基于Unity 3D 的吸力锚安装工艺虚拟仿真系统*
2021-01-12柳依何顾继俊
柳依何,顾继俊
(中国石油大学(北京)机械与储运工程学院,北京102249)
引言
近年来,随着海洋油气资源的探索需求日益增加,吸力锚作为一种新型海洋平台的锚固基础,凭借其施工简便、可反复循环使用、施工周期短等优势,在海上风力电机、海洋石油钻井平台以及浮桶定位等海洋工程结构物中被广泛应用[1]。由于吸力锚造价昂贵、施工环境特殊,需对工程技术人员进行专门的操作培训,传统培训方式受到设备紧缺、作业环境偏远复杂等因素的限制,导致吸力锚施工人员的培养受到限制。针对传统培训方式所存在的诸多问题,对吸力锚安装工艺进行研究,采用虚拟现实技术设计并开发出一套能够模拟海洋环境中吸力锚的施工过程的仿真系统。
虚拟现实技术已被大量应用于工业领域的培训当中,并取得了良好的效果。虚拟现实技术作为仿真技术的一个重要组成部分,由计算机图形学、计算机仿真技术、人机交互技术、多媒体信息处理技术、信息传感技术等多种技术有机融合,是一种依靠计算机网络与信息传感处理而进行运算的交叉性虚拟技术[2]。基于虚拟现实技术,美国纽约州立大学Ankur Baheti 等[3]开发了一套双手6DoF虚拟现实培训系统,通过DVSS 系统成功获取各种腹腔镜手术所需的基本技能。美国纽约哥伦比亚大学Baihan Lin[4]等提出了一种新的虚拟现实环境中的交互模式,此技术可应用于各直播应用、增强和虚拟现实设置,以提供交互式和沉浸式用户体验。澳大利亚格拉兹技术大学Matthias Eder[5]等开发了一套用于学习型工厂工作环境的培训系统,并应用于格拉兹技术大学的培训课程中。
本文对吸力锚安装工艺过程进行了详细研究,并基于Unity 3D 开发了一套海洋环境中吸力锚施工过程的仿真系统,该系统能够为工程技术人员提供一个高沉浸感、交互性更强的虚拟仿真平台、结合硬件设备能够进行逼真的吸力锚施工过程操作教学和培训。
1 虚拟仿真系统架构
