针对多波束测深数据的抗差稳健估计滤波算法研究 ①
2021-01-15闻亚,梁丁
闻 亚, 梁 丁
(1.安徽省教育厅无人机开发及数据应用重点实验室;2.皖江工学院,安徽 马鞍山 243031)
0 引 言
多波束测深数据是测绘水底地形的必要数据,它是通过布置在测量船上的多波束测深系统获取的。其原理是利用声波在水中的传播时间和速度来计算水深,进而得到此处水底的高程[1]。由于测量船在水面上会不停摆动且发射的声波遇到水下障碍物时也会反射信号,这就会导致获取的测深数据出现异常或者虚假信号[2]。为了提高多波束测深数据的可靠性,要求在数据处理的时对测深数据异常值进行探测和剔除。目前测深数据异常值的探测方法主要分为人机交互和自动滤波两种方式,人机交互方式需要使用CARIS、Geocap、Triton、MbSystem这类的测深数据处理软件,但是此方式效率较低,并且由于不同人对粗差判读准则的不同也会导致剔除粗差的标准不一样,因此设计一种自动滤波算法来对测深异常值进行探测和剔除成为了国内外学者的主要研究方向[3]。
目前的自动滤波算法主要包括趋势面拟合[4]、Bayes估计[5]、中值滤波[6]以及局部反差和小波分析结合[7]等方法。朱振华[8]提出一种半(非)参数模型来对多波束测深数据中的高程歪曲现象进行修正,然后使用抗差稳健估计方法对其余测深数据异常值进行探测,但是此方法构建的模型比较适合应用于地形变化较小的水底测深数据,不具有普遍的适用性;王为成[9]等提出一种变邻域的抗差估计滤波方法来对测深异常值进行自动探测和剔除,该方法在建立平差模型的基础上,针对邻域中存在异常值时模型出现的变化对异常值进行滤波,通过多次的迭代来对测深数据的异常值进行剔除,但是此方法步骤较繁琐,邻域大小和迭代次数的选择也会对最终的结果产生影响;王乐洋[10]等提出一种基于抗差的最小二乘配置方法来对多波束测深数据异常值进行迭代剔除,此算法在确定测量值初始权阵的前提下先对权方差函数进行抗差拟合,然后通过迭代计算得到最小二乘配置方法的估计参数以及经验协方差函数的参数解,最后利用得到的参数解对测深异常值进行探测和剔除;王海栋[11]等提出一种基于抗差的变异函数拟合方法来解决普通Kriging法中因受多波束测深异常值影响而导致其变异函数偏离正确形状的问题,该方法先基于多波束测深数据计算变异函数的样本值,然后利用高斯模型对变异函数进行拟合并对异常值进行探测和剔除,这有效的提高了异常值探测的效率和稳健性,但是此方法最终的效果取决于变异函数的初始样本值,这要求计算样本值时要选取恰当的测深数据;张志伟[12]等在抗差估计和最小二乘趋势面拟合的基础上,提出一种基于抗差估计的选权迭代趋势面拟合方法,此方法通过对传统的趋势面滤波方法进行赋权处理使其具有抗差性,进而达到提高测深异常值探测和剔除准确性的想过,此方法中权值的确定直接关系到异常值探测和剔除的结果。针对以上方法存在的问题,采用一种基于抗差的稳健估计滤波方法对多波束测深数据异常值进行探测和剔除,进而获取准确的多波束测深数据。
1 Seabat8125多波束测深系统
1.1 工作原理
Seabat8125是目前使用最为广泛的多波束测深系统(如图1),其工作原理(如图2所示)是其搭载的水下声呐系统发射的声波遇到河床或者水底的地物时会产生反射,然后反射信号又被声呐探头所捕获,通过计算其传播时间和速度的乘积就可以得到测量处的水深。多波束测深系统相对于单波束测深系统来说具有更多的换能器,因此它能够以一种全覆盖的方式对水底地形进行测量,以Seabat8125多波束测深系统为例,其具有240个独立的换能器,可以发射夹角为0.5度的扇形声波且可以根据水深自行设置采集数据的频率。Seabat8125系统是以面的形式来对水底地形进行扫描测量,其扫描测量的密度取决于测船的航行速度和测量处的水深。由于声波发射的夹角固定且呈扇形分布,因此中心波束的密度是较高的,从而中心波束相比于边缘波束质量更高[13]。
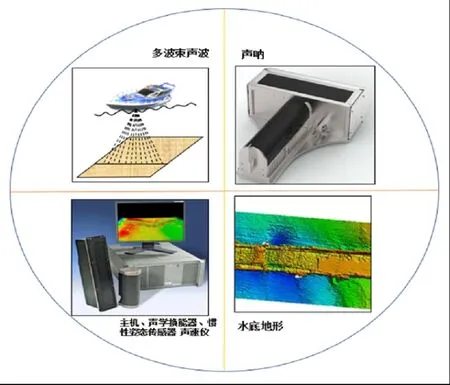
图1 Seabat8125多波束测深系统

