龙门往复式全自动智能洗车机设计与控制
2020-12-15刘奇奇李强赵璐
刘奇奇 李强 赵璐

摘 要:针对目前国内洗车行业存在洗车费时费力、洗车设备效率低、水资源浪费等一些弊端,设计了一种龙门往复式全自动智能洗车机,能够满足在无人值守情况下对不同车型清洗需求。介绍了全自动智能洗车机的整体结构、工作原理及控制方法。重点对洗车机运动控制系统进行硬件和软件设计,再利用总线型可编程逻辑控制器,结合三相异步电动机,通过电磁阀、交流继电器、超声波传感器、红外传感器、光电传感器及接近开关等诸多传感器,实现对洗车过程的精准控制,具有一定的市场推广价值。
关键词:全自动智能洗车机;龙门往复式 ;PLC控制
中图分类号:TH122 文献标识码:A 文章编号:1671-7988(2020)22-51-03
Abstract: In view of the current domestic car wash industry's disadvantages such as time-consuming and labor-intensive car wash, low efficiency of car wash equipment, waste of water resources, etc., a roll-over automatic intelligent car washer was designed to meet the cleaning needs of different models under unattended conditions. The overall structure, working principle and control method of the fully automatic intelligent car washing machine are introduced. Focus on the hardware and software design of the car wash machine motion control system, then use the bus-type programmable logic controller, combined with the three-phase asynchronous motor, through the solenoid valves, AC relaies, ultrasonic sensors, infrared sensors, photoelectric sensors and Proximity switches and many other sensors , To achieve precise control of the car wash process, has a certain market value.
Keywords: Fully automatic intelligent car washer; Roll-over; PLC control
CLC NO.: TH122 Document Code: A Article ID: 1671-7988(2020)22-51-03
引言
