断电情况下继续定位,减小了施工难度;相比传统定位技术,定位精度有很大提升,可以确保定位误差在1.5~2.5 m范围内,更好地满足井下定位的需求。实时定位的同时可以给井下人员移动终端推送地面预警广播信息,方便井下人员在遇到事故时选择最佳逃生路线。iBeacon井下定位系统目前使用蓝牙4.0通信技术,通信传输采用AES-128加密技术,能耗更低,数据传输安全性也大大提升[4-5]。 相比WiFi通信技术,iBeacon技术传输周期占空比小,使得信标之间的相互干扰更小[4]。 iBeacon技术的信号传输距离可达到100 m[5],但移动终端接收到的信号强度会随着移动终端与信标之间的距离而变化,距离超过传输距离则无法接收到信号,在极限传输距离内相距越远,信号强度越弱,因此需要加大信标的布设密度,一定程度上会增加建设成本。井下巷道弯曲、机车行进、潮湿、高温等复杂的环境对蓝牙信号传输是一种较大的挑战。
iBeacon信标布设具有区域独立性,虽然信标成本低,可以在井下复杂区域进行高密度布设,但移动终端的建设成本较高,目前只在国内重要矿井或像井下爆破库、水泵房、掘进巷道等矿井中一些重点监测区域进行布设。
iBeacon技术井下定位中的成功应用案例:文献[4]中给出国内某矿-320平面信标布设情况图,可知该矿井的iBeacon定位系统的应用范围仅限于某些重要井巷区域。文献[13]公布了2017年韩国首尔某矿率先使用RECO Beacons信标进行井下目标定位,这种定位系统达到了包括联邦通信委员会(FCC)、韩国认证(KC)、欧洲合格认证(CE)和技术法规合格认证(TELEC)等电气和通信机构的安全认证,并且这种信标能很好适应地下矿井的潮湿、多粉煤灰的恶劣环境。
1.2 UWB井下动态定位技术
核心原理为测距或测向的UWB定位技术按照在距离或角度测量中所用特征参数的不同,分为UWB信号强度(received signal strength,RSS)定位法、AOA UWB定位法、TOA UWB定位法和TDOA UWB定位法。
UWB传输信号在井下弯道多的巷道中传播时会产生多路径效应。此外,巷道壁凹凸不平且有支护、照明等障碍物遮挡以及巷道内多水潮湿等环境因素也会造成信号在传播过程中产生多路径效应[10]。因此,信号在井下巷道内传播会因多路径效应产生一定的衰减[11]。
UWB信道环境较为复杂,多径分量分布广,信号在传输过程中不可避免路径损耗的影响。要增强信号到达定位目标的强度,单独使用RSS方法达到效果较小且RSS方法无法发挥UWB超带宽的优势,还需要在信号传输中考虑建立多路径环境下能量收集模型和信道环境下的信号衰弱补偿模型[11]。
基于AOA的UWB定位方法在实现上相对简单。基于AOA的定位技术在信号传播中需要保持通视条件良好,而井下巷道分布复杂、纵横交错,且弯道多,因此而产生的多路径效应信号衰减和通视条件差会大大降低AOA定位的精度[11]。可以考虑将AOA定位技术与其他定位技术/方法进行组合定位,并将AOA定位技术获取的位置信息作为参考,再用其他定位技术/方法获取的信息进行修正从而在减少参考站数、减小成本前提下提高定位精度。
基于TOA可实现对目标节点(井下人员)的定位;TOA方法是利用信号传播时间延迟进行测距[14],确定目标节点与信号输出端的距离进而确定人员位置。由于要求参考站与基站时钟严格同步,这对于深井作业的井下人员来说,接收端时钟易受到地磁场的干扰,导致时钟的偏差,所以存在一个同步误差,对定位精度影响较大。而在现实中实现参考站与基站之间的绝对同步较为困难,即使实现也会因设备复杂度提高增加建设成本。
TDOA定位方法通过对信号到达目标节点(井下人员)的时间延迟进行作差进而实现对目标节点的定位[15];TDOA定位的系统相对简化且更容易实现,它不需要基站与接收端保持时钟同步,只需要参考站间保持时钟同步[11,15-16]。TDOA定位技术会对信号到达时间进行作差,会在一定程度上提高定位精度。但是由于TDOA定位信号是双向传播,加大了功率消耗,间接增加了使用成本。
卡尔曼滤波技术具有良好的跟踪性能[16-17],将其应用到无线定位技术领域,能够有效达到动态跟踪定位的效果。有研究者针对卡尔曼滤波无法单独解决非线性问题的局限性,提出一种适用于处理非线性问题的改进型卡尔曼滤波算法。
1.3 异步测时井下定位技术
