基于主元分析方法的智能导向孔偏心距检测系统设计
2021-01-21洪灵
洪灵
(浙江硕和机器人科技股份有限公司,浙江 金华 321000)
主元分析方法是一种基于多元统计手段的故障处理手段,能够根据原始数据在空间环境中的存储格式,构造全新的潜隐变量区间,再联合映射空间内的主要变化信息,确定执行系统中标量数据的提取统计特征。由于新的映射空间受到原始变量与数据变量的共同影响,故主元分析信息的存储格式必须满足线性组合要求[1-2]。因此,若以电导涡流体系作为执行参考系统,则必须考虑主元分析数据的存储受限问题。
随着单位时间内平均电量输出水平的不断提升,电涡流导向孔会出现明显的半封闭传输行为。为避免上述情况的发生,传统EWMA滤波系统通过感知上下机位间电量差的方式,提取导向孔偏心距的实值厚度水平,再联合下级探伤模块,确定深孔中心偏斜差量的具体指标数值。但这种方法所表现出的偏心距探伤准度过低,始终不能达到预期参数水平。为解决此问题,设计基于主元分析方法的新型智能导向孔偏心距检测系统,并借助电涡流传感器的硬件设备,确定自适应检测的实际控限范围。
1 系统硬件设计
智能导向孔偏心距检测系统硬件运行环境由电涡流传感器、超声发射接收放大电路、压控增益模块3部分组成,具体搭建方法如下。
1.1 电涡流传感器
电涡流传感器位于智能导向孔偏心距检测系统中部,由电缆输出线、传输线路板、导向螺母等多个结构共同组成。其中,检测插头直接与超声发射接收放大电路相连,可借助电缆输出线将交流电子运送至其他元件设备中,在此情况下,电源指示灯、检测指示灯均处于常亮状态。电涡流线路能够疏导探头壳体中的残留电子,并经由传感线路板传输至导向螺母中,从而达到扩充电涡流导向孔传输流量的目的[3-4]。电涡流传感器结构图如图1所示。
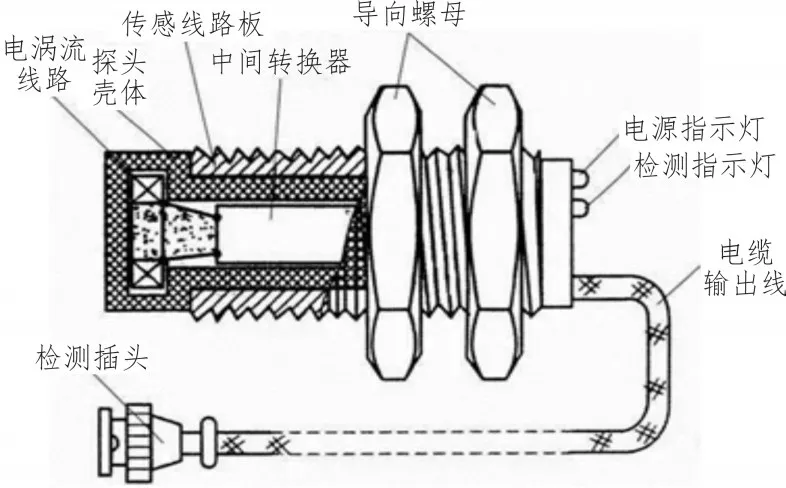
图1 电涡流传感器结构图
1.2 超声发射接收放大电路
