基于动态减重的下肢康复机器人设计与控制策略研究
2020-12-12梁煜欣严辉李军
梁煜欣 严辉 李军
(1.台州学院航空工程学院,浙江台州 318000;2.台州方圆质检有限公司,浙江台州 318000)
随着经济社会的快速发展,人口老龄化趋势日益严峻。因脑卒中、中风、脊椎损伤等疾病导致下肢运动困难人数也呈增加的趋势[1,2],给社会和家庭带来沉重负担。70%以上的患者通过早期介入康复训练可恢复步行能力。传统的康复治疗,需要治疗师和患者家属专门化指导进行康复训练,对治疗师的技术水平也有较高的要求,极大地加重了陪护者的体力支出和患者的经济支出,降低了患者和陪护者的生活质量[3-5]。为解决以上问题,为患者提供科学合理的康复治疗,下肢康复机器人应运而生[3-5]。瑞士Hocoma公司研制的Lokomat 步行康复机器人在业内具有广泛知名度[6],由外骨骼式助行机械腿及跑台和悬吊减重装置两部分组成,帮助患者完成矢状面内的往复步态训练。该机器人是首台以减轻下肢负重进行下肢康复治疗的康复产品,经过不断改进,已在许多康复中心投入使用。此外,瑞士Yves Allemand等人研制了 “Walk Trainer”下肢康复机器人[7]。我国清华大学、上海大学在该领域内也有一定研究。目前,我国自主研发的康复机器人很少实现产品化进行大规模商用,高技术含量的产品均依赖进口,且售价昂贵,大部分患者难以承受,因此,研发一款具有自主知识产权、实用高效的康复机器人具有深远意义。
该研究设计基于动态减重的下肢康复机器人,工作原理是通过在动态减重单元的恒减重基础上,依靠下肢辅助行走单元帮助患者进行训练,对损伤的运动神经进行全方位刺激。康复机器人具有欠驱动结构、患者自主控制、鲁棒性好的优点,适合医院和家庭使用,能显著提高患者的自主康复训练积极性及治疗效果。
1 机器人结构设计
1.1 人体下肢运动机理分析
为了设计出科学合理、具有拟人化的康复机器人[8],首先要分析正常人体下肢的骨骼、肌肉和行走机制,在此基础上进行结构设计和步态控制。正常人步态周期相位图如图1所示[9]。
1.2 机器人的机械结构设计
机器人在工作空间上由两大驱动单元组成,分别为:动态减重支撑单元和下肢辅助行走单元,机器人整体呈对称分布关系,机器人样机如图2所示。

图1 正常人步态周期相位图

图2 动态减重下肢康复机器人
运动单元示意图如图3所示。考虑到人体下肢的运动空间在矢状面、额状面均有分布。与目前设计的大部分康复机器人不同的是,该设计为保证最大的拟人化要求,将下肢辅助行走部分设计为欠驱动形式,可以使其具备非常好的个体适应性,完成下肢空间多自由度的运动。

图3 运动单元示意图
医学上认为单腿站立时,患侧下肢能够负重站直为宜,当减重为人体重量的20%或 40%时,步行耗氧量随减重量的增加而减少;当减重量达体重的 60%时,不仅各项步行参数发生明显改变,而且步行耗氧量也有所增加[10]。人在步行过程中,重心呈正弦变化,因此,需要设计动态减重装置提供给人向上的恒减重力。动态减重装置通过反馈回主控板的力信号与设定目标进行对比,控制丝杠螺母升降台进行上下移动。
下肢辅助行走欠驱动结构如图4所示。由直流减速电机,同步带滑台与其他机构组成,该结构分别布置于人体两侧的髋关节和膝关节处,减速电机带动同步带滑台上的滑块进行直线运动,与滑块形成串联的腿部固定板与大腿、小腿中间位置固连,其中图4中所示的圆柱副、转动副和直线导轨是人机在下肢拥有6自由度,将电机的旋转驱动转化为肢体的欠驱动,既保证了患者下肢的个体适应性,满足不同身高、不同体重的患者使用的柔顺性,又保证了整体结构的紧凑性和实用性,使控制更加灵活、高效。