异步测时定位技术是为了克服现有井下人员定位技术的定位误差大的问题而提出的[12]。异步测时是在考虑到煤矿井下巷道狭长,宽度和高度远小于长度,将巷道看成是一维状态下设计的,将煤矿井下人员定位简化成一维定位[12]。
异步测时井下定位精度仅取决于参考站收发信号。信号强度、信号发射功率、信号接收灵敏度、信号多路径效应衰减以及巷道环境造成的信号衰减都不会影响异步测时的定位精度。异步测时定位无需考虑基站、参考站之间的时间同步问题,大大降低了基站、参考站的建设难度和成本。相比于TWR、SDS-TWR定位技术,异步测时定位法克服时钟频率偏移的能力要高很多。异步测时定位法需要在井下相距一定距离时安装对应的参考站以保证相邻参考站可以相互通信,但是井下巷道纵横交错,复杂且多弯道,要确保信号的正常传播和参考站的正常收发信号需要缩短相邻参考站的间隔,而井下巷道长达数十千米,这将增加参考站的建设成本。
1.4 视频矿灯井下定位技术
视频矿灯定位技术是以无线网络为基础,添加包含图像、声音等多媒体元素,进而升级为多媒体无线传感器网络(wireless multimedia sensor networks,WMSNs)[18-25]。利用矿灯亮度与井下暗淡环境形成强烈反差,从而可以将矿灯照明作为井下人员的多媒体图像特征辨识物。在多媒体无线传感器网络中植入背景差分法图像识别程序,进而结合单(多)摄像机视频定位方法对井下人员进行定位[21]。在WMSNs多媒体监测中,定位分为多摄像机视频协作定位[21-22]和单摄像机视频非协作定位[23-25]。
视频矿灯定位技术添加了多媒体元素的无线传感器网络,具有多种多媒体感知功能、无线传输更加快捷方便、多种拓扑结构相互变换简单等特点。煤矿井下巷道分布情况大致可分为狭长带状分布的简单巷道和纵横交错且多转角的复杂巷道两种情况;在煤矿井下弱光、多粉尘环境中,无论肉眼还是机器都很难分辨井下人员和巷道背景,容易混为一体。在带状简单巷道中可采用单摄像机视频非协作定位方法,在复杂巷道中可采用多摄像机视频协作定位方法。据可靠资料显示,目前WMSNs视频矿灯井下人员定位误差可限制在半米以内。显然,WMSNs定位技术的定位精度较高。但是建设成本也很高,尤其是对于复杂巷道的井下人员定位。因此这种定位方法只能在一些重要矿井或规模较大的矿井中推广实现。此外,该方法需在电力、网络正常情况下才能正常定位。
1.5 TWR井下定位技术
为了克服TOA定位中基站与参考站间需时钟同步的局限性,有学者在TOA基础上提出TWR定位方法。 TWR定位方法是通过参考站与参考站之间的双向信号传输实现测距并进行定位[26-27]。与TOA相似的是,信号发送功率、信号感知灵敏度以及信号传输衰减等对TWR的定位精度没有影响。TWR定位方法无需基站与参考站之间时钟同步,降低了基站和参考站的复杂度和建设成本,但基站和参考站的时钟频率偏移会对定位精度产生一定影响[26-27]。
SDS-TWR定位方法是在TWR测距过程的基础上,再主动与基站进行一次双向信号传输过程实现测距[28]。SDS-TWR定位方法不需要基站和参考站之间时间同步,相比TWR定位方法降低了基站和参考站间的时钟频率偏移,基站的复杂度和建设成本降低,定位精度相对提高,适用于煤矿井下人员的定位[28-30]。
1.6 多传感器信息融合井下定位技术
多传感器信息融合井下人员定位是利用IMU模块—综合了三轴加速度计、三轴陀螺仪、磁力计以及气压计等组件采集数据并进行预处理[31-35]。利用该模块获取的井下人员相对地面的深度,在三维定位中扣除该深度数据则简化成X方向、Y方向的二维定位[33]。在二维面内利用改进步行者航位推算算法获取井下人员的基本移动轨迹[36]。最后,利用随机森林(random forest,RF)分类算法和巷道空间分布先验知识对电磁干扰和位置解算累积误差进行修正[35]。
加速度计和陀螺仪在复杂的煤矿井下特殊地理环境中很容易受到电磁干扰。为了提高井下特殊位置的人员定位精度,袁亚洲等[30]提出使用RF分类算法结合设置阈值的方法对人员的活动进行准确分类,并将分类后的人员动作与井下巷道空间分布先验知识相结合来修正井下特殊位置的定位误差[30,32-36]。利用地图先验知识与人员动作识别的位置估算方法能够有效利用巷道的空间分布先验知识,得到井下人员的绝对位置。利用地图先验知识和人员动作识别实际上是一种机器学习和应用的过程,在机器学习中,RF算法实际上是一种拥有多个决策树的分类器[36],相比于其他算法它具有能够解决过拟合问题、训练速度快且模型泛化性能强的优势。多传感器信息融合井下人员定位能够有效减小误差累积,通过主题模型算法对传感器特征集进行降维[37],并作为后续机器学习中RF算法的输入集。再利用巷道的空间分布先验知识对井下人员的特殊点位置误差进行修正,可以提高并增强定位系统的定位精度及鲁棒性[36-39]。
