基于近浅海系泊系统的研究与设计
2021-01-23李宁胡霞
李宁 胡霞

【摘 要】 从某一系泊系统传输节点入手,使用经典力学理论对系统内部各个环节的进行受力分析,确定受力环节各个参数间相互关系,同时利用悬链线理论建立方程,解得锚链的受力、形状。运用Matlab程序,通过各参数变量间数据进行迭代计算得到满足条件的解的情况。在上述基础上引入风力、水流力和水深等相关变量,运用多目标规划理论,分析并得到不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域,确定系泊系统的最优设计方案。
【关键词】 悬链线理论;受力分析;迭代分析法;多目标规划;matlab拟合曲线
Research and Design of Mooring System Based on Near Shallow Sea
Li Ning,Hu Xia
(Anhui University of Science and Technology,Huainan Anhui 232001,China)
[Absrtact] Starting from the transmission node of a mooring system, the classical mechanics theory is used to analyze the stress of each link in the system, and the relationship between the parameters of the stress link is determined. At the same time, the catenary theory is used to establish the equation to solve the stress and shape of the anchor chain. Using matlab program, through the iterative analysis and calculation of the data among the parameter variables, the solution meeting the conditions is obtained. On the basis of the above, the wind force, flow force, water depth and other related variables are introduced, and the multi-objective programming theory is used to analyze and obtain the inclination angle of steel barrel and steel pipe, the shape of anchor chain, the draft depth and swimming area of buoy under different conditions, so as to determine the optimal design scheme of mooring system.
