BDS/INS紧组合三频动对动模糊度解算方法*
2020-12-07赵修斌朱楚江庞春雷高玉洁
赵修斌,朱楚江,庞春雷,张 良,高玉洁
(1. 空军工程大学 信息与导航学院, 陕西 西安 710077; 2. 中国人民解放军95140部队, 广东 惠州 516211)
基于载波相位差分的动对动相对定位技术在飞机精密编队飞行、空中加油、空间飞行器交会对接和舰载机着舰等领域具有重要应用,其关键在于动对动条件下整周模糊度的快速解算[1-3]。目前,我国北斗卫星导航系统正在迅猛发展,已经可以在B1、B2、B3三个频点上播发卫星导航信号,以提供更精确的导航定位服务。三频信号能够提供额外频点的载波相位观测值,从而为整周模糊度的解算提供了极大便利[4-5]。针对三频整周模糊度解法,国内外学者已经进行了大量研究,其中最具代表性的是三频整周模糊度解法(Three Carrier Ambiguity Resolution, TCAR)和级联模糊度算法(Cascading Integer Resolution, CIR)[6-7]。在此基础上,姚一飞等通过引入电离层延迟先验信息,将电离层延迟作为未知参数与位置参数以及模糊度参数一并求解,提高了单历元模糊度固定成功率[8]。梁宵等针对TCAR和CIR在模糊度解算性能上弱于最小二乘降相关平差法(Least-squares AMBiguity Decorrelation Adjustment, LAMBDA)的问题,提出了一种宽窄巷结合的LAMBDA整周模糊度解法,并获得了毫米级的相对定位精度[9]。王官龙等提出了一种北斗三频无故障导航算法,并将其运用于海基精密进近与着陆系统(Joint Precision Approach and Landing System, JPALS)中,能够在短时间内实现模糊度的正确固定[10]。
TCAR主要可以分为几何(Geometry-Based,GB)和无几何(Geometry-Free,GF)两种模式,在短基线条件下,电离层延迟误差通过双差几乎完全消除,观测噪声和多路径误差成为主要误差源[11]。在动对动情形下,伪距观测噪声过大将会导致模糊度解算不可靠。因此,伪距测量精度是影响模糊度固定的决定性因素。
惯性/卫星组合导航系统能够持续提供高精度位置输出,其误差不随时间累积,且其工作过程不受外界测量环境影响,能够有效避免观测噪声和多路径误差的影响[12]。肖凯等首次提出了基于GNSS/INS紧组合的三频整周模糊度解法,获得了高精度的组合导航解[13],但是该算法的核心是实现组合导航,而不是进行动态相对定位。本文在BDS/INS紧组合的基础上,提出了一种适用于动对动情形的三频整周模糊度解算方法。
1 算法设计
本文旨在研究动对动条件下的整周模糊度解算方法,无固定基准站作为参考,故在两个运载体上各自配备一套组合导航系统,两套系统独立工作。传统TCAR第一步采用伪距观测值来估算超宽巷模糊度,但由于动对动条件下伪距测量值容易产生粗差或者多路径效应,导致其误差较大,从而使得超宽巷模糊度的解算可靠性下降。因此本文采用BDS/INS紧组合的实时位置输出代替伪距观测值,在GF和GB两种模式下分别进行组合模糊度解算,并恢复初始模糊度。具体算法框图如图1所示。

图1 三频整周模糊度解算框图Fig.1 Triple-frequency integer ambiguity calculating block diagram
2 BDS/INS紧组合模型
BDS/INS紧组合模型采用伪距组合方式[14]。
误差状态方程可以表示为:

(1)

观测方程由BDS测量得到的伪距与INS推算的伪距作差得到
(2)

