小型全电艇动力总成系统
2021-01-07李素文朱永怀俞万能
李 丽,李素文,2,朱永怀,俞万能,2
(1.集美大学轮机工程学院,福建 厦门 361021,2.福建省船舶与海洋工程重点实验室,福建 厦门 361021)
0 引言
随着船舶推进技术的发展,电力推进系统成为船舶技术发展的研究热点,全电动船也成为面对当今能源范式的有效解决方案[1-2]。全电艇将动力电池作为全艇的动力来源,克服了传统柴油机船舶的排放缺陷,具有无噪声、无污染、高效率的特点,符合节能减排的要求[3-5]。吊舱式推进器作为一种新型的船舶推进系统,具有推进效率高,节省船舶舱室空间,机动性好的特点,能充分发挥电力推进系统的优越性,可以有效提高船舶的使用效能和总体性能[6-10]。因此,本文结合小型吊舱式推进器开发基于DSP(digital sigual processing)推进控制系统,设计并应用于样船的小型全电艇动力总成系统。
1 样船参数要求
样船为小型全电艇,具体结构参数如表1所示。全电艇主要包括船壳、动力电池、吊舱式推进器、DTU/GPS、监控摄像头等硬件设备,船体质量约为90 kg,吃水深度约为0.18m。设计要求:最大航速9.26 km/h;吊舱推进器旋转角度可达到实际运行要求;经济航速(70%转速/负荷)下续航时间可以达到2 h。

表1 船体主要参数
2 动力总成系统设计
本文针对小型船艇动力总成系统,采用直流无刷电机和数字舵机,并结合相关的电机控制算法,自主设计适用于小型船艇的吊舱式推进器。采用锂电池代替传统热机为全艇各系统供电,以DSP(digital signal processing)为核心控制器,采集锂电池组和推进装置的数据,开发全电艇推进控制系统。动力总成系统整体框架如图1所示,研发流程如图2所示。