相比于目前基于无线信号的井下定位方法,多信息融合定位方法定位精度有较大提升。通过RF分类算法识别特殊点进行位置修正只是根据井下先验知识进行机器学习,而井下环境复杂且多变,定位可能还不够准确,可将无线定位方法作为辅助定位。尚待研究开发出一种节能型自适应无线辅助定位方法,可以实现网络节点实时睡眠和唤醒。
1.7 RFID与地磁组合井下定位技术
地磁定位技术发明于20世纪60年代,长期以来主要应用在军事导航定位方面。近几年,国内外相关学者就地磁定位技术在民用方面的应用进行了一系列基础研究[38-45]。汪金花等[44-45]构建了基于地磁导航定位的井下避险系统。关于井下地磁定位的研究,汪金花等[38]进行了基于RFID井下定位的地磁匹配研究并进行了仿真实验,并提出将标签识别与地磁匹配组合的井下定位方法(geomagnetic and RFID combined positioning method,GRPM)。
GRPM井下定位技术是RFID标签识别与地磁匹配组合型定位技术[39]。这是目前现有的井下定位技术中较为前沿的定位技术,不仅可以提供日常的井下人员的定位和管理,还可以实现在断电和断网的情况下井下自主定位和导航,尤其是在井下出现事故时的应急救援中发挥关键的井下人员搜索定位和逃生导航作用。井下人员通过GRPM技术设计的定位设备可以单独、自主定位,还可利用设备的可视化功能查询路线和自身在巷道中的位置。井下复杂环境对地磁的影响较为明显,地磁在巷道内的分布呈现出间断性连续的状况。GRPM方法是一种具有较高地程序/系统兼容性的定位系统,可以与现有的其他井下定位技术集成[37]。井下人员携带GRPM定位移动设备在巷道中行进时,可实时记录走过的精确路径信息[38-39]。GRPM系统与其他井下定位技术/系统进行组合使用进行数据互补和信息共享需要保证井下网络通信良好以及需要经过系统控制中心进行数据转换[37]。但是,GRPM井下定位技术目前处于初级研究阶段,定位精度方面还有很大提升空间。地磁噪声大小、地磁空间分布适配性、装置的地磁传感器灵敏程度、匹配适应性强弱等诸多因素对GRPM的实际定位精度都会产生影响[37-39]。汪金花等[37-38]对地磁匹配算法进行优化并进行匹配试验,得出平均误差平方和算法、海明距离算法、归一化积相关(normalizated product correlation,NPROD)算法匹配定位精度很高,都能达到井下定位的需求,其中NPROD计算速度和匹配精度都要高于其他算法。对于GRPM井下人员定位技术,需进一步对井下地磁基准的建立、地磁匹配模型的修正、结合巷道空间分布先验知识以及结合WebGIS对巷道地物和人员分布特征进行查询开展试验研究[45-47]。
1.8 基于改进UWB算法的井下定位技术
UWB定位系统发射的信号是具有强穿透性、高时间分辨率以及抗干扰性能强的纳秒级秒脉冲信号[48]。UWB定位首先测量目标节点到定位基站的距离进行目标节点的基础定位,对信道多余观测信息进行相关处理进行位置修正提高定位精度。UWB定位方程是一个非线性方程组[49]。对于非线性方程的求解通常采用最小二乘法[50-51]、Chan算法[52]、Taylor展开算法进行求解[53-54]。最小二乘算法和Chan算法求解非线性方程得到的都不是最优解且随着巷道环境变化也会产生影响[50-52]。谢芝玉等[48]提出基于Taylor展开的UWB井下定位算法,提高了UWB定位方法的精确度,提高了环境适应性。
2 捷联惯性导航定位技术
井下运煤机车、采煤机定位技术主要有红外光定位、无线传感定位、超声波定位以及基于捷联惯性导航的定位[55-59]。定位精度较高的要数基于捷联惯性导航的采煤机定位技术。