图2 多波束测深系统的基本原理
1.2 基本组成
Seabat8125多波束测深系统主要有四个主要组成部分(如图3所示),分别是声学系统、外围辅助设备、数据采集与处理系统以及成果输出系统。
(1)声学系统。声学系统是Seabat8125多波束测深系统的基本组成部分,其主要包括水下声呐单元、多波束信号处理器以及声呐监视器。其中,声呐单元的功能是向水下发射和接收声波而且可以根据不同的水深和信号质量对声波发射的频率进行调整;而多波束信号处理器是用来对接收到的信号进行分析处理。
(2)外围辅助设备。Seabat8125测深系统的辅助设备主要有光纤罗经、运动传感器、全球定位系统以及声速剖面仪。其中,光纤罗经是用来测定测船航行的真方位角,运动传感器主要是提供测船实时的航行姿态,全球定位系统主要是对测船进行实时的定位,声速剖面仪主要是用来改正由于水质不同而受到影响的实际声速。
(3)数据采集与处理系统。该系统主要是由计算机和相配套的数据采集处理软件包组成,可以在外业中实时对数据采集工作进行可视化管理和操作。
(4)成果输出系统。此部分主要是利用数据处理软件对测得的数据进行处理和输出,目前Seabat8125多波束测深系统配套的成果输出系统主要有Trimble的TerramodelvlO.13软件包和CARIS HIPS软件,其可以对多波束数据的异常值进行人工交互处理,也可以使用改系统生成河床的等高线图、断面图以及三维模型等。
2 抗差稳健估计滤波算法
多波束测深系统在测量的过程中由于受到环境和系统自身的影响会产生异常值,为了对异常值进行探测和剔除,需要设计一种自动滤波对多波束测深数据进行处理。目前较为常用的滤波方法主要有门限滤波法和最小二乘曲面拟合法,门限滤波法通过设置上下两个阈值来对测深数据进行滤波,但是此方法比较适合处理平坦河床地形的测深数据,而最小二乘曲面拟合法由于不具备抗差性,因此对测深数据的滤波效果也不够理想[14]。稳健估计是在最小二乘的基础上发展而来的一种数学估计方法,该方法由于具有较好的抗差性,因此可以将其用于多波束测深异常值的探测。基于抗差的稳健估计滤方法的基本原理是通过选取恰当的权函数,通过不断地迭代使得异常值的权值不断变小甚至为零,这样就达到了削弱甚至消除异常值的目的。

图3 多波束测深系统的基本组成
根据稳健估计滤波的思想,某一点的多波束测深值的抗差解由式(1)可以求得:
(1)
其迭代解的公式如式(2)所示:
(2)

(3)

(4)
根据式(2)可以推出某点测深值选权迭代的加权平均值的计算模型如式(5)所示:
(5)

(6)
待检测点的异常值检验标准为:
(7)