该系统基于Unity 3D 进行总体架构,辅助Solidworks、3D Max 软 件 共 同 实 现。Unity 3D 是 由Unity Technologies 公司开发的虚拟现实引擎,该软件具有可视化编程界面、支持Open GL 和Direct11、集成了Phys X3.3 物理系统等众多功能特点,所以在虚拟现实仿真领域具有广泛应用[6]。该仿真系统框图如图1。
吸力锚安装工艺仿真系统主要由前台显示子系统、人机交互系统组成。在前台显示子系统中,采用Solidworks 建模软件对仿真过程中需要用到的作业船舶、吊机、吸力锚、水下机器人、海洋环境等进行建模,并在3D Max 软件中将三维模型进行贴图渲染后转换为FBX 格式,为仿真真实海洋作业环境系统必要设施。在人机交互系统中,将前台显示的物理模型和虚拟场景植入到Unity 3D 虚拟现实引擎中,构建可进行人机交互的虚拟场景以及后台数据实时更新的仿真平台。
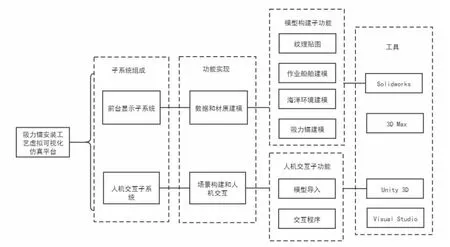
图1 系统框图
2 系统仿真关键技术
2.1 可视化仿真系统设计
仿真系统各功能模块见得逻辑关系如图2 所示。采用Unity 3D 作为仿真软件对海面/海底中的物理环境和水动力进行仿真,通过C#语言编写程序实现海洋环境、灯光系统、声系统、水下粒子系统、水下机器人推进系统和吊机控制系统的仿真。通过多个传感器采集吸力锚在安装过程中的水平度、深度等数据,通过数据管理模块对采集的数据进行管理。
2.2 软件界面设计
在吸力锚实际作业过程中,工程技术人员需要通过ROV 实时对吸力锚上各种仪表的数据变化进行观察,以保证吸力锚能进行正常的施工作业。本系统采用Unity 3D 自带的GUI 组件对系统软件的主界面和吸力锚作业界面进行了设计[7]。在UI 面板中,采用Panel 组件为系统主界面和吸力锚作业界面添加相应背景,新建一个Camera 只用于照射UI 界面,系统主界面如图3 所示,系统主界面共包含3 个功能模块,主要实现的功能包括:吸力锚的安装工艺仿真、吸力锚的拆除工艺仿真、吸力锚的维修工艺仿真,采用C#语言对各功能模块进行编程,点击相应的按键系统界面会跳转到对应的功能界面,点击“退出”便可退出该系统。