图4 单侧欠驱动结构图
2 人机耦合控制策略
经分析,动态减重下肢康复机器人与患者之间的协调控制主要是动态减重支撑单元和下肢辅助行走单元之间的协调控制,康复训练的科学合理性取决于控制策略。
2.1 康复过程分析
康复过程分析是整体控制策略的核心,决定机器人的控制策略。因此,有必要对患者使用设备康复的流程进行分析,以常规康复(辅助患者下床,并进行肢体康复)为例,具体如下:
(1)患者坐在床边,穿戴好悬吊服和腿部固环,在控制上输入体重和减重比例。
(2)按下控制器的“起立”键,丝杆螺母升降台升起,依靠支撑梁和悬吊服将患者助力站立。
(3)“S拉力传感器”检测到设定的体重的60%,升降台下降,当“S拉力传感器”检测到0N时,完成回零操作,准备进行下肢步行康复。
(4)按下控制器的“康复模式1”,进行常规康复,拨动PS2摇杆手柄,进行直线向前行走和转弯行走及加减速的控制。
(5)训练结束,进行归零操作,患者完成一周期康复。
2.2 动态减重支撑机构动力学建模及控制
减重步行康复训练时,患者下肢机理退化,无法承载自身的重量、难以保持平衡,该设计利用减重支撑系统为患者卸载自重,帮助患者保持身体平衡进行行走训练。需要对减重支撑单元进行原理分析和动力学建模。动态减重机构简图如图5所示。

图5 动态减重机构简图
由于人体在运动过程中,重心为正弦变化,运动轨迹数学模型可表述为:

其中T为步态周期,t为时间(s),患者和支撑梁通过悬吊服和S型拉力传感器串联,人机接触可用质量-弹簧-阻尼系统(m-c-k)描述,则减重力:

其中me为人体期望减重力质量;k为人机接触的刚度系数;b为人机接触的阻尼系数;y0为螺母初始零点的位置。
升降台采用丝杠螺母驱动方式,升降台丝杠传动动力学方程为:

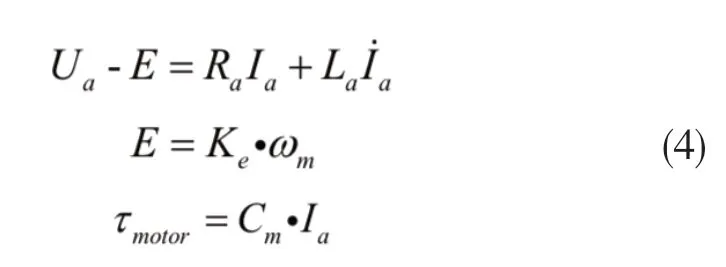
根据工作原理,建立直流电机的数学模型[11]。
最终,减重系统的动力学方程表示为:

式中Ph为丝杠导程;n1为丝杠进给正效率;Ua为电机两端电压;E为电机反动势;Ra为电枢回路总电阻;La为电枢回路总电感;Ia是电枢电流;Ke为反电势系数;wm为电机轴的角速度;Jm为电机电枢的转动惯量;Kb为等效阻尼系数;Cm为电机转矩数。
在步态康复训练过程中,动态减重机构根据S型拉力传感器回传到主控芯片的重心竖直方向的拉力模拟量,与设定减重力进行对比,采用离散型的pid控制算法。

2.3 下肢辅助行走机构运动学建模及控制
下肢辅助行走单元主要是由四支同步带滑台、直流电机和绝对值编码器组成,四个滑块的运动轨迹规划对决定步态参数具有决定性作用,因此需要对下肢-滑块建立运动学模型,下肢人机耦合模型如图6所示。

图6 单侧下肢-滑块耦合模型
滑块D和滑块E的运动轨迹规划决定步态控制策略,建立单侧下肢-滑块耦合模型运动学[12]方程:

滑块G在杆BC上表现为移动副,有1个自由度,所以LBE杆长时变,对LBE建立运动学关系式:

其中,根据建立的人-机模型,人体下肢长度LAB=457mm;机器人设计参数h1=205mm,h2=600mm。
由此构建出滑杆LBE与已知髋、膝关节角度之间的关系式。髋关节角度α和膝关节角度β的数据以仿真试验CGA (clinical gait analysis)数据[13]作为驱动进行分析,正常步态下两周期的髋关节角度α和膝关节角度β与相位关系如图7所示。