随着经济的迅速发展,汽车的保有量日益增多。汽车清洗作为汽车美容、汽车保养前的必要工序,有着广阔的应用前景。传统人工洗车存在费时费力、洗车效率低、浪费水资源等问题[1],市场上迫切需要自动化洗车设备来代替传统的人工洗车。目前国内自动洗车机一般有两种类型:一种是无接触式自动洗车机,利用水压进行清洗,洗车速度快,效果好,但强水压会对车身及一些电子设备造成损伤;另一种是接触式自动洗车机,利用毛刷定速清洗,存在占地面积大、稳定性差、故障率高等一些弊端[2]。本文设计的龙门往复式全自动智能洗车机[3],利用台达可编程逻辑控制器PLC (Programmable Logic Controller),根据毛刷组电流传感器反馈的刷组电流的大小,结合比例、积分和微分(Proportional、Integral and Derivative,简称PID)控制算法,对毛刷组运动系统实施精准控制,从而提高洗车效率和安全性,达到较好的洗车效果。
1 机械结构及工作原理
1.1 总体结构
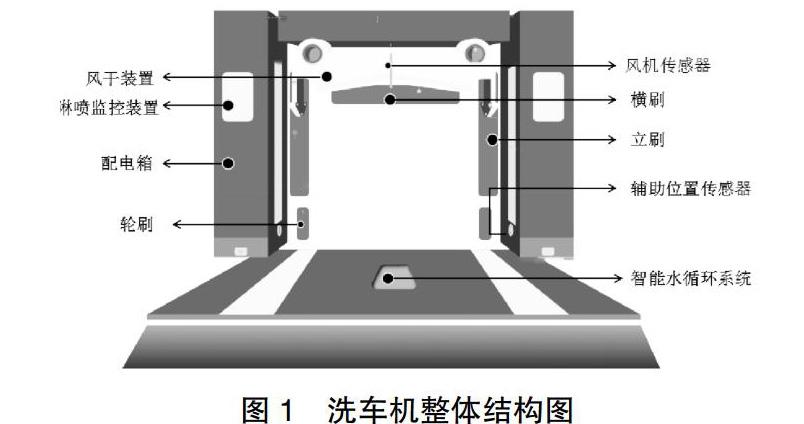
龙门往复式智能洗车机在清洗作業时,汽车需行驶到合适的位置固定不动,故洗车机要完成整车的清洗,需要控制各部分完成相对独立又连贯的工作。由于汽车的造型,大小有所差异,各部分在工作时所运行轨迹也各不相同,因此需要对洗车机各个执行运动机构分别进行控制,使得各个机构能够在时间和空间上相互配合,共同完成清洗任务[4]。龙门往复式全自动智能洗车机整体结构包括龙门架、配电箱、风机柜、行走导轨、横刷、立刷、轮刷和风干机构等,其整体结构如图1所示。
龙门往复式全自动智能洗车机控制系统主要包括洗车系统、风干系统、水循环系统、电气系统等,具体设备参数如表1所示。
1.2 工作过程
龙门往复式全自动智能洗车机采用多种类型传感器来确保洗车作业的安全性和智能性,主要有超声波测距传感器、光电传感器、电流传感器、接近开关等。实际作业中,PLC控制器会接受到传感器传递的信号,经中央处理器(Central Processing Unit简称CPU)处理后发送到电机驱动器,通过改变电机电流和转速的大小控制毛刷的运动。驾驶员把汽车行驶到洗车工位区域后,安装在龙门架上的光电传感器会检测到车头和车尾的位置,此时,淋喷系统自动打开,左右立刷旋转工作,龙门架沿导轨正向移动。
当左右立刷移动到车头一定程度时,龙门架停止行走,左右立刷开始向中心移动,对车头进行清洗。车头清洗结束后,左右立刷移动到汽车两侧,龙门架开始行走,左右立刷开始对车身两侧进行清洗。横刷通过超声波测距传感器测得与车身有一定的接触后开始旋转工作,并沿着车身上表面进行仿形清洗[5-7]。轮刷通过红外传感器检测到车轮位置时,轮刷伸出清洗车轮和车身两侧下表面。当清洗到车尾位置时,龙门架停止行走,左右立刷向中间移动清洗车尾。由于左右立刷在合拢时中间有部分会因毛刷干预而无法清洗到,在设计时采用过中心清洗的方式,即左右立刷在合拢到极限位置时同时向左移动一段距离后再向右移动一段距离,完成车头和车尾中间部位的清洗。正向清洗结束后,毛刷组开始反转,龙门架反向行驶,对汽车进行再一次的反向清洗。
清洗工作完成后,开始风干过程,风干系统打开,横风机通过超声波传感器和车身保持一定的安全距离,对车身进行仿形风干,运动轨迹类似于横刷的运动轨迹。风干过程结束后,洗车机复位到固定位置,驾驶员将汽车驶出,整个洗车过程结束。
2 控制系统的设计
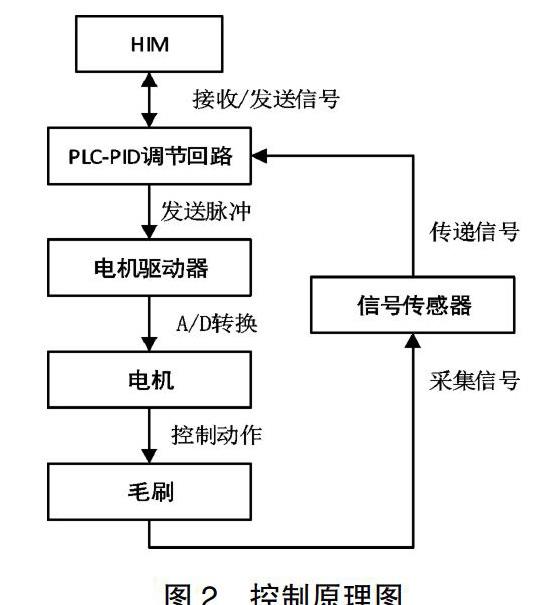
龙门往复式全自动智能洗车机采用仿形清洗的原理[8],每支毛刷都配有带有通信功能的电流传感器,可以检测到毛刷组中工作电机的负载电流,PLC控制器根据电流传感器反馈的毛刷组电机电流的变化,控制毛刷的上升或下降,前进或后退[9]。当毛刷和车身接触时,控制毛刷组旋转的负载电机的电流也会增大,PLC控制器对负载电流的变化进行8次采样后取其平均值,再将平均值与设定的正常工作电流值进行比较,若平均值小于设定值,则继续增加毛刷与车身之间的压力;若平均值大于设定值,则控制毛刷远离车身,减小毛刷与车身之间的压力;若平均值在设定的正常工作电流值范围内,则保持毛刷与车身之间的压力。