多UAV编队飞行控制技术
2021-01-22钱骘寰,徐英武
钱骘寰,徐英武

[摘 要]无人机作为一种有效的侦察、作战工具,近年来被各个国家广泛运用于军事和民用领域。信息化时代的到来使得战场环境也日趋复杂,单无人机探测范围有限、载荷小等问题也逐渐暴露,为更好的应对各类高难度任务类型,越来越多的学者将目光聚焦于多无人機编队的研究上,多无人机编队拥有更好的任务扩展能力与战场生存概率,故本文旨在研究一种多机编队飞行控制,并完成仿真验证。
[关键词]多UAV;编队飞行;控制技术
[中图分类号]S252 [文献标志码]A [文章编号]2095–6487(2021)12–00–02
Multi-UAV Formation Flight Control Technology
Qian Zhi-huan,Xu Ying-wu
[Abstract]As an effective reconnaissance and combat tool, UAV has been widely used in military and civilian fields by various countries in recent years. With the advent of the information age, the battlefield environment is becoming more and more complex, and problems such as the limited detection range and small load of a single drone are gradually exposed. In order to better cope with various types of difficult tasks, more and more scholars are focusing on In the research of multi-UAV formations, multi-UAV formations have better mission expansion capabilities and battlefield survival probability. Therefore, this article aims to study a multi-aircraft formation flight control and complete simulation verification.
[Keywords]multiple UAV; formation flying; control technology
1 研究背景