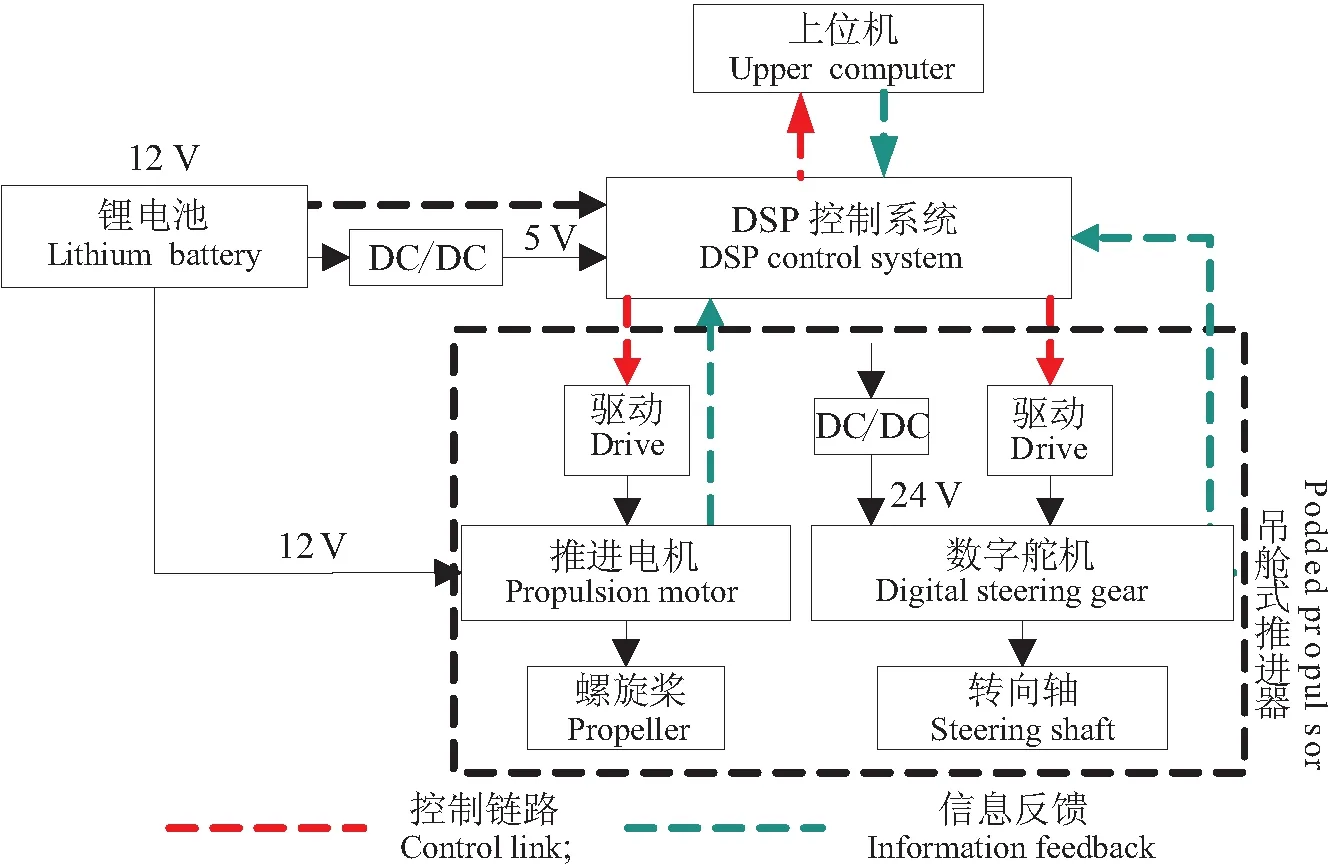
图1 动力总成系统整体框架图

图2 动力总成系统研发流程图
选择一组12V、175 A·h的锂电池作为动力源为整船供电。由于锂电池组固定提供12 V直流电,故需经过12 V/5 V的降压电源为DSP控制器供电,经过12 V/24 V升压电源为数字舵机供电,推进电机选用12 V直流无刷电机,由锂电池组直接供电。
3 控制系统设计
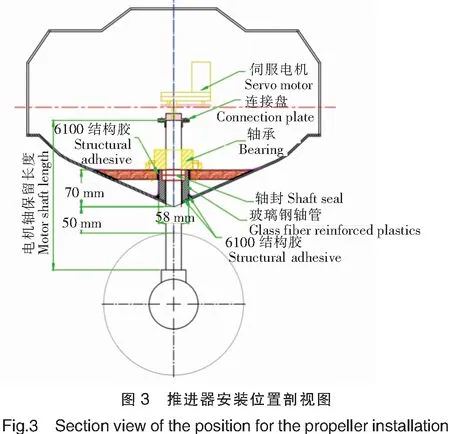
直流无刷电机作为全电艇的推进电机,其额定功率为480 W,最大电流为60 A,最大转速为1100 r/min。吊舱式推进器采用基于DSP控制的数字舵机进行转向控制,具体结构如图3所示。
全电艇运动控制系统以TI公司生产的型号为TMS320F2812的DSP为核心控制器[11]。DSP开发板内部具有2个时间管理器EV模块,共可产生4路独立的PWM波形和12路互补的PWM波形;1个ADC采样模块;2路SCI串口通信接口;1路局域网通信控制器CAN总线接口。DSP开发板的A/D模块采集推进器的电压、电流信息;时间管理器EVA模块用于控制数字舵机;EVB模块用于控制推进电机;电池管理系统所采集到的电压、电流、SOC(state of charge)、温度等电池组信息通过CAN总线通信方式传输给DSP控制器;1路串行通信接口SCI配置成SCI-485通信方式与毫米波雷达进行数据交互[12-14]。