压电陶瓷驱动系统的设计与研究
2020-12-28陈姝雨王学亮
陈姝雨 王学亮
摘 要: 针对光刻机投影物镜中使用压电陶瓷对像质补偿镜组进行精密定位控制的需求,设计一种压电陶瓷驱动系统,并着重对其精度性能进行了分析与研究。首先对系统进行了误差项分解,然后对各误差项进行详细的理论计算,最后将所有误差项的影响按最差情况合成,所得结果满足设计要求。进而试制了系统样机,并对其性能进行实验验证,结果表明,压电陶瓷驱动系统的误差不超过80 mV,与理论分析的结果符合,满足压电陶瓷驱动系统的设计指标。
关键词: 压电陶瓷; 驱动系统; 系统设计; 误差项分解; 精度分析; 实验验证
中图分类号: TN876?34 文献标识码: A 文章编号: 1004?373X(2020)24?0034?04
Design and research of piezoelectric ceramics driving system
CHEN Shuyu1, WANG Xueliang2
(1. Northeastern University, Shenyang 110819, China; 2. University of Chinese Academy of Sciences, Beijing 100049, China)
Abstract: In allusion to the requirement that the piezoelectric ceramics is used in the projection objective of lithography machine to execute precise positioning control of image quality compensating mirror group, a piezoelectric ceramics driving system is designed and its accuracy performance is analyzed emphatically. The error term is decomposed for the system, and then each error term is calculated theoretically in detail. The influence of all the error terms is synthesized according to worst case, and the obtained results meet the design requirements. A prototype of the system was trial?manufactured and its performance was verified by experiments. The results show that the error of the piezoelectric ceramics driving system is less than 80 mV, which is consistent with the theoretical analysis and meets the design indexes of the piezoelectric ceramics driving system.
Keywords: piezoelectric ceramics; driving system; system design; error term decomposition; precision analysis; experimental verification