无人机编队飞行(coordinated formation flight,CFF)就是把多架具有自主功能的UAV按照一定的结构形式进行三维空间的排列,让其在飞行过程中能保持稳定的所需队形,并且能够根据外部的不同情况以及任务需求进行实时动态调整,从而提升无人机的作战能力,实现整个机群的协同一致性的过程。早在20世纪70年代,NASA就针对无人机的编队飞行进行了大量的风洞、仿真试验,分析了编队间距、数量等因素对单体无人机的气动特性的影响。2004年,波音公司用两架X-45无人机验证了双机编队飞行,并第一次模拟了双无人机协作攻击任务,开创了无人机编队实机飞行的先河。2012年德莱登分型研究中心用两架改装过的RQ-4全球鹰,在13 000 m的高空以紧密编队的形式完成了空中加油,将全球鹰的飞行时长延伸到160 h,大大提高了该机的作战半径与空中停留时间。2017年中国的“彩虹3”无人机编队亮相巴基斯坦国庆阅兵式,成了首次参加阅兵的现役无人机编队。
编队队形保持是多无人机编队飞行的重点与核心,常用的队形控制方法有Leader-follow法、虚拟结构法等。
1.1 Leader-follower法
Leader-follower法最早由Desai在1988年提出,其基本思想是指定一架无人机为长机,其余为僚机。在执行任务时,长机负责航迹跟踪,僚机的任务是保持与长机及邻机的相对位置保持不变。该方法原理简单,是最常用的一种编队方式。这种方式简化了编队系统的控制且易于编队拓扑与工程实现。但不足之处在于一旦长机被破坏,整个编队任务就会失败。此外,如果编队采用链式结构,误差会在层级间累计叠加,当编队受到较大扰动时,会导致僚机编队失败。
1.2 虚拟结构法
虚拟结构法是指选取虚拟点作为长机位置,并通过控制每一架无人机与虚拟点的相对位置实现编队的整体控制。该方法通过设置一个具有运动参数的虚拟长机来模拟实际飞机的飞行行为,编队中所有无人机的位置都由虚拟长机点实时解算给出,因此这种方法很好地避免了长机缺失而引起的编队难以保持的缺陷,但由于整个编队需要传递和共享大量状态信息,因此对通信质量提出了很高要求。
2 模型建立
2.1 编队数学模型建立
通过上文对不同编队控制策略的分析对比,本文选取“Leader-follower”这种易于工程应用的编队控制策略来对无人机编队飞行控制系统进行研究,各僚机通过实时计算当前位置与长机当前的位置间距确定自身的位置,并通过实时跟踪间距指令实现队形的保持。根据两架编队无人机的相对运动关系,首先考虑平面上的横纵向编队距离与偏航角的关系,x、o、y为地面坐标系,选取固连于僚机的气流坐标系作为编队参考坐标系来对两机间的相对运动关系进行建模描述,定义长机相对于僚机的坐标为。
由无人机的相对运动关系可以看出,对于长机和僚机分别有:
(1)
其中,i=L,W;Xi,Yi分别表示长机或僚机在惯性系中的位置坐标,依据三角几何关系,可以得到长机在惯性系中的位置坐标,如式(2)所示:
(2)
对二式两边同时求导可得式(3):
(3)
将式(1)带入式(3)可得到式(4)与式(5):
(4)
(5)
将式(4)左右两边同时乘以,式(5)左右两边同时乘以,将两式相加,可得式(6):
(6)
同样,将式(4)左右两边同时乘以-,式(5)左右两边同时乘以,最后得到的两个式子相加可得式(7):
(7)
高度方向的相对运动可以看作长机和僚机的高度差Zw=ZL-ZW,故可将上述状态方程整理为飞机的编队运动雪模型如式(8)所示:
(8)