全电艇与上位机的数据交互以DTU为传输基站,经DSP处理后的数据信息经RS-232串口发送到DTU,DTU将串口数据转换为IP数据或将IP数据转换为串口数据,通过4G移动通信网络传送到上位机[15]。
全电艇动力总成系统中的直流无刷电机和数字舵机的控制系统,如图4、图5所示。M1为直流无刷电机(推进电机);M2为数字舵机;HA为电池状态报警器;DC/DC为升压/降压电源;Pn为DSP的I/O口;FUn为熔断器;QFn为空气开关;KAn为中间继电器;KMn为接触器;其中n=1,2,3,…。DSP通过RS-232串口接收上位机控制指令,当接收到直流无刷电机M1的启动指令后,DSP开关信号在P1置位,KA1中间继电器(5V)线圈得电,常开闭合;驱动24 V中间继电器KA6线圈得电,常开闭合;接触器KM1主触点闭合,辅助触点闭合(自锁),完成电机启动命令。数字舵机启动原理相同。
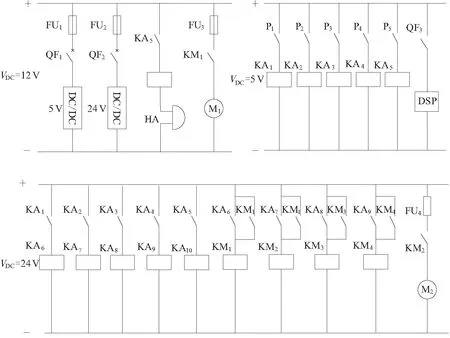
图4 控制系统主电路图
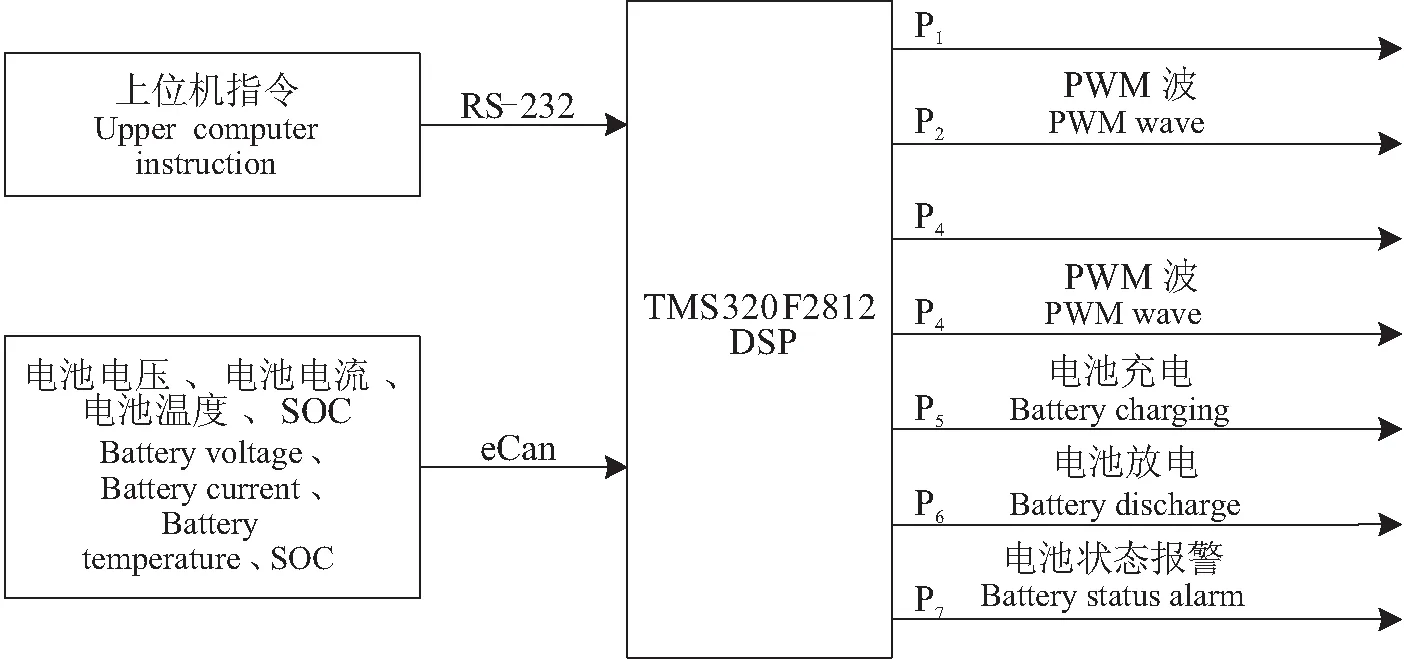
图5 数字舱机控制系统示意图
4 样船测试
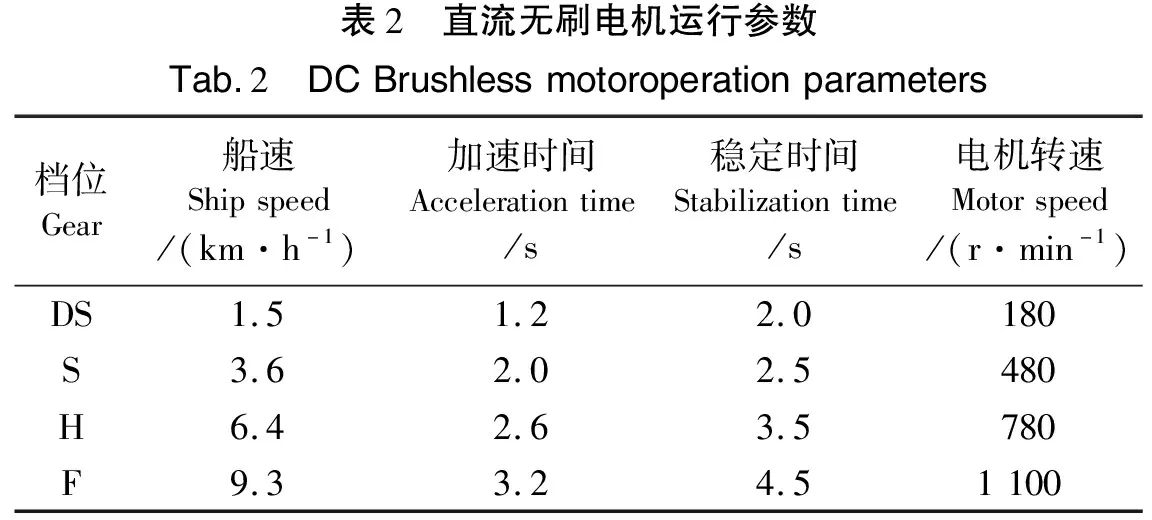