0 引 言
光刻机作为极大规模集成电路工艺关键设备,为了满足10 nm量级特征尺寸的半导体加工需求,其投影物镜对成像质量的要求极为严苛,常常需实现纳米量级的系统波相差。但是在光刻投影物镜的实际加工、装配及工作过程中不可避免地存在元件公差、装配误差以及外部环境引起的各种像差,因此会在投影物镜中配置位置可调的镜片予以补偿[1?4],通常其定位执行器应具有10 nm量级的典型定位精度。
压电陶瓷[5?6]材料以其无磁性干扰、定位分辨率高、发热量小等特点广泛用于光刻机投影物镜中像差补偿镜的定位执行器[7?13]。本文针对上述应用场景分析设计一种压电陶瓷驱动系统,并对其进行了实验验证。
1 系统设计
1.1 设计目标
根据光学设计和结构设计的计算结果,要求某光刻机投影物镜的像差补偿系统具有优于5 μm调节行程、优于550 N的输出力以及10 nm量级的定位分辨率。因此选择PI公司P?885型压电陶瓷作为定位执行器。
P?885.11型压电陶瓷的输入电压为100 V,位移6.5 μm。根据驱动P?885型压电陶瓷实现10 nm量级精密定位的要求可知,压电陶瓷驱动系统应满足以下指标:
1) 驱动系统的输出电压为0~100 V;
2) 驅动系统的输出精度为154 mV;
3) 驱动系统带宽为100 Hz。
1.2 系统结构
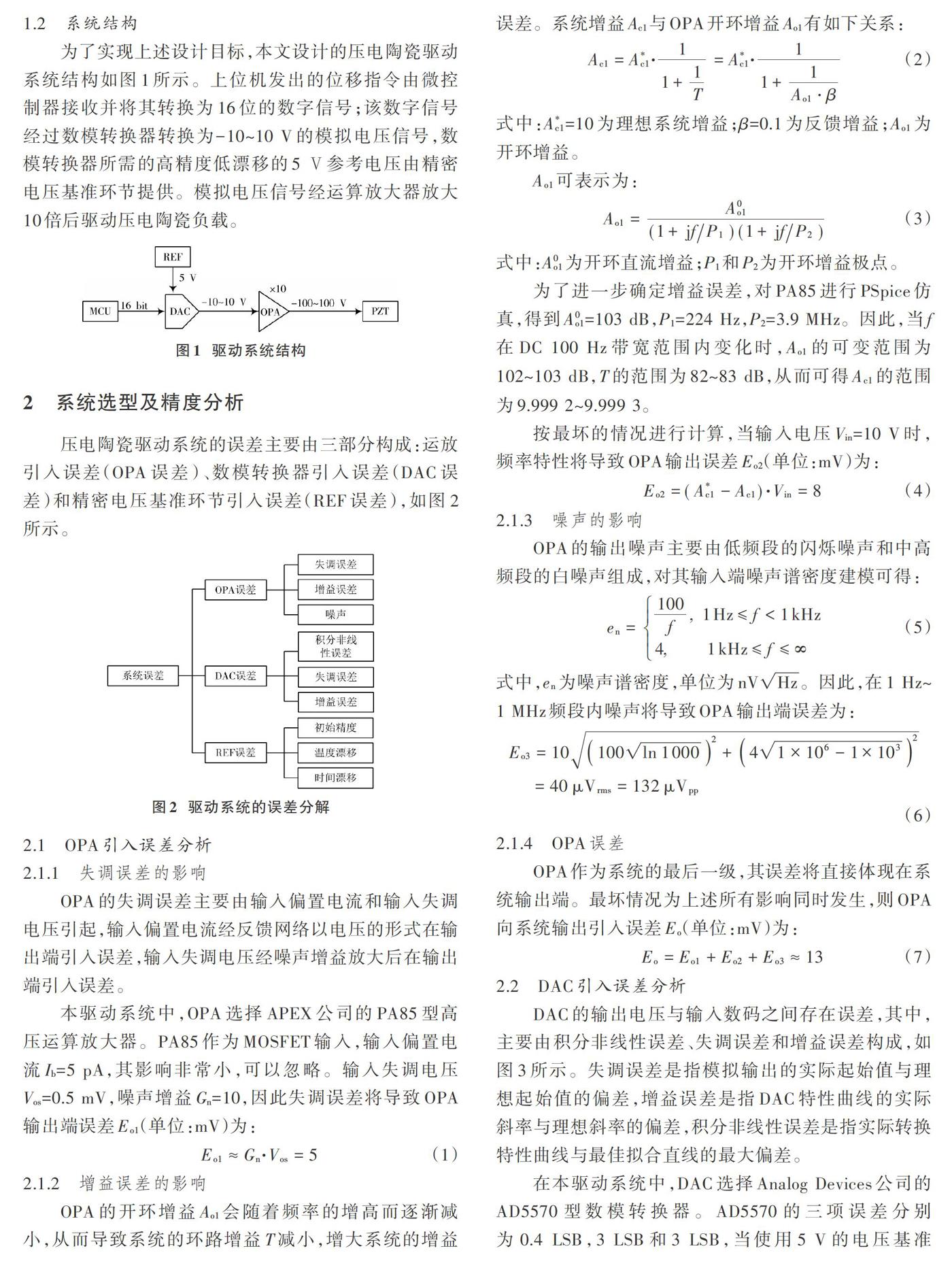
为了实现上述设计目标,本文设计的压电陶瓷驱动系统结构如图1所示。上位机发出的位移指令由微控制器接收并将其转换为16位的数字信号;该数字信号经过数模转换器转换为-10~10 V的模拟电压信号,数模转换器所需的高精度低漂移的5 V参考电压由精密电压基准环节提供。模拟电压信号经运算放大器放大10倍后驱动压电陶瓷负载。
2 系统选型及精度分析
压电陶瓷驱动系统的误差主要由三部分构成:运放引入误差(OPA误差)、数模转换器引入误差(DAC误差)和精密电压基准环节引入误差(REF误差),如图2所示。
2.1 OPA引入误差分析
2.1.1 失调误差的影响
OPA的失调误差主要由输入偏置电流和输入失调电压引起,输入偏置电流经反馈网络以电压的形式在输出端引入误差,输入失调电压经噪声增益放大后在输出端引入误差。
本驱动系统中,OPA选择APEX公司的PA85型高压运算放大器。PA85作为MOSFET输入,输入偏置电流Ib=5 pA,其影响非常小,可以忽略。输入失调电压Vos=0.5 mV,噪声增益Gn=10,因此失调误差将导致OPA输出端误差[Eo1](单位:mV)为:
[Eo1≈Gn·Vos=5] (1)
2.1.2 增益误差的影响
OPA的开环增益Ao1会随着频率的增高而逐渐减小,从而导致系统的环路增益T减小,增大系统的增益误差。系统增益Ac1与OPA开环增益Ao1有如下关系:
[Ac1=A*c1·11+1T=A*c1·11+1Ao1?β] (2)
式中:[A*c1]=10为理想系统增益;β=0.1为反馈增益;[Ao1]为开环增益。
[Ao1]可表示为:
[Ao1=A0o1(1+jfP1)(1+jfP2)] (3)
式中:[A0o1]为开环直流增益;P1和P2为开环增益极点。
为了进一步确定增益误差,对PA85进行PSpice仿真,得到[A0o1]=103 dB,P1=224 Hz,P2=3.9 MHz。因此,当f在DC 100 Hz带宽范围内变化时,[Ao1]的可变范围为102~103 dB,T的范围为82~83 dB,从而可得[Ac1]的范围为9.999 2~9.999 3。