超声发射接收放大电路是智能导向孔偏心距检测系统中的唯一电子供应模块,由初级放大回路、电涡流CP机、IC1AT89S51等多个结构共同组成[5-6]。交流电子经由超声输入端进入电路主体,首先进入IC1AT89S51设备,再按照导向孔检测角度的变化情况,选择性地建立与放大回路的等效连接,在确保偏心距数值量不发生改变的前提下,联合发射接收器,将未完全利用的交流电子传输至电涡流CP主机中,最终借助超声电子输出端,反馈回系统的核心检测主机[7-8]。超声发射接收放大电路图如图2所示。
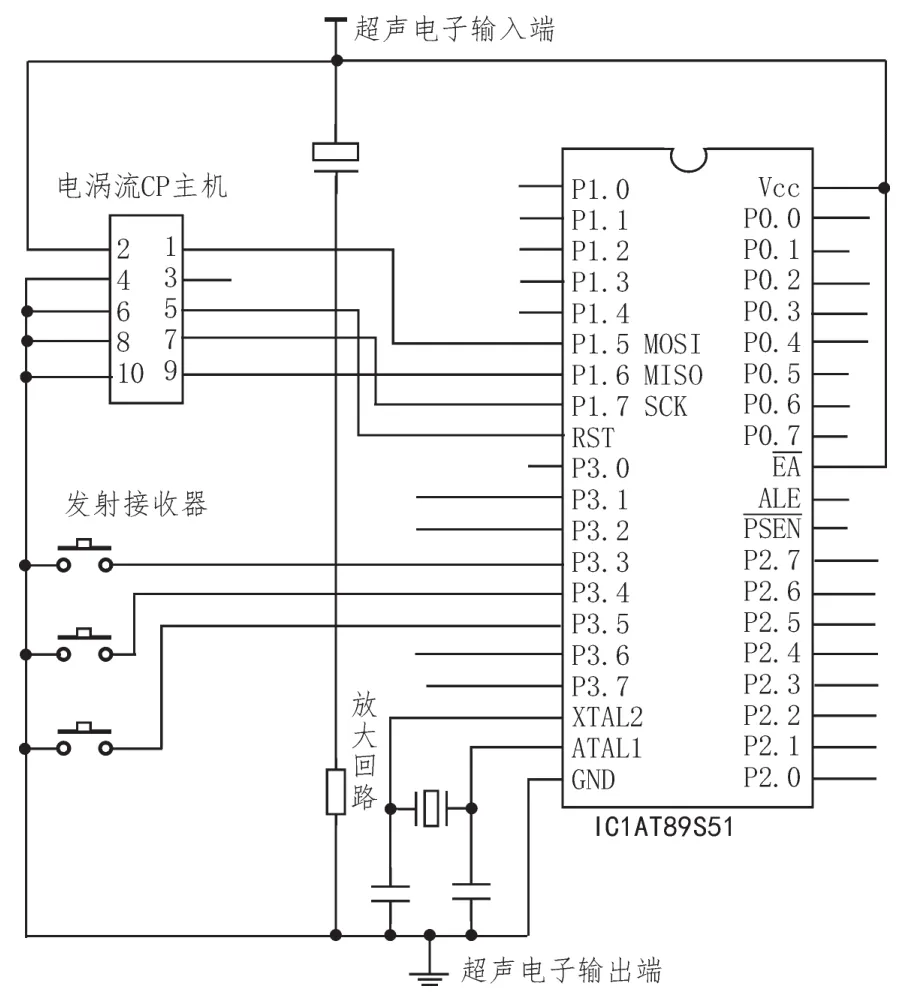
图2 超声发射接收放大电路图
1.3 压控增益模块
压控增益模块作为超声发射接收放大电路的下级负载结构,受到最上端接正电源与接负电源的直接控制。在控制杆前向平移的情况下,电子导向孔持续扩张,偏心距调节芯片与增益处置芯片逐渐向中间位置趋近,直至压控调节元件的形变量完全等于偏心距的实际检测数值;在控制杆后向平移的情况下,电子导向孔持续收缩,偏心距调节芯片与增益处置芯片逐渐向两端位置趋近,直至压控调节元件的真实形变量完全等于零[9]。压控增益模块结构图如图3所示。
2 系统软件设计
在各级硬件执行设备的支持下,按照电量数据压缩及信息提取、主元分析偏心量计算、自适应检测控限的处理流程,实现系统的软件运行环境搭建,两相结合,完成基于主元分析方法的智能导向孔偏心距检测系统设计。
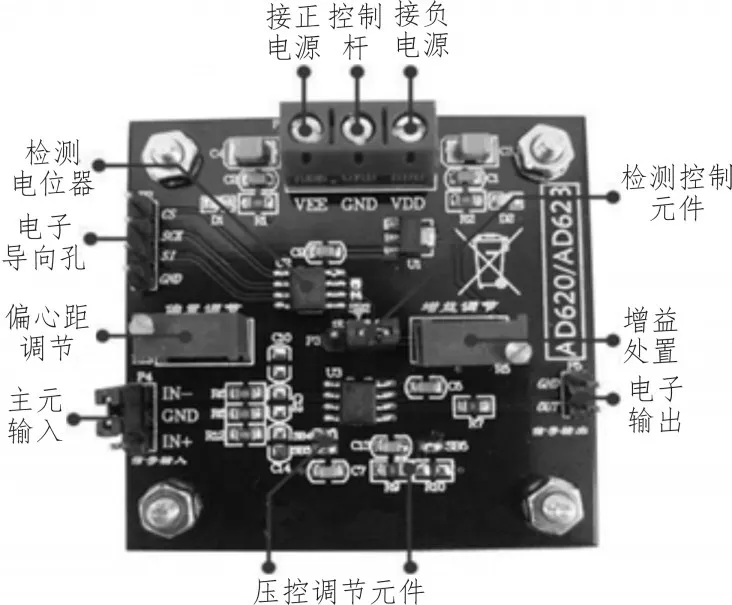
图3 压控增益模块结构图
2.1 电量数据压缩及信息提取
电量数据压缩及信息提取是智能导向孔偏心距检测系统中的重要执行处理环节,以主元分析动量的确定作为初始步骤,可联合电涡流传感器、压控增益模块等硬件设备结构,控制主元输入设备与偏心距检测元件间的实际间隔数值[10-11]。在超声发射接收放大电路始终保持定量输出的情况下,压控增益模块的控制杆设备会出现持续前倾的变化趋势,从而使导向孔偏心距实值不断扩张,直至等于传感线路板能负载的最大输出数值。在此过程中,偏心距转角的数值水平也随之增大,直至完全满足主元分析方法的实际应用条件[12]。电量数据信息的具体压缩提取流程为:首先,确定主元分析动量,将动量结果分别输入电涡流传感器和压控增益模块中,得到实际间隔数据,根据数据结果控制杆设备,保持其前倾状态,最后,实现电量数据压缩及信息提取。