表2 直流无刷电机运行参数Tab.2 DCBrushlessmotoroperationparameters档位Gear船速Shipspeed/(km·h-1)加速时间Accelerationtime/s稳定时间Stabilizationtime/s电机转速Motorspeed/(r·min-1)DS1.51.22.0180S3.62.02.5480H6.42.63.5780F9.33.24.51100
为了验证所设计的小型全电艇动力总成系统是否满足性能要求,于2019年4月至7月在福建厦门水上运动中心先后进行了多次航行测试。
4.1 速度性能测试
将水面全电艇航速分为DS档(微速)、S档(慢速)、H档(半速)、F档(全速)四个档位,其速度分别为1.5,3.6,6.4,9.3 km/h。电机的具体运行参数如表2所示。
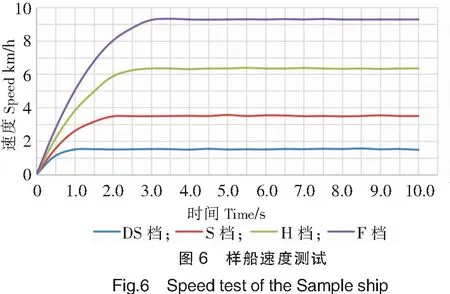
根据样船速度测试数据,绘制出速度从零加速到各个档位的时间-速度图,如图6所示。结合表2和图6的内容可以看出,样船从零加速至各个档位的加速时间较短,且加速至各档位后运行平稳,速度无明显波动。最高档速度可以达到9.3 km/h,加速时间为3.2 s,满足最高船速要求。
4.2 转向性能测试

为了验证数字舵机控制的灵敏性和准确性,本文分别对设定航速、转舵角度下的巡回半径进行了测试。取舵角范围[-60°,+60°],分别对不同航速、转舵角度下的转弯半径进行了测试。在测试过程中,由于没有航行轨迹绘制图,所以测试完成后需对MySQL数据库存储的数据进行分析处理。根据经纬度、船速、转舵角度等数据作运算分析,结合航速和航向大小变化进行数据拟合,得到样船运动轨迹图,如图7所示。