按最坏的情况进行计算,当输入电压Vin=10 V时,频率特性将导致OPA输出误差[Eo2](单位:mV)为:
[Eo2=(A*c1-Ac1)·Vin=8] (4)
2.1.3 噪声的影响
OPA的输出噪声主要由低频段的闪烁噪声和中高频段的白噪声组成,对其输入端噪声谱密度建模可得:
[en=100f, 1 Hz≤f<1 kHz4, 1 kHz≤f≤∞] (5)
式中,[en]为噪声谱密度,单位为[nVHz]。因此,在1 Hz~1 MHz频段内噪声将导致OPA输出端误差为:
[Eo3=10100ln 1 0002+41×106-1×1032 =40 μVrms=132 μVpp] (6)
2.1.4 OPA误差
OPA作为系统的最后一级,其误差将直接体现在系统输出端。最坏情况为上述所有影响同时发生,则OPA向系统输出引入误差[Eo](单位:mV)为:
[Eo=Eo1+Eo2+Eo3≈13] (7)
2.2 DAC引入误差分析
DAC的输出电压与输入数码之间存在误差,其中,主要由积分非线性误差、失调误差和增益误差构成,如图3所示。失调误差是指模拟输出的实际起始值与理想起始值的偏差,增益误差是指DAC特性曲线的实际斜率与理想斜率的偏差,积分非线性误差是指实际转换特性曲线与最佳拟合直线的最大偏差。
在本驱动系统中,DAC选择Analog Devices公司的AD5570型数模转换器。AD5570的三项误差分别为0.4 LSB,3 LSB和3 LSB,当使用5 V的电压基准时1 LSB=0.3 V。最坏情况下,三项误差叠加在DAC输出端,再经OPA放大后向系统引入误差[Ed](单位:mV):
[Ed=0.4+3+3×0.3×10≈19] (8)
2.3 REF引入误差分析
2.3.1 初始精度的影响
REF初始精度是指器件在不受外界条件影响的条件下其自身性能导致的输出偏差。本驱动系统中,REF选择Linear Technology公司的LTC6655型电压基准。LTC6655的初始精度为0.025%,其额定输出为5 V,这将导致REF输出端误差[Er1](单位:mV)为:
[Er1=0.025%×5=1.25] (9)
2.3.2 温度漂移的影响
在实际工作条件下,环境温度很难保持恒定,这将导致REF的输出电压出现漂移,进而向驱动系统引入误差。LTC6655的温漂系数为2 ppm/℃,并假设工作环境存在50 ℃的温度变化,这将导致REF输出端误差[Er2](單位:mV)为:
[Er2=2×10-6×5×50=0.5] (10)
2.3.3 时间漂移的影响
随着系统工作时间的增加,REF器件的性能逐渐发生变化,这也将导致REF的输出电压出现漂移,进而向驱动系统引入误差。LTC6655的时漂系数为60 [ppmkHr],因为半导体时漂系数会以指数规律减小,故取前2 000 h内时漂导致REF输出端误差的总和[Er3](单位:mV)作为时漂的最终影响:
[Er3=60×10-6×5×1+13=0.4] (11)
2.3.4 REF误差
REF作为系统的第一级,其误差将经过DAC的前端网络和OPA的电压放大,在最坏情况下,上述所有影响发生叠加,REF向系统输出引入误差[Er](单位:mV)为:
[Er=Er1+Er2+Er3×40=86] (12)
2.4 系统误差
综合以上的分析可以看到,本文设计的压电陶瓷驱动系统输出精度[E](单位:mV)约为:
[E=Eo+Ed+Er=118] (13)
满足系统设计指标。同时可以看到,电压基准经过DAC前端网络和OPA的两次电压放大,对于驱动系统的精度影响最大,可以使用不带有前端增压网络的DAC以进一步减小系统误差。
