基于光频域反射和互相关算法的分布式振动传感系统
2021-01-04李信宇文泓桥
刘 晓,车 前,李信宇,文泓桥
1.武汉理工大学机电工程学院,湖北武汉430070
2.武汉理工大学信息工程学院,湖北武汉430070
3.武汉理工大学光纤传感技术国家工程实验室,湖北武汉430070
当前,光纤传感技术已广泛运用于周界入侵探测、结构健康监控等领域[1-5],其中振动测量是周界入侵和结构健康监控的重要项目.采用相干外差检测技术的光频域反射(optical frequency domain reflectometry, OFDR)振动传感系统以其高空间分辨率、高信噪比、高灵敏度的优势引起了众多研究学者的兴趣[6].
在基于OFDR 瑞利散射信号实现振动传感测量的研究中,文献[7-8]提出了正弦扫频光频域反射技术(sinusoidal frequency scan OFDR, SFS-OFDR),打破了激光器线性度的限制,不需要额外的辅助干涉仪补偿相位噪声,但是该系统只能实现振动的定位,无法实现振动频率的测量;文献[9]通过连续测量瑞利散射光谱频移量实现了振动信号的分布式测量,系统空间分辨率达10 cm,但测试长度只有17 m,测量频率范围仅为0∼32 Hz;文献[10]搭建了测量距离为12 km、空间分辨率为5 m、扰动频率达2 kHz 的振动传感系统,该系统使用移动窗对光纤进行分段,利用互相关算法分析瑞利散射信号,从而实现振动信号的分布式测量,但系统的定位精度和准确度相互制约.
本文基于OFDR 系统提出了采用重叠移动窗的互相关算法来实现振动信号的分布式测量,并通过实验对比确定了合适的SCOT/PHAT 加权互相关算法.实验表明,本方案在改善OFDR 系统定位精度的同时提高了互相关图形的信噪比,减少了虚警率,从而提高了系统的准确度,并且系统可测频率范围广.
1 系统振动传感原理
互相关是评估信号相似度的常见算法,当两组信号相似度很高时,互相关图中只有一个明显的互相关峰;反之当两组相似度很低时,在主互相关峰附近会出现很多杂峰.通过计算互相关图中超过某一阈值的峰值点数来衡量两组信号的“非相似水平”,阈值一般取互相关峰最大值的一半[10].本系统分别采集两组待测光纤的瑞利散射信号,其中一组信号为无振动状态,另一组信号的状态未知.对采集的两组信号分别进行相位补偿,使用傅里叶变换将信号变换到拍频域即距离域,再以合适的移动窗将距离域信号分成对应不同位置的瑞利散射信号,利用互相关算法计算不同位置对应的瑞利散射信号的“非相似水平”,则非相似水平增高到一定程度所对应的位置即为发生振动的位置.瑞利散射信号容易受到随机噪声的干扰,使得信号的信噪比和频谱特性都不够理想,从而影响了振动信号的判断,因此本系统采用了广义互相关算法.先求两组信号的互功率谱密度,在频域内对信号进行加权滤波,再进行逆傅里叶变换得到互相关函数,从而改善信号的信噪比,提高系统对振动信息判断的准确度.两组信号的互相关函数为

式中,W(f)为权函数,G12(f)为所采集两组信号的互功率谱密度,τ为两组信号对应的时延.
系统的振动定位精度为∆x=N∆z,其中N为移动窗中瑞利散射信号的点数,∆z为每个数据点的空间分辨率.N值越大,互相关的信噪比越高,振动信号的虚警率越低,但振动的定位精度越差.如图1所示,若采用重叠的移动窗,则相邻移动窗的中心点间距变小,在系统准确度不变的情况下提高了系统的定位精度.一般重叠部分取移动窗宽度的一半,此时定位精度为原系统的一半.