[Key word] catenary theory; force analysis; Iterative analysis method; Multi objective programming; Matlab fitting curve
〔中图分类号〕 U653.2 〔文献标识码〕 A 〔文章编号〕 1674 - 3229(2021)03- 0000 - 00
0 引言
系泊系统作为近浅海观测网的重要组成部分,在海洋船舶业的生产生活方面发挥着重要作用,系泊系统通常由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。现对某系泊系统某一传输节点其进行深入研究,通过数学建模的方法,完成以下三个问题。
问题1 已知选用II型锚链22.05m,重物球质量1200kg。现将其放在水深18m、海床平坦、海水密度为1.025×103kg/m3的海域。在海水静止下,计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题2 在问题1的假设下,在钢桶倾斜角度不超过5°,锚链在锚点与海床的夹角不超过16°,重物球质量自调节。计算海面风速为36m/s时钢桶和各节钢管倾斜角度、锚链形状和浮标游动区域。
问题3 在潮汐等因素的影响,布放水深介于16-20m之间。海水速度最大可达到1.5m/s、风速最大可达到36m/s。在考虑风力、水流力和水深情况下,分析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
1 模型假设
为方便对系泊系统设计的研究,在模型建立过程中,可做如下假设:
(1)不考虑海平面高度、水下温度等对浮力的影响;
(2)不考虑锚链与锚链、锚链与钢管之间的弹性伸长作用;
(3)假設系统内部如钢管、钢桶、锚链、锚、重物球等质量分布均匀;
(4)假设海面上的风速方向是水平且恒定的,不同风速下浮标的近海风荷载为恒定值;
(5)假设系统所处区域海水密度均匀,海面没有波浪,并且当地的重力加速度恒为9.8 m/s2;
2 符号说明
本模型所用的各主要变量符号及意义见表1
3 模型建立
3.1 问题一模型建立与分析
对系泊系统整体以及内部各个对象进行受力分析,设定未知参数变量,利用其在水平与垂直方向上受力平衡列出表达式,得出参数表达式[T1]和[θ1]的值,然后对与浮标连接的钢管受力分析,同理列出水平、垂直方向上平衡表达式,得到[θ2]的表达式,依次计算第二根、第三根、第四根钢管的倾斜角,并归纳出[θi+1]的表达式,然后同理对钢桶进行受力分析。对于锚链,综合使用悬链线、力学理论,对取悬链线部分长度为[Δl]的微元进行受力分析,并根据微分方程求解得到悬链长度的计算表达式,最后对锚进行受力分析,将所有上述的表达式联立,利用Matlab进行多次迭代计算,求出分别在12m/s、24m/s风速下,钢桶和各节钢管的倾斜角度、锚链形状、浮标吃水深度和游动区域的半径。