2.2 主元分析偏心量计算
主元分析偏心量直接决定了智能导向孔的扩张程度,受到电子数据总量、控距检测参数的直接影响[13-14]。电子数据总量常表示为 f,在既定检测时间内,可随系统信息输出条件的增加而不断累积,但不对智能导向孔的实际存在状态设置明确限制,即能够完全适应偏心距的延长与缩短行为。控距检测参数常表示为d˙,与压控增益模块的处理行为保持相同的变化趋势,具有较强的检测分析适应性。联立上述物理量,可将主元分析偏心量的计算结果表示为:
其中,y代表智能导向孔的扩张参量,λ代表既定检测时间系数,e代表偏心距检测系统所负载的电子输出条件。
2.3 自适应检测控限
自适应检测控限是基于主元分析方法的智能导向孔偏心距检测系统搭建的末尾设计环节,受到上部处置权限、下部处置权限的共同影响[15-16]。假设导向孔偏心距的实际偏移条件为p,在此情况下,上部处置权限制约了检测距离的最大位移水平,而下部处置权限制约了检测距离的最小位移水平。在不考虑其他作用影响的情况下,自适应检测控限的分布范围越广,系统电涡流导向孔的封闭状态也就越明显。联立公式(1),可将自适应检测的控限表达式定义为:
其中,u1代表偏心距检测的上部处置权限,u0代表偏心距检测的下部处置权限,A代表主元分析方法的最大作用系数,l代表导向孔偏移向量,w代表偏心量的实值计算条件。至此,完成所有软硬件系统环境的搭建,实现基于主元分析方法智能导向孔偏心距检测系统的顺利应用。
3 系统实用性检测
为验证基于主元分析方法的智能导向孔偏心距检测系统的实效性,设计如下对比实验。选取两台执行状态完全相同的控制主机作为实验应用设备,其中实验组主机搭载新型智能导向孔偏心距检测系统,对照组系统搭载EWMA滤波系统,在既定检测时间内,分别记录相关实验指标的具体变化情况。
3.1 检测环境搭建