3 实例应用分析
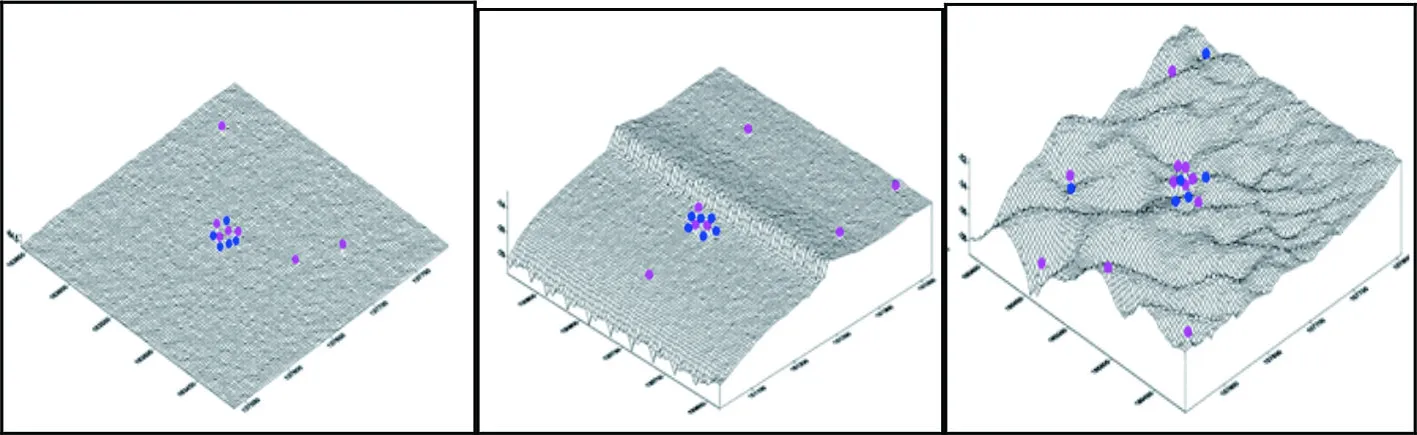
为了检验抗差稳健估计滤波算法对多波束测深异常值的探测效果,使用Seabat8125多波束测深系统对三处地形分别为平坦、倾斜以及起伏的水底进行测量,各测区的大小都是250m×250m。为了检验算法的可行性,对获取的水深数据进行仿真处理(如图4所示),分别在这三种地形中加入幅度大小为~的小异常值、10σ~20σ大异常值以及一部分~20σ的群簇异常值,每种异常值的数量占所有水深点数量的0.5%。图中小异常值的位置用黄色点标出,大异常值用红色点标出,而群簇异常值的位置由绿色点标出。

(a)平坦地形 (b)倾斜地形 (c)起伏地形
为了对本文方法的效果进行验证,分别使用中值滤波法、趋势面拟合滤波法以及基于抗差稳健估计滤波方法对以上测深数据进行处理,得到的结果如下:
(1)中值滤波方法。分别采用5×5、7×7以及9×9这三种不同尺寸的移动窗口对三种地形数据进行基于中值滤波的多波束测深异常探测与剔除实验。表1给出了不同窗口在不同地形下滤波的平均结果,图5是采用7×7窗口的中值滤波法对图4中不同地形异常值剔除后的效果图,图中漏检点处的位置用紫红色点标出,虚警点的位置用蓝色点标出,通过与图4对比可以发现大多数漏检点为小异常值,而群簇异常值所在窗口比较容易出现虚警的情况。

表1 不同大小窗口对三种地形数据异常值的检测统计表

(a)平坦地形 (b)倾斜地形 (c)起伏地形
分析表1中的计算结果可知,中值滤波法对大部分的测深异常值可以准确识别出,但对于小异常值的探测效果较差,而且检测效果与地形的复杂程度有关。随着地形愈加的复杂,中值滤波法对异常值的探测越不敏感,且地形起伏较大时,虚警率较高。当采用不同窗口对同一地形测深数据进行中值滤波时,检测效果也各不相同,通常窗口越小,漏检概率越小,但虚警概率却有所提高,因此使用时需要选择大小恰当的窗口。实验同时发现中值滤波对群簇异常值的检测效果较差,容易在群簇位置出现漏检和虚警的情况。
(2)趋势面拟合滤波方法。对多波束测深数据进行趋势面滤波时,首先需要固定拟合的阶次,然后分别采用5×5、7×7以及9×9的移动窗口对三种地形测深数据进行实验,表2给出了不同窗口对不同地形滤波的平均结果。在固定窗口大小的基础上,选用不同阶次的趋势面对水底地形进行拟合并剔除测深异常值,表3给出了不同阶次的趋势面对不同地形下滤波的平均结果。图6为在采用9×9窗口,阶次取2情况下的趋势面滤波效果图,图中漏检点处的位置用紫红色点标出,虚警点的位置用蓝色点标出。
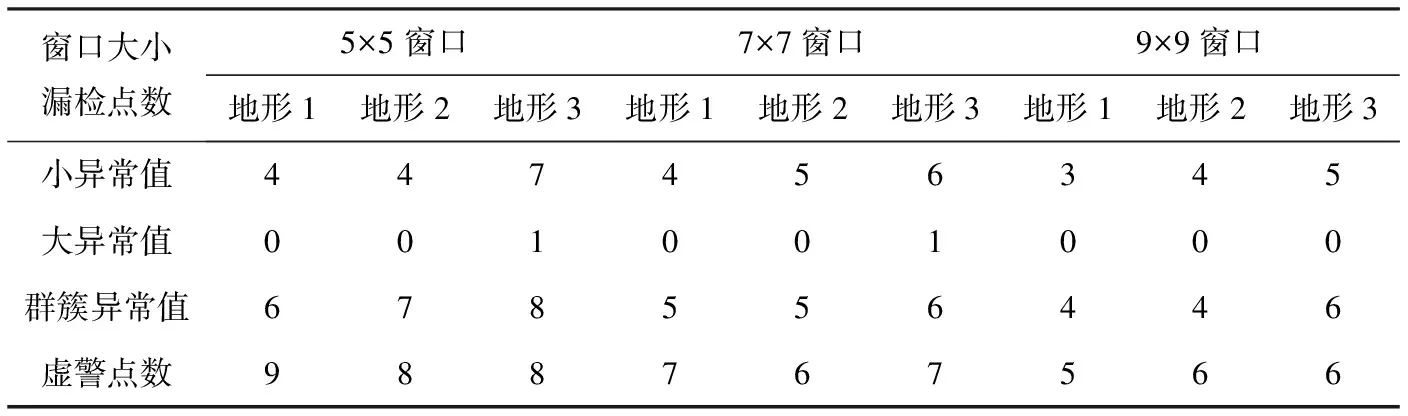
表2 不同大小窗口对三种地形数据异常值的检测统计表(二阶)