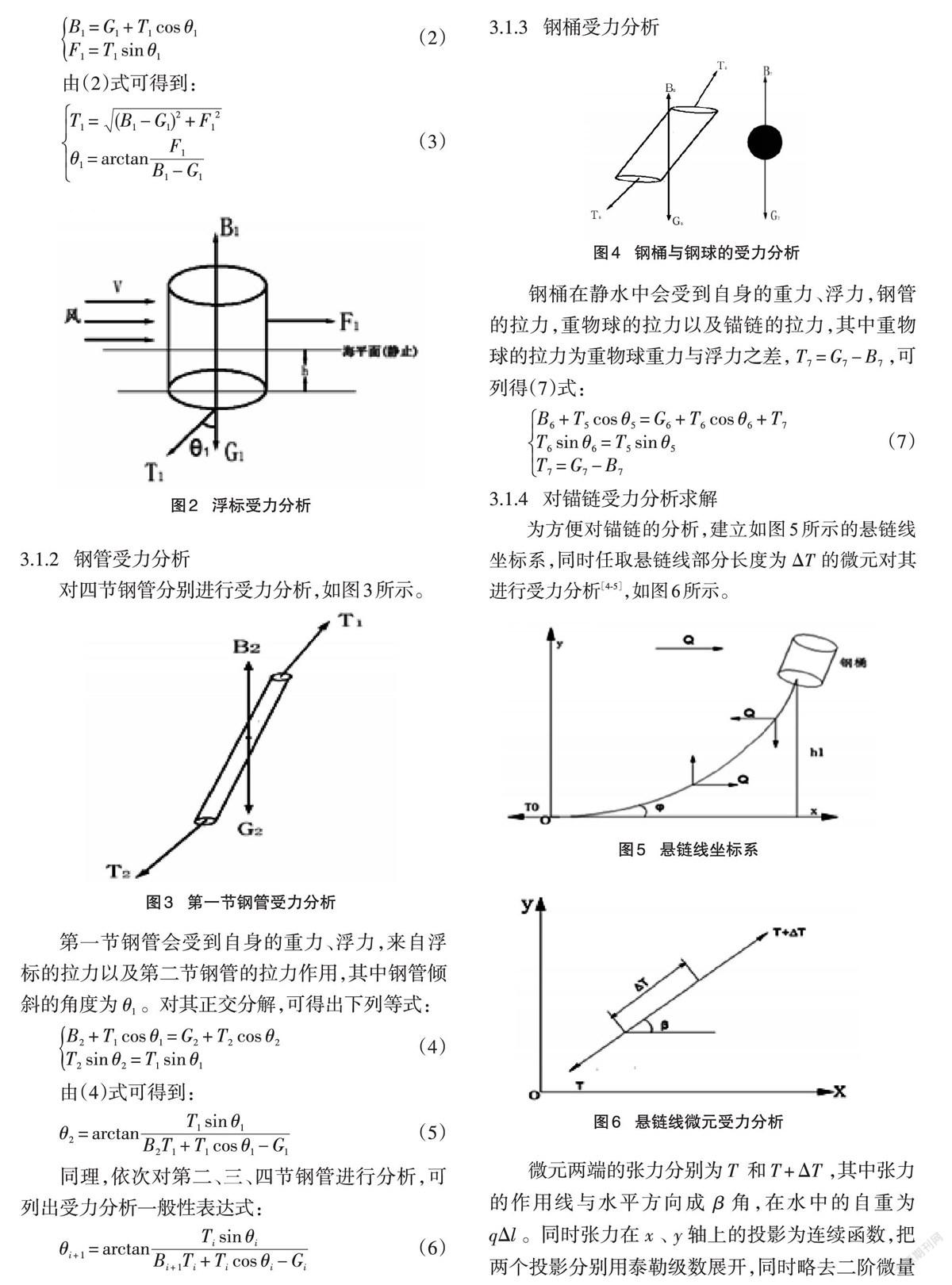
3.1.1 对浮标受力分析
问题一中要求根据部分已知的数据,计算海面风速为12m/s和24m/s时钢管和各节钢管的倾斜角度、锚链形状、浮标的吃水深度以及浮标的游动区域。首先,对系泊系统从整体到内部各个环节进行受力分析,使得其在水平方向上和在垂直方向上受力平衡,即
[∑Fx=0∑Fy=0] (1)
对于浮标进行受力分析[1],如图所示:
浮标处于平衡状态时,会受到来自水的浮力[B1],钢管的拉力[T1],自身的重力以及风力的作用[2],其中风力与浮标水上部分横截面积有关,[F1]=0.625[×sv2],[S=πr2?h],由牛顿第二定律可列出下面表达式:
[B1=G1+T1cosθ1F1=T1sinθ1] (2)
由(2)式可得到:
[T1=(B1-G1)2+F12θ1=arctanF1B1-G1] (3)
3.1.2 对钢管受力分析
对四节钢管分别进行受力分析,如图3所示。
第一节钢管会受到自身的重力,浮力,来自浮标的拉力以及第二节钢管的拉力作用,其中钢管倾斜的角度为[θ1]。对其正交分解,可得出下列等式:
[B2+T1cosθ1=G2+T2cosθ2T2sinθ2=T1sinθ1] (4)
由(4)式可得到:
[θ2=arctanT1sinθ1B2T1+T1cosθ1-G1] (5)
同理,依次对第二、三、四节钢管进行分析,可列出受力分析一般性表达式如下:
[θi+1=arctanTisinθiBi+1Ti+Ticosθi-Gi] (6)
3.1.3 对钢桶受力分析
钢桶在静水中会受到自身的重力,浮力,钢管的拉力,重物球的拉力[T7]以及锚链的拉力,其中重物球的拉力为重物球重力与浮力之差,[T7=G7-B7],可列得(7)式:
[B6+T5cosθ5=G6+T6cosθ6+T7T6sinθ6=T5sinθ5T7=G7-B7] (7)
3.1.4 对锚链受力分析求解
任取悬链线部分长度为的微元对其进行受力[3-4],如图所示。
微元两端的张力分别为[T]和[T+ΔT],其中张力的作用线与水平方向成[β]角,在水中的自重为[qΔl]。同时张力在[x]、[y]轴上的投影为连续函数,把两个投影分别用泰勒级数展开,同时略去二阶微量后,可得微分方程[5][y″=1a1+y′2] (8)
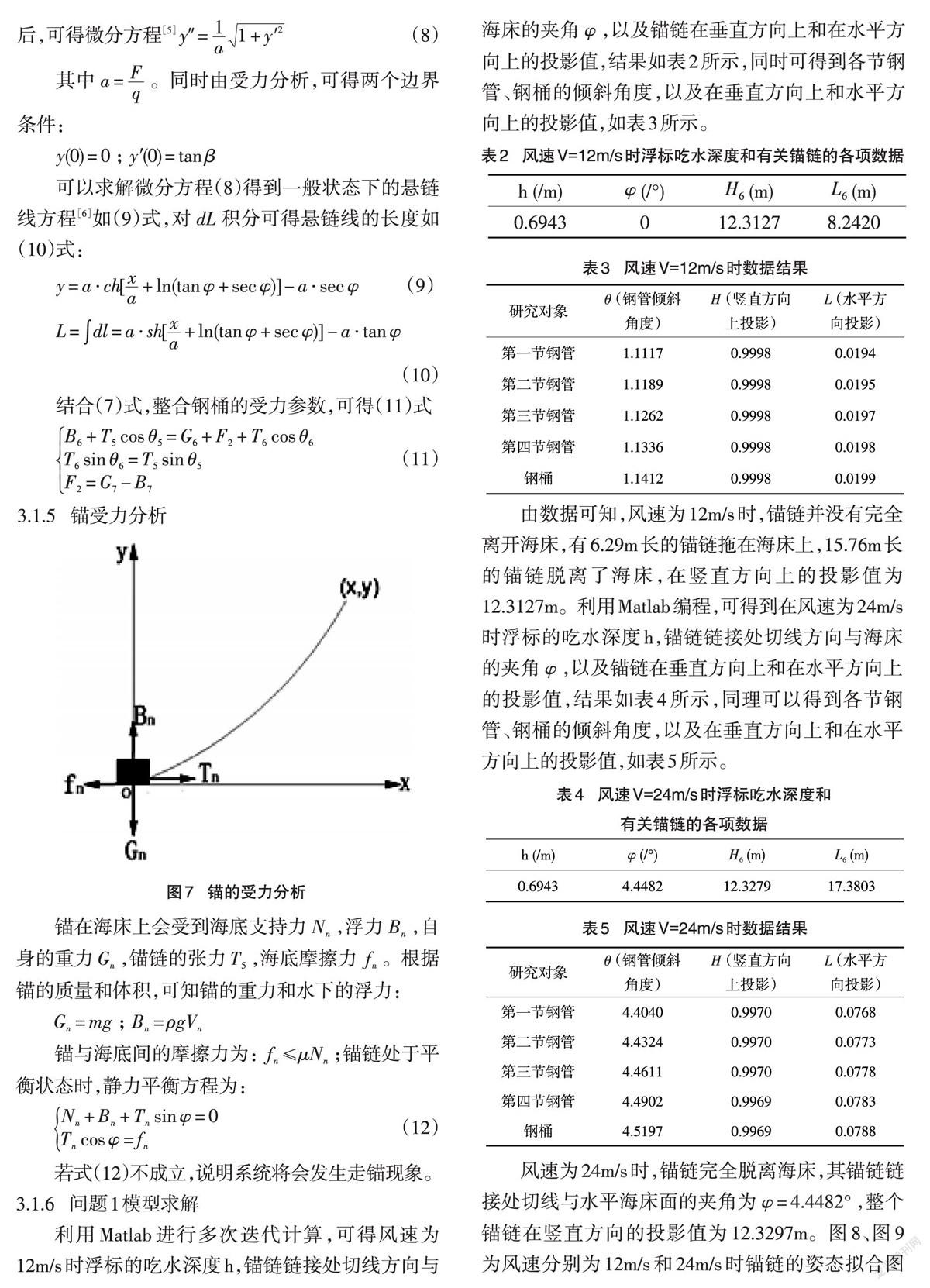
其中[a=Fq]。同时由受力分析,可得两个边界条件:
[y(0)=0];[y'(0)=tanβ]
可以求解微分方程(8)得到一般状态下的悬链线方程[6](9)式,对[dL]积分可得悬链线的长度(10)式:
[y=a?ch[xa+ln(tanφ+secφ)]-a?secφ](9)