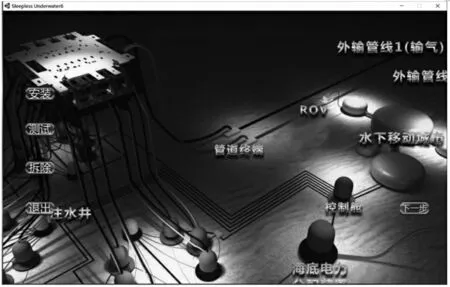
图3 系统主界面
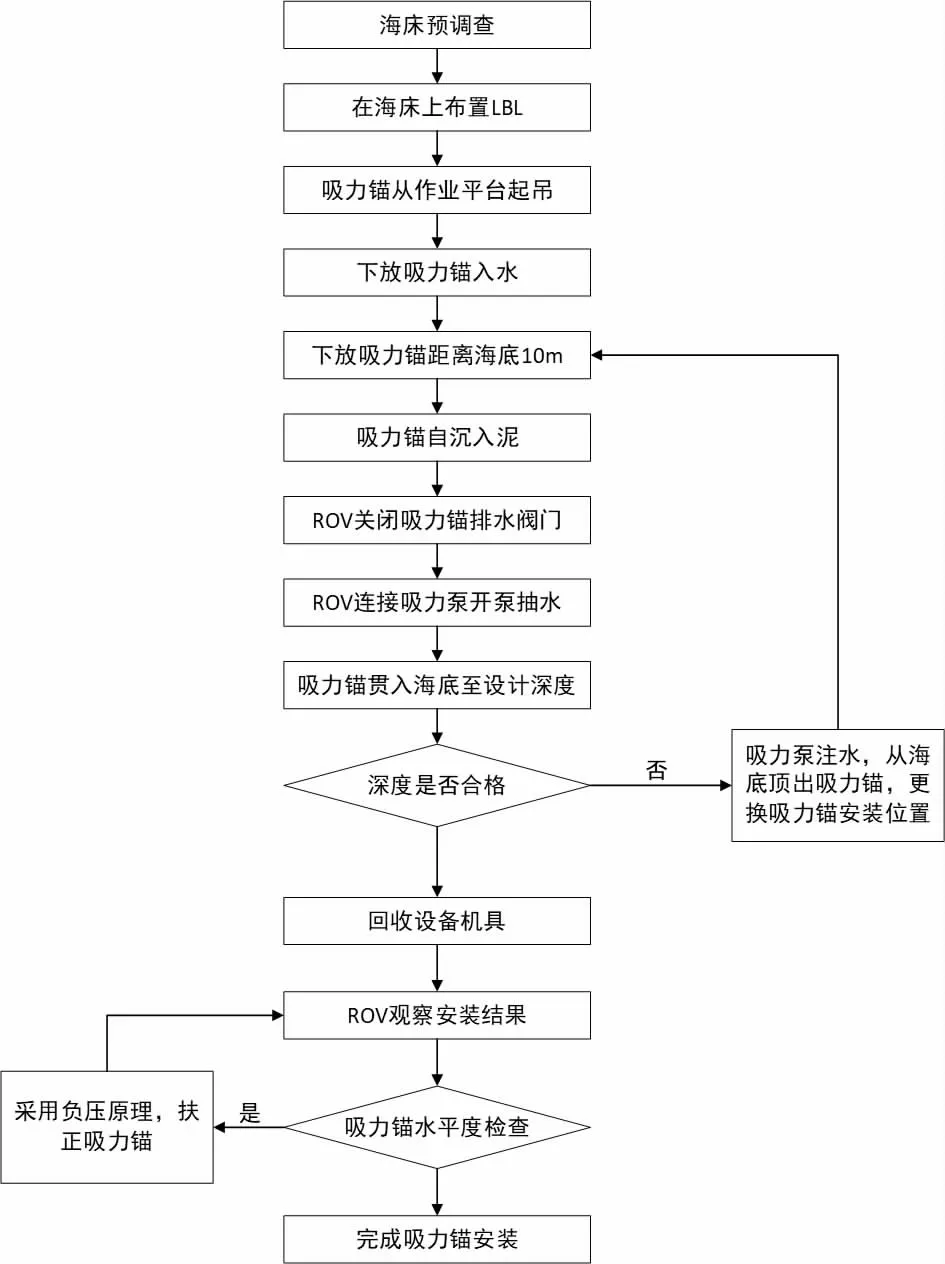
图4 吸力锚安装工艺
2.3 行为控制
行为控制主要有Camera 的视角控制、吊机的升降/旋转控制、ROV 的运动控制。在视角控制中,用户可以通过操作键盘来控制场景的远近以及Camera 旋转;在吊机的升降旋转控制中,用户可通过操作键盘来控制吊机的起吊旋转;在ROV 的运动控制中,用户可对ROV 的运动轨迹以及ROV 机械臂的伸缩旋转进行控制。行为控制功能是通过C#语言编写控制程序脚本,将控制脚本分别附加到需要控制的模型上来实现的。在脚本中,首先获取按键信息,判断键盘上用于控制模型运动的特定按键是否被按下,再根据按键信息执行相应的语句。例如当监测到键盘上的“A”键被按下时,系统会执行控制ROV 前进的语句,以此来实现交互控制[8]。
2.4 碰撞检测
碰撞检测功能在本系统中是至关重要的技术,在本系统中,ROV 上的机械手与泵阀开关之间的碰撞检测功能,是操作人员能够避免碰撞,实现机械手将泵阀开关顺利打开的基础。本系统的碰撞检测算法采用网格碰撞体,即为ROV 上的机械手添加刚体组件和网格碰撞体,为泵阀系统开关添加网格碰撞体,并使用C#语言编写程序,将程序脚本添加到机械手上即可实现碰撞检测功能。在Unity 3D 中,当网格碰撞体发生相交、处于相交状态和相交状态取消时,会分别调用OnTriggerEnter()、On-TriggerStay()、OnTriggerExit()三个函数[9],从而实现碰撞检测功能。
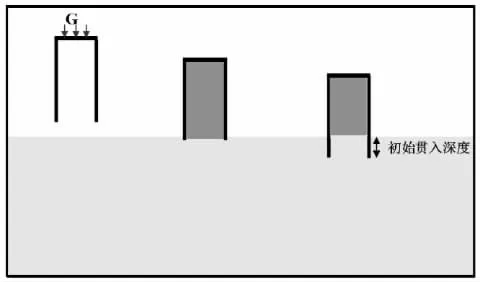
图5 吸力锚自由贯入阶段
3 安装工艺研究及仿真
3.1 安装工艺研究