以横刷为例,龙门往复式全自动智能洗车机横刷旋转电机的额定功率为0.37kW,空载电流为0.6A,设定的正常负载电流值范围为0.9-1.1A。为了完成安全、稳定、高效的洗车作业,需要合理地调节毛刷组中各个电机负载电流的大小,避免设备和车辆受到损坏。本文对洗车机运动系统的电流误差调节采用PID控制方案,控制原理图如图2所示。通过PID控制参数的调节,加快了系统响应时间,几乎可以消除静态误差,有效控制了电机负载电流的大小,使毛刷和车身保持在正常的压力范围内,保证洗车作业的安全进行。
2.1 硬件设计
龙门往复式洗车机控制系统通过PLC主从控制方式,将所有的被控制设备有机组合在一起进行实时控制,PLC硬件接线如图3所示。洗车机选用型号为DVP60ES2的台达PLC控制器进行采集以及检测信号的处理工作,人机交互界面(Human Machine Interface,简称HMI)实现对PLC控制器的整体控制并执行PLC程序,PLC控制器则通过控制各个不同电磁阀,交流继电器的断开与闭合动作,实现对各个电机的控制。HMI通讯端口通过RS485转接线与PLC之间采用基于MODBUS-RTU的通讯协议进行通讯。上机调试过程:波特率设为9600bps,数据位数为8,停止位数为1,校验为无,程序中EH2的主机站号为3,故PLC默认站号也要设置为3,否则会出现通讯错误。其他一些端口选项设置成默认即可。
2.2 软件设计
PLC作为龙门往复式全自动智能洗车机的核心控制器,软件的设计采用梯形图语言进行编程[10],梯形图具有逻辑清晰、简单易懂等优点。PLC通过接收到各类传感器传递的信号,经CPU处理、PID调节误差后发送执行命令到映射区,从而控制外围设备的动作。主要实现对龙门架的运动、毛刷的运动、电动机的启停、风干系统、淋喷系统的控制等。启动流程如图4所示,整个过程循环进行。
3 结束语
针对全自动智能洗车机的发展现状及实际的控制需求,设计出了一款龙门往复式全自动智能洗车机,分析了洗车机的整体结构及工作过程,给出了控制系统硬件的接线及软件的实现方案,将PLC控制器与PID算法相结合,利用仿形清洗技术,在保证洗车机安全性、可靠性的前提下,大大提高了洗车机的工作效率,为龙门往复式全自動智能洗车机的推广及进一步开发奠定了基础。
参考文献
[1] 王昊.二自由度机械臂无接触式洗车机控制系统研究[D].合肥:合肥工业大学,2018.
[2] 储昭碧,王昊,胡永新.洗车机二连杆机械臂定位控制策略及实现[J].制造业自动化,2017,39(08):142-145.
[3] 陈韦松,谢永智.龙门式自动洗车机设计[J].机电工程技术,2018, 47(01):79-80+118.
[4] 韩晓成.智能洗车控制系统设计与研究[D].沈阳:东北大学,2011.
[5] 方建军.光机电一体化设计[M].北京:化学工业出版社,2003.
[6] 徐进,石小龙.全自动小型龙门式洗车机系统设计[J].机械研究与应用,2018,31(02):91-92.
[7] 李丽英,黄季平.自动洗车机可编程控制器的控制的控制系统[J].中国农业大学学报,1996(4):87-92.
[8] 田一凡.仿形技术在列车自动清洗机中的运用[J].科技展望,2016, 26(07):166.
[9] 徐汝鑑,葛燕萍.龙门往复式全自动洗车机仿形刷洗系统设计[J].机械制造与自动化,2012,41(04):35-38.
[10] 台达电子工业股份有限公司.台达DVP-PLC编程技巧:WPLSoft软件篇[M].北京:中国电力出版社,2012.