图7 正常步态髋、膝关节角度变化曲线
将其直行步态带入运动学方程(6)中,最后将求得的数据导入到Matlab软件进行计算,得到理论计算两个周期下的滑块D和滑块E的运动轨迹如图8所示。

图8 计算求解得滑块D和滑块E的运动轨迹
运动模式通过Labview作为上位机与主控芯片进行串口通信选择功能,辅助行走训练中的运动路径通过PS2 joystick摇杆模块进行前后左后、左转右转的差动运动,即通过读取摇杆模块的模拟量改变驱动函数的幅值条件,实现加减速、换向等功能。
3 样机分析及实验研究
搭建样机有两个目的,一是验证控制策略中关节驱动函数在实际人机协作过程中的效果;二是验证所设计的机器人是否符合人体运动机理,是否存在相互干涉,为后续的改进提供数据指导。该项目分别搭建了虚拟样机和实物样机,验证了理论计算的正确性。
该研究将在Solidworks中建立人机协作三维模型导入到Adams中,利用Adams运动仿真模软件[14]对该康复机器人进行人机耦合仿真分析,假人模型以身高为175cm的为例。图9为在Adams中设置的连接与约束。

图9 Adams中设置的连接与约束
在Adams软件中,将CGA驱动数据以采用CUBSPL样条函数驱动,在Adams中需要编写对应关节驱动函数,具体关节驱动函数如表1所示。

表1 关节驱动函数
机器人模型中各零件的性能参数根据物理样机实际材料设置,人体下肢各肢体的参数根据人体惯性参数设置。滑块XD和滑块XE决定了下肢欠驱动式运动的合理性和柔顺性,对康复效果起决定性作用。以机器人左侧驱动关节为例,仿真后输出滑块XD和XE的运动轨迹,如图10所示。
根据图10可以看出,仿真得出的XD和XE两滑块的运动轨迹流畅顺滑,两滑块直线位移最大不超过350mm,小于设计同步带滑台500mm有效位移的设计量,且无任何干涉,验证了设计尺寸的合理性。

图10 XD、XE的仿真运动轨迹曲线
XD、XE的仿真位移速度曲线如图11所示,分析其位移速度,均小于20mm/s,符合所选型的直流电机型号和同步带参数,并为制作实物样机提供数据支持。

图11 XD、XE的仿真位移速度曲线
XD、XE的实验运动轨迹曲线如图12所示,实验平台通过LabView搭建康复系统的上位机[15],通过蓝牙串口通信与STM32ZET6单片机进行数据传输控制,欧姆龙E6B2编码器联结在同步带滑台输出轴上,记录并计算出滑块的实时位移情况,将其记录下来,并与仿真数据进行比较分析。
图12可以看到,驱动髋关节、膝关节运动的滑块XD和XE在仿真环境下和实验测试环境下具有高拟合度、相似性,滑块XD的实验运动轨迹均略高于仿真轨迹,滑块XE的实验运动轨迹分布于仿真轨迹上下,但与仿真结果成正比例,分析误差主要原因为机械损耗和人体运动的差异性。符合实验预期,验证了理论计算和控制策略的正确性。

图12 XD、XE的实验运动轨迹曲线
4 讨论
针对偏瘫患者的增多和康复成本的日益提高,该研究提出了基于动态减重的下肢康复机器人。分析目前各科研院所、高校在该领域关键技术的研究进展[16],大多以穿戴式的外骨骼康复机器人、多种传动助力方式、脑机结合控制机器人为主,但是,目前大部分研究成果仍然停留在实验层面。总结原因,主要由高研发成本引起的高售价,刚性连杆与多自由度的人体易导致人机系统不稳定,穿戴舒适感性不佳导致的。
该文设计的康复机器人具有辅助患者在减重中步行、在步行中康复,在真实的路况环境下减重辅助行走更有利于患者康复,根据患者的不同步行能力提供相应的行走训练策略,帮助脑卒中患者重新获得步行功能。搭建虚拟样机进行仿真分析,并得到了实验验证,实验结果表明此下肢康复机器人符合设计预期,并为以后的临床研究提供了重要参考依据。在下一阶段,该研究将继续完善控制系统,引入模糊自适应阻抗控制,开展基于脑电和肌电的混合脑机接口的研究,提高康复机器人的人机协同性,从而进一步来提高康复效率、完善训练功能,以实现患者更好的康复训练。