为了使虚拟仿真过程中的工艺流程更加与实际相符,需要场景的模型运动控制与吸力锚的实际工艺流程一致,因此需对吸力锚的安装工艺进行详细研究,吸力锚安装工艺如图4 所示。
吸力锚的安装工艺是一个相当复杂的过程,主要包括两个阶段,一是吸力锚在自身重力作用下的自由贯入阶段(如图5 所示),二是负压贯入阶段(如图6 所示)。自由贯入阶段即吸力锚在自身重力的作用下沉入海底预定位置,自由贯入之后吸力锚将有一个初始贯入深度,随后进入负压贯入阶段,此时利用水泵将吸力锚内部的水泵吸到吸力锚外部,随着吸力锚内部水的不断排出,吸力锚内部和外部之间将形成压差,此压差即为施加在吸力锚上的吸力,当吸力达到一定程度后,克服吸力锚侧壁摩擦阻力和端部阻力实现负压贯入过程[10]。
吸力锚在贯入泥土过程中,还需通过ROV 对吸力锚上安装的水平仪进行水平度检测,水平度是影响吸力锚承载力的关键因素,挪威船级社要求吸力锚完成后的倾斜度不超过±5°[11],吸力锚贯入到设计深度以后,若水平度符合规范要求,则吸力锚安装工艺施工完成,否则需采用负压原理对吸力锚进行调平操作。单舱型筒型基础一般需要依靠大型机械进行调平,而多筒型和多舱型筒型基础可以通过向高舱处抽气或低舱处注气/水的方法进行调平,本系统仿真用到的吸力锚模型为单筒四舱型吸力锚,故在吸力锚下沉安装过程中,通过ROV 上摄像头观测吸力锚的倾斜情况,并通过注水管线向吸力锚舱室内注水,通过调整各分舱气压来实现控制吸力锚的水平度,直至吸力锚沉贯完毕[12]。
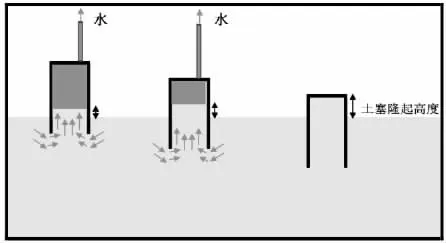
图6 吸力锚负压贯入阶段
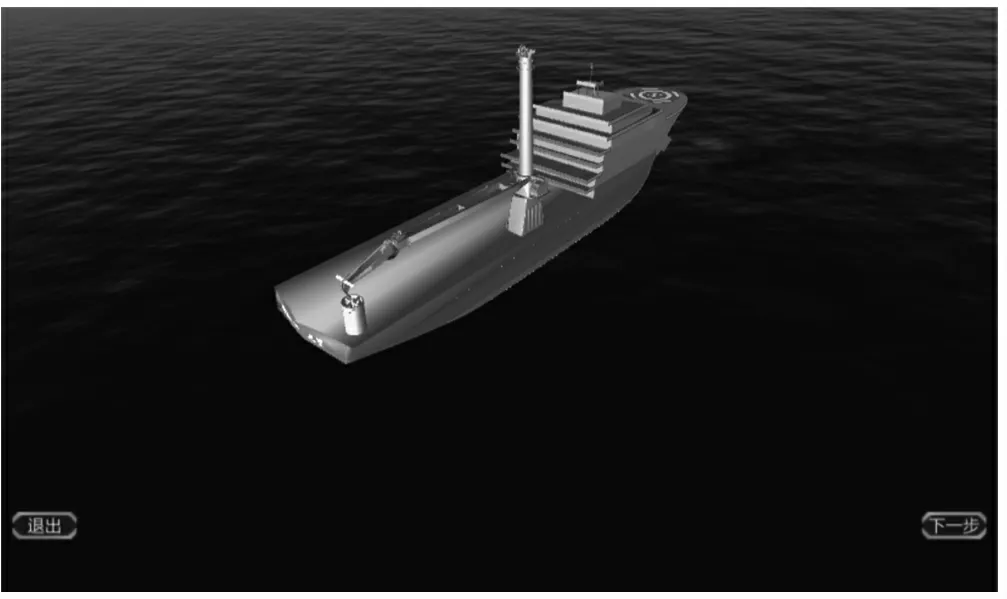
图7 吸力锚等待入水
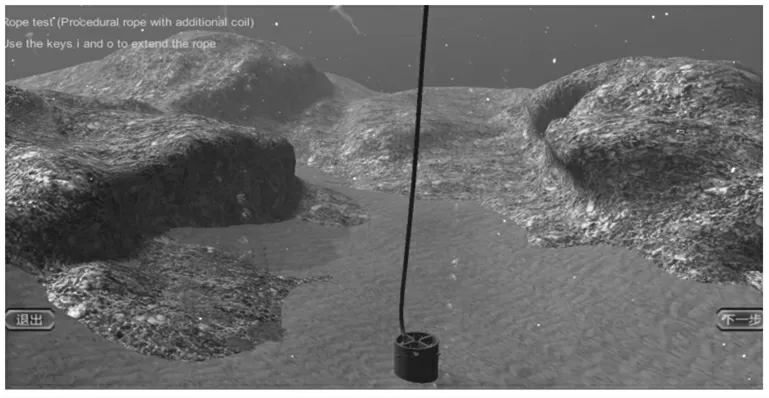
图8 吸力锚自重贯入
3.2 虚拟仿真