表3 不同阶次大小对三种地形数据异常值的检测统计表(9×9窗口)
(a)平坦地形 (b)倾斜地形 (c)起伏地形
分析表2和表3中的数据可知,趋势面滤波法对大的测深数据异常值探测效果较好,但对小异常值的探测效果较差,这是由于趋势面拟合时受到大异常值的影响而不能准确模拟真实水底地形从而导致小异常值被保留引起的。另外趋势面滤波的效果也与选取的阶次有关,阶次过低会使拟合的地形失真,而阶次过高可能使部分异常值被保留。实验发现采用的窗口越大,虚警的概率越小且虚警点通常集中出现在群簇异常值所在的窗口,趋势面滤波对群簇异常值滤波效果较差,通常需要多次滤波才能取得较好的效果。
(3)基于抗差的稳健估计滤波方法。对于加入不同幅度异常值的三种水底地形,分别采用55、77以及99大小的滑动窗口对其进行基于抗差的稳健估计滤波。以77大小的窗口为例对三种水底地形进行处理。得到的效果图如图7所示,图中紫红色点代表的是漏检的点,蓝色点代表的是虚警点,对多次异常值检测的结果取平均值,具体计算结果如表4所示。

表4 不同大小窗口对三种地形数据异常值的检测统计表

(a)平坦地形 (b)倾斜地形 (c)起伏地形
分析表4中的数据可知,基于抗差的稳健估计滤波方法对各种幅度大小的多波束测深异常值都具有较好的探测效果。对于大幅度的异常值,此方法不仅可以全部探测出而且不受窗口大小的影响,但是对于小幅度异常值的探测效果是随着窗口的增大而略有降低的。虽然使用该方法对多波束测深异常值进行探测时会出现虚报警情况,但是虚报警点主要集中在测区边缘。
通过对以上三种自动滤波方法进行对比分析,可以发现基于中值滤波和趋势面滤波的异常值探测方法虽然在探测大的测深异常值有一定的效果,但对小异常值和群簇异常值的探测效果却极不稳定,通常需要对其进行多次滤波,这增加了数据处理的不确定性和繁琐性,而且这两种方法都不具有抗差效果。而基于抗差的稳健估计滤波方法对于不同幅度大小异常值的探测效果都比较好,可以对绝大部分的多波束测深异常值进行探测并剔除,虽然此方法在测区的边缘容易出现虚警情况,但是中间部分的探测精度很高,适用于对多波束测深异常值进行探测和剔除。
4 结 语
在深入分析传统自动滤波方法优缺点的基础上,采用一种基于抗差的稳健估计滤波对多波束测深数据的异常值进行探测和剔除。对实测得到的三种水底地形的多波束测深数据进行仿真处理,使用抗差稳健估计滤波算法对加入不同幅度异常值的测深数据进行实验,然后和中值滤波方法和趋势面拟合滤波方法的实验结果进行对比,结果表明基于抗差的稳健估计滤波方法可以有效的探测和剔除不同幅度的测深数据异常值且不受窗口大小的影响,进而为测绘水底地形提供准确的测深数据。