图中①②③④分别为船速在9.0,6.0,3.5,1.5 km/h时,舵角增加至60°的航行轨迹。并且以此方法得到了不同给定航速、航向下的巡回半径,如表3所示。表3中,当船速为9.3 km/h,舵角φ>30°时,船舶横倾角大于15°,海水会漫过全电艇甲板,故未进行测试。图7和表3的内容可以表明,本文所设计开发的小型全电艇动力总成系统可以满足不同航速下转舵的灵活性和准确性要求。
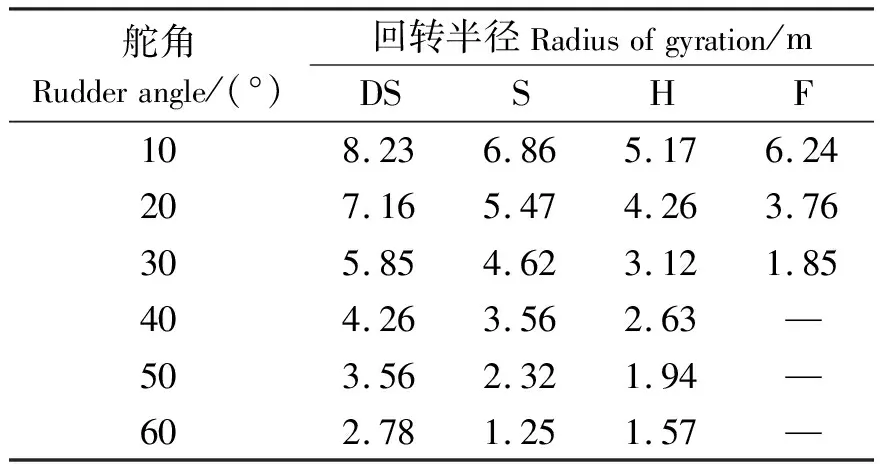
表3 巡回半径测试数据
4.3 续航能力测试
一般情况下电池最佳运行时间在SOC处于90%~30%之间,为测试所选锂电池是否能够满足全电艇续航能力要求,剩余续航力按全电艇运行至SOC为10%计算。在整个样船试航过程中,以经济航速运行2 h后,电池剩余电量43%,理论剩余续航力1.7 h。全电艇续航能力满足要求,并且续航时间远超于期望的续航时间。
5 结论
本文以小型水面全电艇动力总成系统为研究对象,将锂电池组作为动力源为全艇供电,采用数字舵机和直流无刷电机及相应的控制算法,设计了小型水面全电艇的吊舱式推进器,并将其应用在相应样船上;采集电池管理系统和推进器的数据,结合DSP技术,开发了相应的全艇动力控制系统;根据全电艇设计参数和性能要求,研发了小型全电艇动力总成系统,并对所设计样船进行测试。测试结果表明,本文自主设计的小型吊舱式推进器运行正常,控制精度高,转舵灵活;锂电池组、推进电机、数字舵机的选型均能满足水面全电艇性能要求,最高船速可以达到9.3 km/h,经济航速下续航时间满足3.7 h,该小型全电艇动力总成系统运行平稳。