3 系统验证
根据上述的设计与研究,制作压电陶瓷驱动系统的样机,如图4所示。
对该样机进行性能实验,输出端的直流电压使用Agilent公司3458A型8位半数字万用表来测量。实验过程中,使用示波器监测系统的输出电压,待其稳定后方可读取万用表的测量值。
上位机控制驱动系统以10 V为增量逐步改变系统输出量,观测并记录驱动系统输出的实测值,与预期值进行比较,结果如表1所示。
从实验结果可以看出,在0~100 V的电压输出范围内,系统实际测得的直流电压与预期值之间的偏差均小于80 mV,该结果与理论分析及系统设计指标相符,基本满足光刻机投影物镜中使用压电陶瓷进行精密定位的要求。
4 结 语
本文设计了针对光刻机投影物镜中使用压电陶瓷对象质补偿镜组进行精密定位控制的驱动系统。对所设计样机进行了性能实验,通过观测得到驱动系统的实际输出值满足理论分析的设计指标,表明压电陶瓷驱动系统符合设计要求。目前该项技术已应用到光刻机投影物镜的研发之中,其对定位控制精度有较好的改进效果,对后续精密定位控制的研究具有指导借鉴意义。
参考文献
[1] 张巍,于新峰,周连生,等.精密光学系统的热像差[J].光学精密工程,2015,23(11):3033?3040.
[2] 诸波尔,李思坤,王向朝,等.基于多偏振照明的浸没式光刻机投影物镜高阶波像差快速检测技术[J].光学学报,2018,38(7):1?9.
[3] 范占斌,戴一帆,关朝亮,等.集成应变反馈层的横向压电驱动变形镜面形预测及闭环控制[J].儀器仪表学报,2018,39(6):34?40.
[4] 刘志祥,邢廷文,蒋亚东,等.大数值孔径物镜的波像差测量及其特殊问题[J].光学精密工程,2016,24(3):482?490.
[5] 侯静,吴成东,董再励,等.基于AFM的虚拟纳米手操作策略研究[J].仪器仪表学报,2013,34(5):1167?1172.
[6] 王学亮,李佩玥,郑楠,等.运放对压电陶瓷驱动电路系统精度影响的研究[J].电子测量技术,2014,37(10):33?36.
[7] 曹小涛,李德全,李洪文,等.非共振式压电直线电机精密驱动及定位控制[J].光学精密工程,2017,25(8):2139?2148.
[8] 王学亮,巩岩.光刻物镜中压电陶瓷驱动器的动态性能研究[J].光子学报,2012,41(9):1071?1075.
[9] 安凯.压电驱动器电压及其频率对驱动速度的影响[J].现代电子技术,2014,37(13):113?115.
[10] 葛川,李朋志,章明朝,等.基于ARM的高分辨率压电陶瓷驱动电源[J].现代电子技术,2013,36(14):166?170.
[11] 郭嘉亮,李朋志,李佩玥.压电陶瓷定位系统电容传感器容错控制[J].现代电子技术,2014,37(21):152?155.
[12] 赵碧杉,尹达一,曾攀,等.高精度大功率压电陶瓷驱动关键技术[J].压电与声光,2013,35(6):853?857.
[13] 陈俊,徐志伟,陈杰.压电驱动器驱动电源设计[J].国外电子测量技术,2014,33(4):48?53.
[14] 李海宁,王海峰,崔宜梁,等.不同脉冲电压对压电喷墨液滴演化的影响分析[J].青岛大学学报(工程技术版),2019(4):6?10.
[15] 张耀文.基于压电陶瓷的桥梁伸缩缝疲劳损伤监测及波纹管密实性检测研究 [D].长沙:长沙理工大学,2019.
作者简介:陈姝雨(1984—),女,辽宁沈阳人,硕士研究生,主要从事电子电路方面的实验教学与实验室建设的研究工作。