对于吸力锚安装工艺仿真,选择更适合深水安装的吊装法对吸力锚进行安装。使用286 作业船上的履带吊将吸力锚及其他设备从码头建造场地吊放到286 船的甲板上,并进行固定。安装船根据GPS 定位系统到达施工区域,用平台吊机将吸力锚放在滑轨上,并运载到绞车附近;将吊索D 形环安装在绞车绳上,为下水做准备,对安装吊索施加拉力,确保吊索没有发生扭转,并没有挂到吸力锚的其它部位,将吸力锚从平台上吊起;将吸力锚移至平台边缘,如图7 所示。
从安装船缓慢放下吸力锚至水中;吸力锚入水后,通过作业船上的吊机将其下放至海床,吸力锚靠自重入泥深度约5m,自重贯入过程中,要使用吊机上的吊钩控制吸力锚的偏移,保证自重贯入的垂直度,并通过注水/气管线控制吸力锚的水平度[13]。吸力锚自重贯入过程如图8所示。
吸力锚自重入泥完成后,通过ROV 上的机械手打开吸力锚上的泵阀开关(如图9 所示),启动泵阀系统,使吸力锚继续贯入并进行多视角观测,并同时通过负压原理对吸力锚的水平度进行控制,当ROV 观测到吸力锚贯入到10m 深度时,ROV 机械手关闭吸力锚的泵阀开关,暂停贯入工作。ROV 通过机械手打开吸力锚筒顶的入孔盖,开始清泥作业。清泥深度0.5~0.6m,误差控制±150mm,以满足吸力锚顶面标高的设计要求。清泥完成后,ROV 再次打开吸力锚上的泵阀开关,将吸力锚贯入至设计深度并进行水平度测试,根据挪威船级社要求吸力锚完成后的倾斜度不超过±5°,如图10 所示,本次测试中吸力锚的倾斜度为4°,测试成功。
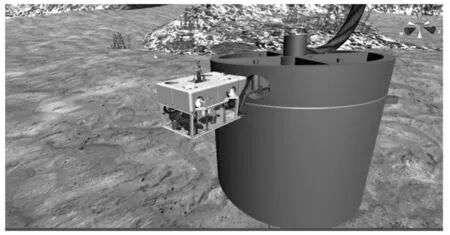
图9 ROV 打开泵阀系统
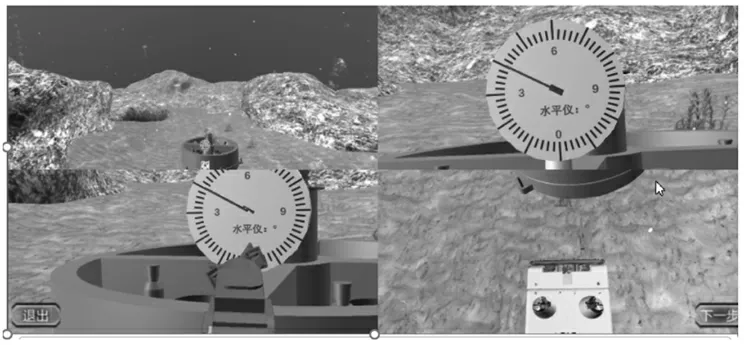
图10 水平度测试
4 结束语
本文主要对吸力锚安装工艺进行了研究,通过Solidworks 三维建模以及3D Max 贴图渲染,使用C#语言进行虚拟现实系统的设计,开发了一套基于Unity 3D引擎的吸力锚安装工艺虚拟仿真系统,并对安装过程进行了测试,测试结果符合工艺要求。该系统具有功能齐全、界面美观、可操作性强,便于进行二次开发等优点,各功能模块严格遵循吸力锚实际安装工艺要求。