捷联惯性导航系统中采用的惯性器会发生滑移,定位误差会随时间加速累积。而井下的机车、采煤机等需长时间工作,采用捷联惯性导航定位进行井下运输机车、采煤机定位,其定位精度会与工作时间成反比。国内大多数煤层都存在一定的倾角,需要对井下工作的采煤机进行三维定位。文献[55]提出的捷联惯导/轴编码器组合的井下采煤机定位方法是利用捷联惯性导航定位技术测量运煤机车、采煤机的工作姿态并生成运煤机车、采煤机坐标变换方向余弦矩阵,轴编码器获取机器的位移增量矩阵,并利用余弦矩阵和位移增量矩阵进行一系列坐标转换实现将采煤机在采煤机坐标系下的位置变换到地心坐标系下的位置,进而实现采煤机的三维定位。基于捷联惯性导航/轴编码器组合的采煤机定位方法可以有效抑制采煤机纯惯性定位误差随时间累积的趋势,提高了采煤机惯性导航定位的精度[52]。 但是捷联惯性导航系统与轴编码器结合大大增加了成本。
3 井下定位技术的研究展望
目前关于井下定位的研究大多集中在井下人员定位方面,在井下智能采煤机、智能机器人定位导航方面的研究相对较少。
1) 克服iBeacon定位技术移动终端的信号强度会随着终端与信标间的距离变化而变化的难题不仅可以提高定位精度,还可以减少信标的布设数量,节约成本;基于蓝牙4.0的iBeacon信标发射的信号强度会受到固体障碍物、环境湿度和温度的影响,井下(尤其深井)巷道弯曲、机车行进、潮湿、高温等复杂的环境对信号传输是一种较大的挑战。
2) 基于UWB技术(包括相关改进算法和与其他技术结合的定位系统)的井下目标定位系统适用于井下人员、机车、采煤机等缓慢行进、连续动态的定位需求。但UWB信号在井下封闭环境中易受到巷道多弯道特性和液压支架,巷道壁等的遮挡,形成非视距状态下的定位,而巷道壁组成成分复杂,一方面造成UWB信号无法穿透某些介质而无法进行定位,另一方面UWB信号进行多次反射传递给信标易造成时间接收误差降低定位精度,且解决非视距定位的模型十分复杂,这也是目前亟待解决的问题。因此在井下目标定位中,使用UWB技术,需要增设基站数,尤其在弯曲巷道处,宜采用多基站UWB定位系统。UWB定位系统在井下基站与信标之间的传播时间对基站、信标之间的时钟同步性要求较高,而井下的时钟易受到地磁场的影响造成不同步,从而对定位精度产生较大影响。结合SDS-TWR算法可利用定位标签和定位基站之间二次通信弥补时钟偏移导致的误差。
3) 基于UWB技术的TDOA定位方法虽然只有参考站之间需要时钟同步,仍会增加参考站的复杂度和建设成本,将其与扩展卡尔曼滤波结合,使得其具有动态定位的功能,但对于非线性观测方程的线性近似仍会给定位精度带来一定影响,可以考虑加入Taylor展开方法对非线性观测方程进行求解,提高动态定位的精度。
4) 考虑异步测时定位法的优势以及地磁匹配定位方法具有兼容性且适用于灾后断电断网情况下的井下定位,如何将异步测时法与GRPM地磁匹配定位方法结合是一种新的井下定位展望。
5) 井下地磁测量时噪声干扰较大,地磁异常场空间分布不明显、缓变或特征相似情况下的地磁匹配定位精度低对新的地磁匹配定位算法有着新的挑战。
4 结 语
煤矿安全生产和智能化发展的需求推动了煤矿井下定位的产生和发展。自井下定位技术出现以来,不同学者提出的基于WiFi、ZigBee、WSN以及RFID等通信技术形成了一系列井下人员定位技术或系统,但由于定位精度低,信号传输在井下复杂环境中易受到限制,成本高而未广泛推广使用。近年来,诸多学者相继提出了iBeacon定位算法、RSS UWB井下人员定位技术、AOA UWB井下人员定位技术、TOA UWB井下人员定位技术、TDOA UWB井下人员定位技术、基于改进卡尔曼滤波的TDOA UWB井下人员定位技术、WMSNs视频矿灯定位技术、TWR和SDS-TWR定位方法、异步测时煤矿井下人员定位、多传感器信息融合煤矿井下人员定位、GRPM煤矿井下人员定位技术、基于捷联惯性导航/轴编码器的井下采煤机定位、基于改进UWB算法的井下机器(采煤机、机车等)定位,这些定位方法在与井下复杂环境实现完美契合上都或多或少存在一些局限性。研究井下UWB定位、地磁定位算法与其他定位算法的结合、更高精度的地磁匹配算法以及引进改进卡尔曼滤波算法结合高精度定位算法,实现可以克服井下巷道复杂环境影响、无需时钟同步、低成本、高精度定位,为井下动目标跟踪、胶轮车监控等应用需求提供高精度、大容量的实时位置服务是未来井下人员、机器精确定位的目标,也是使煤矿智能化从初级阶段迈向成熟阶段的关键步骤。