通过对一架僚机与一架长机的相对运动关系进行分析,就可以得到两架无人机在编队飞行过程中的数学模型,并且这个模型具有很好的可拓展性,可以拓展到任意数量的无人机编队飞行中。
2.2 编队保持控制系统设计
編队飞行过程中长机的飞行航迹由飞行计划提供,长机独立飞行不受僚机影响,与单架无人机控制方法相同,长机可以根据飞行计划,提取航段,将航段划分为直线和圆弧段进行跟踪。在侧向,无人机将当前的位置与所设定航线的侧偏距离计算偏差,再把偏差作为制导指令输入飞行控制系统中,实时解算无人机副翼以及方向舵舵偏角,再通过无人机的滚转动作改变飞行方向,产生侧向速度,消除侧偏;在纵向通道,无人先解算自身位置与当前高度的偏差,解算升降舵的舵偏操纵量,进行高度的调整;在速度通道,通过与期望航线理想速度做差,获取速度偏差,通过调整油门的开度,实现跟踪航线飞行。
僚机在编队飞行过程中,受到长机与周围僚机的影响,为了自主协同与长机形成编队,僚机首先根据长机的位置与队形要求实时计算出理想的编队位置坐标,在此基础上,为了消除僚机编队的前向、侧向以及高度3个方向上的位置误差并且能快速跟踪长机机动,设计了具有线性混合器的三通道编队保持控制系统,分别为速度通道、航向通道和高度3个通道。根据编队飞行控制系统整体架构,线性混合器通过相对运动学方程结合队形任务目标生成僚机三通道控制指令。
以速度通道为例,描述僚机的控制器结构,线性混合器是长机与僚机i的水平速度误差和x方向上的期望位置误差的线性组合,为僚机的油门输出一个虚拟控制指令,如式(9)所示:
(9)
式中:kvi,kxi分别为前向偏差与两机前向速度偏差的反馈系数。xdi为两机在编队坐标系下的x方向期望相对位置,由期望编队队形给出。将线性混合器的输出作为僚机油门通道的输入,得到僚机的速度控制器结构如式(10)所示:
(10)
3 仿真试验
本文旨在完成一个三机编队的飞行仿真,模拟实际飞行中三机编队做定滚转角盘旋运动,以5°滚转角的飞行模态为例,结合各机的状态参数,分析编队飞行的效果。
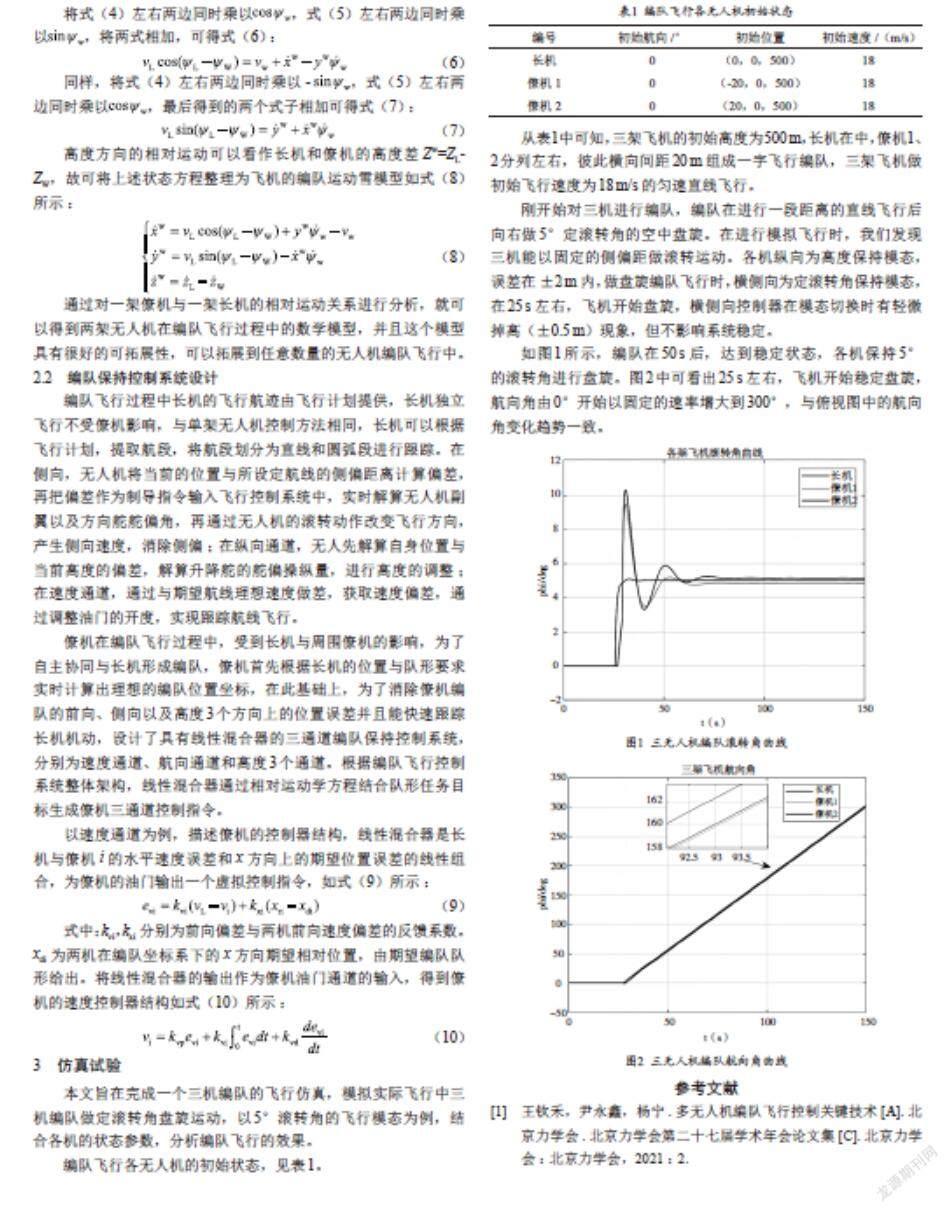
编队飞行各无人机的初始状态,见表1。
从表1中可知,三架飞机的初始高度为500 m,长机在中,僚机1、2分列左右,彼此横向间距20 m组成一字飞行编队,三架飞机做初始飞行速度为18 m/s的匀速直线飞行。
刚开始对三机进行编队,编队在进行一段距离的直线飞行后向右做5°定滚转角的空中盘旋。在进行模拟飞行时,我们发现三机能以固定的侧偏距做滚转运动。各机纵向为高度保持模态,误差在±2 m内,做盘旋编队飞行时,横侧向为定滚转角保持模态,在25 s左右,飞机开始盘旋,横侧向控制器在模态切换时有轻微掉高(±0.5 m)现象,但不影响系统稳定。
如图1所示,编队在50 s后,达到稳定状态,各机保持5°的滚转角进行盘旋。图2中可看出25 s左右,飞机开始稳定盘旋,航向角由0°开始以固定的速率增大到300°,与俯视图中的航向角变化趋势一致。
参考文献
[1] 王钦禾,尹永鑫,杨宁.多无人机编队飞行控制关键技术[A].北京力学会.北京力学会第二十七届学术年会论文集[C].北京力学会:北京力学会,2021:2.