[L=dl=a?sh[xa+ln(tanφ+secφ)]-a?tanφ] (10)
[B6+T5cosθ5=G6+F2+T6cosθ6T6sinθ6=T5sinθ5F2=G7-B7] (11)
3.1.5 对锚受力分析
锚在海床上会受到海底支持力[Nn],浮力[Bn],自身的重力[Gn],锚链的张力[T5],海底摩擦力[fn]。根据锚的质量和体积,可知锚的重力和水下的浮力:
[Gn=mg];[Bn=ρgVn]
錨与海底间的摩擦力为:[fn≤μNn];锚链处于平衡状态时,静力平衡方程为:
[Nn+Bn+Tnsinφ=0Tncosφ=fn] (12)
若(12)不成立,说明系统将会发生走锚现象。
3.1.6 问题一模型求解
利用Matlab进行多次迭代计算,可得风速为12m/s时浮标的吃水深度h,锚链链接处切线方向与海床的夹角[?],以及锚链在垂直方向上和在水平方向上的投影值,结果如表2所示,同时可得到各节钢管、钢桶的倾斜角度,以及在垂直方向上和在水平方向上的投影值,如表3所示。
由数据可知,风速为12m/s时,锚链并没有完全离开海床,有6.29米长的锚链拖在海床上,15.76米长的锚链脱离了海床,在竖直方向上的投影值为12.3127米。利用matlab编程,可得到在风速为24m/s时,浮标的吃水深度h,锚链链接处切线方向与海床的夹角[?],以及锚链在垂直方向上和在水平方向上的投影值,结果如表4,同理可以得到各节钢管、钢桶的倾斜角度,以及在垂直方向上和在水平方向上的投影值,如表5:
风速为24m/s时,锚链完全脱离海床,其锚链链接处切线与水平海床面的夹角为[?=4.4482°],整个锚链在竖直方向的投影值为12.3297米。图8、图9为风速分别为12m/s和24m/s时,锚链的姿态拟合图及示意图。
当风速为12m/s时,浮标的游动范围为从锚链脱离海床的点到浮标底面中心在水平方向上的投影值,故浮标的游动范围是以半径R1=8.3403米的圆;当风速为24m/s时,浮标的游动范围为从锚链链接处到浮标底面中心在水平方向上的投影值,故浮标的游动范围为以半径R2=17.7692米的圆,如图10所示:
3.2 问题二模型建立与求解
3.2.1 问题分析
根据问题一的模型,在Matlab程序中带入36m/s时的风速,结果为[θ5=9.3584°],明显大于[5°],同时锚链链接处的切线方向与海床的夹角[?=20.8465°],也大于[16°],此时锚已经处于拖动状态,设备的工作效果较差。采用多重目标规划法,从锚链受到的张力[Tmy]、重物质量[K]两个方面考虑,在程序中输入多组数据, 使其无限逼近目标结果,并确定最终的重物质量。
3.2.2 问题求解
在问题一的假设下,当风速为36m/s时,计算钢桶和各节钢管的倾斜角,锚链形状和浮标的游动区域。首先需要判断该情况下锚链的状态,根据状态情况,运用问题一的模型分析:
1、若[θ5≤5°]且[?5≥16°],则该情况满足设计要求,可直接计算出数据;