图1 用于信号分段的移动窗Figure 1 Sliding window used for dividing signals into segments
瑞利散射信号在距离域由拍频大小为fb的主峰和频率为fb±nfc,其中fc为振动频率,公式为

式中,m为主峰与第1 级旁瓣之间的数据点数,∆f为OFDR 系统的频率分辨率.
2 实验系统
本实验搭建光路系统如图2所示,其中TLS 为可调谐激光器,C1∼C5 为耦合器,C1 分光比为1∶99,C3 分光比为5∶95,C2、C4、C5 分光比均为50∶50,PC 为偏振控制器,FUT 为待测光纤,APC 为光纤接头,PD 为光电探测器,BPD 为平衡探测器,DAQ 为数据采集卡.
首先光源由分光比为1∶99 的耦合器C1 分成两束,其中一束进入辅助干涉仪,用于完成光源非线性效应的补偿;另一束进入主干涉仪,并且其中95%的光通过环形器进入待测光纤,所产生的瑞利散射信号与5%的参考光发生拍频干涉,拍频信号由平衡探测器将光信号转换为电信号后进行采集和解调.此外,待测光纤的末端置于无水酒精中,以减少末端的菲涅尔反射.本系统使用偏振控制器来控制光的偏振态,从而抑制偏振衰落对系统带来的不利影响.系统选用的可调谐激光光源为santec TSL 550,线宽为200 kHz,设置扫频范围为1 549.5∼1 550.5 nm,扫频速率为100 nm/s,光功率为10 dBm,数据采集卡的采样率为250 MHz.实验中辅助干涉仪的臂差为120 m,测试光纤长度为44 m.

图2 实验装置Figure 2 Experimental setup
3 实验结果与分析
3.1 振动信号的定位
将40∼44 m 处的传感光纤缠绕在压电陶瓷传感器(piezoelectric ceramic transducer,PZT)上,用于模拟待测的振动信号.广义互相关算法中常见的权函数有基本互相关(crosscorrelation, CC)、ROTH 处理器、平滑相关变换(smoothed coherence transform, SCOT)、相位变换(phase transform, PHAT),所对应的表达式如表1所示,其中G11(f)、G22(f)分别表示通道1、2 所采集信号的自功率谱密度[11].

表1 广义互相关算法的加权函数Table 1 Weighted functions of generalized cross-correlation algorithm
为了确定测试环境下性能最好的加权函数,在无振动情况下基于OFDR 系统采集了两组相似的信号(一组作为参考信号,另一组作为测试信号),并设置加窗点数为600,重叠比例为50%,得到了这两组信号基于4 种不同加权函数的广义互相关图,如图3所示.4 种加权函数互相关图形的信噪比分别为0.69 dB、1.74 dB、7.33 dB、7.33 dB.