通过人工干预的方式,更改接入实验主机的检测系统型号,多次调节各项电力指标,使输出系数条件逐渐趋于理想数值水平[17],再借助核心控制主机记录各项检测应用指标的实际数量值。
3.2 深孔中心偏斜差量
深孔中心偏斜差量直接影响电涡流导向孔的半封闭水平,通常情况下,前者数值越大,后者封闭越明显。图4、图5反应了在40 min检测时间内,实验组、对照组深孔中心偏斜差量的具体变化情况。
图4 实验组深孔中心偏斜差量
图5 对照组深孔中心偏斜差量
对比图4、图5可知,实验组、对照组深孔中心偏斜差量均呈现阶段性波动的变化趋势,单从极限数值的角度来看,实验组最大值仅达到30%,远低于对照组最大值49%。综上可知,应用基于主元分析方法的智能导向孔偏心距检测系统,可大幅降低深孔中心偏斜差量的数值水平,对缓解系统电涡流导向孔的半封闭行为具有极强促进作用。
3.3 偏心距探伤准度
偏心距探伤准度也能影响电涡流导向孔的半封闭水平,通常情况下,前者数值越小,后者封闭越明显。表1、表2反应了在40 min检测时间内,实验组、对照组偏心距探伤准度的具体变化情况。
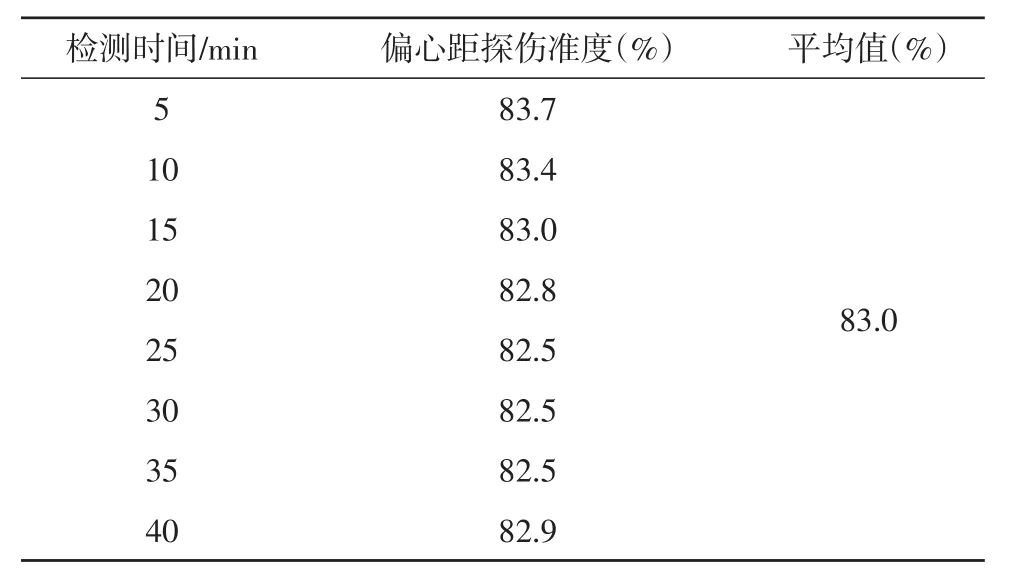
表1 实验组偏心距探伤准度
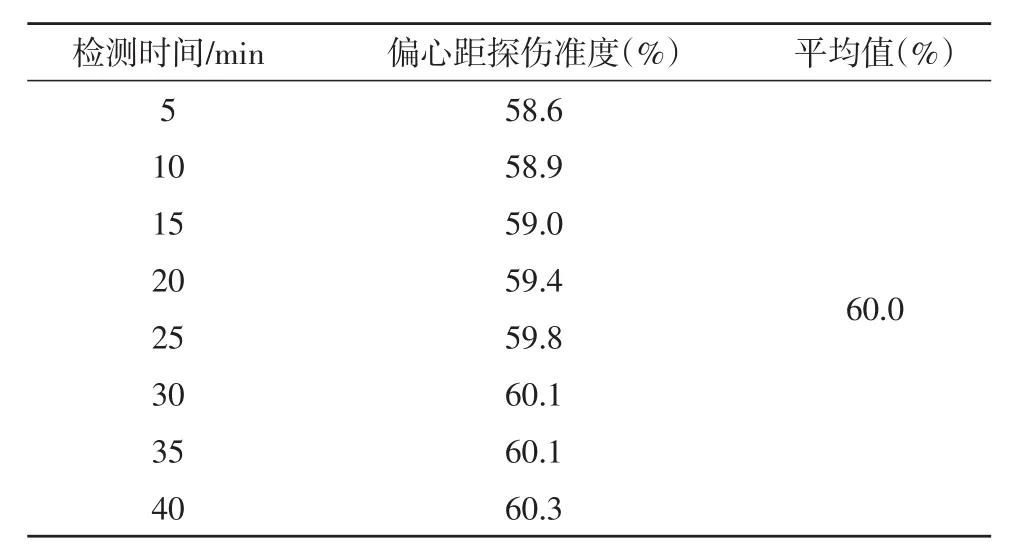
表2 对照组偏心距探伤准度
对比表1、表2可知,实验组偏心距探伤准度前期不断下降,达到稳定状态后,开始小幅上升,全局最大值达到83.7%;对照组偏心距探伤准度前期不断上升,达到稳定数值水平后,开始持续波动变化,全局最大值达到60.3%。综上可知,应用基于主元分析方法的智能导向孔偏心距检测系统,可提升偏心距的探伤准度,降低系统电涡流导向孔的半封闭行为的出现几率。
4 结束语
新型智能导向孔偏心距检测系统在主元分析方法的支持下,针对电涡流导向孔半封闭行为过于明显的问题实施改进,联合压控增益模块、超声发射接收放大电路等硬件设备,在计算主元分析偏心量的同时,确定自适应检测的实际控限区间[18]。对比实验结果显示,深孔中心偏斜差量的降低能够带动偏心距探伤准度的提升,完全解决系统电涡流导向孔半封闭行为过于明显的问题。