2、若[θ5>5°]或[?5>16°],则该情况不满足设计要求,需要调节重物球的质量,采用目标规划的思想,通过输入多组实验数据,无限逼近理想值的方法,从而确定该怎样调节重物球的质量。
运用问题一的模型,利用matlab编程得到关于[Hs]关于[Ty]与[m]的函数关系,调整[Ty]的不同取值使得[Hs]等于18m,从而的判断锚链的状态情况,表6为得到一组数据。
由此数据可知,重物球质量为1200kg,风速为36m/s时,其钢桶的倾斜角度[θ5=9.3584°],明显大于[5°],设备的工作效果较差;同时锚链链接处的切线方向与海床的夹角[?=20.8465°],也大于[16°],此状态下的锚会被拖行,致使节点移位丢失。可通过对重物球的质量m的递增赋值,选取重物球质量为2150kg-2226kg范围的数据,判断赋值的合理性,如表7所示。
根据数据,可以得出以下的结论:
1、重物球的质量越大,浮标的吃水深度越深,同时[?]和[θ5]也会越来越小。
2、在重物球为质量为2200kg左右时,测试的各项数据都临近理想值。可以采用微调重物球的质量,发现在K=2210kg时,[θ5]最接近5°,[?]也十分接近16°。
为验证结果的准确性,利用Matlab对重物球质量[m]以及锚链与锚的夹角[?]的六组数据进行拟合,得到结论,当重物球质量[m]为2210kg时,[?]值最接近16°。将2210kg质量的数据重新带入Matlab的程序中,此组数据为最佳临界数据,故重物球的质量最小要增达到2210kg,才能使得钢桶的倾斜角度不超过5°,锚链在锚点与海床的夹角不超过16°,即节点不发生移位丢失。
3.3 问题三模型建立与分析
3.3.1 问题分析
在问题一、二的基础上,考虑加入水流力、水深情况下的影响,假设锚链长度依旧18m,对于五种不同型号下的锚链,分别改变重物球质量[m]和锚链离开地面的长度[Lm],两个变量值,通过Matlab迭代计算出符合与不符合条件下的五组比较合理结果值,有一个临界点,次临界状况下L的长度为最适宜值。并通过此[L]长度,利用matlab计算出不同状况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域的范围。
3.3.2 问题求解
现考虑风力、水流力和水深情况下系泊系统的状态,各变量对应的阻力表达式如下:
浮标和各节钢管的水阻力:
[Ff1=374πr1V22?(2-h)] (13)
[Ff1=374πrV22?sinθ] (14)
钢桶和重物球的水阻力:
[Ff6=374πr52V22?sinθ5] (15)
[Ff7=374π13?(3m4ρ2)23?V22] (16)
在问题二中程序的基础上,得到引入关于风力、水流力和水深作为变量的优化后的Matlab程序。采用多重目标规划的思想求解锚链长度[L],首先选定布放海域的实测水深[H=18m],然后对锚链长度进行递减赋值,通过Matlab编程计算,得出当水深[h]为18m时的若干锚链长的数据,最后对数据进行拟合分析,得到临界状态下的锚链的最短长度[d]。表9-13是不同型号锚链的测算数据。