图3 不同加权函数的广义互相关图Figure 3 Generalized cross-correlation maps based on different weighted functions
保持上述实验中装置和参考信号一致,用信号发生器产生50 kHz 的正弦波驱动PZT 作为测试信号,同样对信号分别进行4 种加权函数的广义互相关分析,阈值取最大值的一半.待测光纤的非相似度水平如图4所示,CC、ROTH 加权法未能准确判断振动,存在较大的虚警率,而基于SCOT/PHAT 加权的广义互相关算法的“非相似水平”在40∼44 m 范围内很高,表明该位置发生了振动,符合实验设置.此时,系统振动的定位精度为0.247 m.
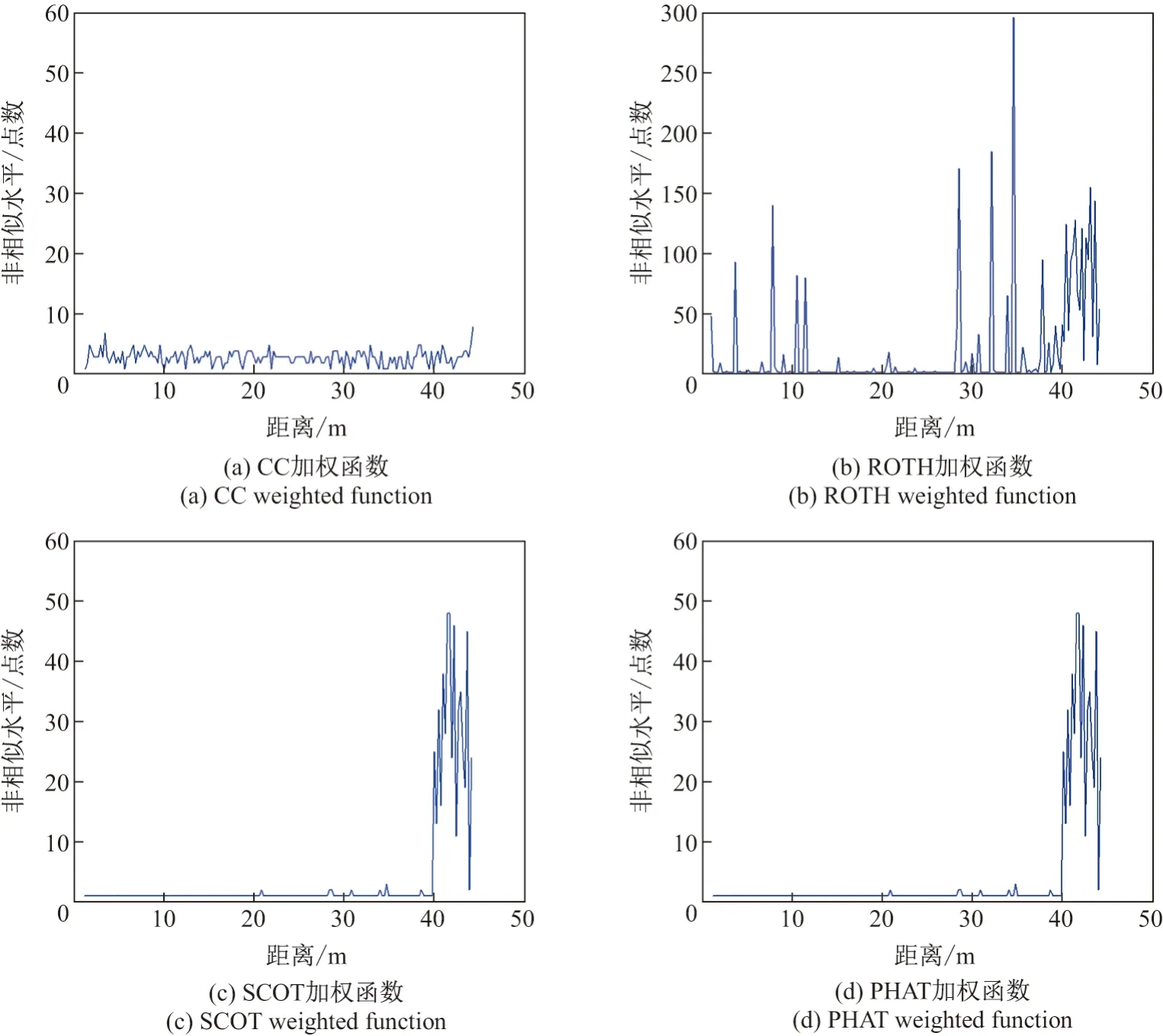
图4 基于不同加权函数广义互相关算法的“非相似水平”Figure 4 “Non-similar level” of generalized cross-correlation algorithm based on different weighted functions
实验表明:相比于另外两种加权法,SCOT 和PHAT 加权法同时考虑了两个通道的影响,提高了互相关图形的信噪比,从而可以较好地抑制背景噪声对系统的影响.因此,基于SCOT 和PHAT 加权函数的互相关算法提高了系统定位的准确性,降低了振动信号的虚警率,更适合测试环境.
3.2 振动频率的解调
分别采用5 kHz、10 kHz、30 kHz、50 kHz 作为PZT 的正弦驱动电压频率,电压幅值均为5 V,加窗点数目分别取400、600、1 000、1 600,重叠比例取50%,并采用基于SCOT/PHAT加权的广义互相关算法进行解调,阈值取最大值的一半.解调结果如图5所示,系统准确判断了振动信号的频率,且可测频率范围广.
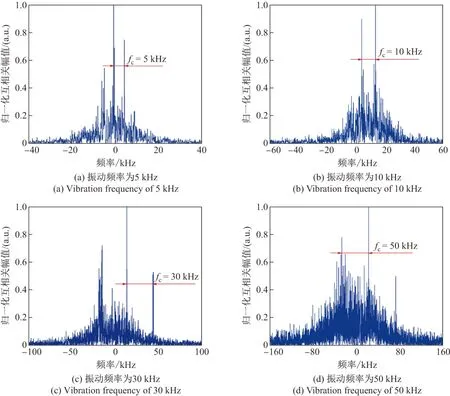
图5 不同振动频率下的广义互相关图Figure 5 Generalized cross-correlation maps of different vibration frequencies
4 结 语
本文通过互相关算法实现了OFDR分布式振动信号的定位和频率测量.系统采用重叠的移动窗对解调信号进行分段,提高了系统的定位精度;通过实验对比了不同加权函数的广义互相关算法,确定了能降低系统虚警率的SCOT/PHAT 加权法.实验结果表明:系统的定位精度可达0.247 m,可测频率范围5∼50 kHz,对高频振动信号的检测具有重要意义.