根据以上数据拟合可知,I型、II型、III型、IV型、 V型锚链分别在最短长度[d]为31.200m、26.670 m、23.28 m、20.70 m、18.90m,对应重物球质量5920kg、5839kg、5936kg、5513kg、5062kg时,达到临界状态(不发生锚链丢失的状态),通过临界状态下的锚链的最短长度以及相应的重物球的重量,比较各类型锚链的数据,得到不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域,如表14所示。
4 总结
本文通过对单点系泊系统建立静力学模型,综合运用悬链线理论、迭代分析法、多目标规划理论以及Matlab程序计算,比较好地解决了系泊系统在不同风速、水流力、水深和锚链规格情况下的钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域的优化设计问题。对于问题一,建立二维静力学模型,确定各参数变量间相互关系,然后根据所给出的解决问题利用Matlab进行数值检验,对于锚链形状,采用悬链线方程和迭代法。对于问题二,根据问题一的模型,采用多重目标规划法,从锚链受到的张力、重物质量两个方面考虑,并通过Matlab输入多组數据进行迭代计算,使其无限逼近目标结果,并确定最终的重物质量。而对于问题三,在问题一、二的基础上,考虑加入风力、水流力、水深情况等变量,对原有Matlab程序进行优化,通过Matlab模拟计算出符合条件的一个临界值,并通过此临界,分别计算出不同状况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域的范围。
参考文献:
[1] 余龙,谭家华.锚泊线与海地接触的有限元建模及其非线性分析[J].中国海洋平台,2005,20(2):25-29.
[2] 陈徐均,施杰,于群力,等.水流作用下锚泊浮体平衡位置及姿态的求解方法[J].解放军理工大学学报(自然科学版),2007,8(4):362-367.
[3] 胡灵斌,唐军.悬链线的方程及其应用[J].船舶,2004,1:17-20.
[4] 乔东生,欧进萍.深水悬链锚泊系统静力分析[J].船海工程,2009,38(2):120-124.
[5] 王丹,刘家新 .一般状态下悬链线方程的应用[J],船海工程,2007(6) :363.
[6] 张养利,王连昌,李文潮 .悬链线微分方程的另一种解法[J].第四军医大学学报.2001(1):41.
[收稿日期] 2021-04-10
[基金项目] 2018安徽省自然科学基金(1808085MF169);2018年度安徽高校自然科学研究项目(KJ2018A0086)
[作者简介] 李宁(1994 - ) ,男,安徽理工大学电气与信息工程学院硕士研究生,研究方向:工程建模理论与应用。
[通讯作者] 胡霞(1962- ) ,女,安徽理工大学电气与信息工程学院副教授,硕士,研究方向:电力电子、工程建模理论与应用。