3 三频整周模糊度解算
在选取组合模糊度时首先要求组合系数是整数,以保持模糊度的整数特性,此外还需尽量满足组合波长长、电离层延迟小和噪声放大因子小的要求。在短基线条件下,电离层延迟误差可以忽略不计,此时主要考虑组合波长长、噪声放大因子小的组合。根据文献[11]的分析,本文选取(0,1,-1)、(1,0,-1)和(1,0,0)依次作为超宽巷(Extra Wide Lane, EWL)、宽巷(Wide Lane, WL)和窄巷(Narrow Lane, NL)的组合系数。
3.1 geometry-free模式
传统无几何模式下的TCAR算法利用伪距双差观测值来估计EWL整周模糊度。短基线条件下,组合系数为(0,1,-1)的双差整周模糊度通过下式直接取整得到。
ΔN(0,1,-1)=Δ
(3)
ΔN(1,0,-1)=Δφ(1,0,-1)-
(4)
ΔN(1,0,0)=Δφ(1,0,0)-
(5)
当以上三个组合整周模糊度被依次确定后,另外两个双差原始整周模糊度ΔN(0,1,0)和ΔN(0,0,1)也可以被正确求解。
根据误差传播理论,假设载波相位观测噪声与伪距观测噪声互不相关[15],则式(3)~(5)中由观测噪声引起的组合整周模糊度误差均方差分别为:
(6)
(7)
(8)
由式(6)~(8)易知,EWL模糊度解算同时受到载波相位噪声和伪距噪声的影响,而WL和NL模糊度解算只受载波相位噪声的影响。由于载波相位测量精度与多路径效应以及接收机灵敏度等因素有关,很难通过有效手段对其进行显著提高,因此本文着重分析伪距误差对模糊度解算的影响。假设北斗非差载波相位观测值噪声标准差为0.02周,则双差载波相位观测值噪声标准差为0.04周。对于式(3)来说,利用四舍五入取整法成功解算EWL整周模糊度的前提条件为:
|dΔN(0,1,-1)|<0.5
(9)
根据“3σ”原则,按照99.74%置信区间,取
(10)
则
σ<0.814
(11)
σρ<0.407
(12)
即要求动对动条件下的伪距观测值均方误差不超过0.407 m。而在复杂观测条件下伪距测量误差的增大极有可能导致EWL整周模糊度固定错误。故本文采用BDS/INS紧组合对无几何模式下的TCAR算法进行改进。利用BDS/INS紧组合伪距更新得到的接收机实时高精度位置坐标推算接收机到卫星的几何距离,并用其代替伪距观测值,从而式(3)改写为:
(13)
3.2 geometry-based模式
几何模式下的TCAR算法与无几何模式下的区别在于,逐级解算模糊度时不再采用直接取整的无几何模型,而是采用几何模型来求解。其具体步骤如下。
步骤1:采用最小二乘法解算EWL的模糊度浮点解
(14)
步骤2:采用最小二乘法解算WL的模糊度浮点解
(15)
其中
Δφ(0,1,-1)-ΔN(0,1,-1))
(16)
同样地,在得到WL的模糊度浮点解及其协方差矩阵后,利用LAMBDA算法即可得到WL模糊度固定解。
步骤3:采用最小二乘法解算NL的模糊度浮点解
(17)
其中:
Δφ(1,0,-1)-ΔN(1,0,-1))
(18)
得到NL的模糊度浮点解及其协方差矩阵后,利用LAMBDA算法即可得到NL模糊度固定解,最后还原初始模糊度。
考虑到伪距观测值噪声的影响,本文采用改进的GB-TCAR算法,在解算EWL模糊度浮点解时,将双差伪距观测值用紧组合系统推出的双差几何距离Δρc代替,则式(14)改为:
(19)
其余步骤保持不变。
4 算例分析
本文的实验数据通过仿真产生。为了验证动对动条件下的算法性能,按如下步骤进行实验数据的仿真。
步骤1:仿真产生两段飞机编队飞行轨迹,总时长为1200 s,两段轨迹的初始位置均为东经108.54°、北纬34.15°,高度相差100 m,且在飞行过程中始终保持100 m不变。因此,在飞行过程中两架飞机之间形成的基线长度始终为100 m。同时产生两段相应的惯导跟踪轨迹,两个惯导的精度水平一致,陀螺仪漂移误差设置为0.01 (°)/h,加速度计零偏误差设置为10μg。
步骤2:利用卫星星座模拟器产生一段时间的卫星星历数据,从而得到该段时间内两架飞机的伪距观测值和载波相位观测值。
步骤3:利用前文介绍的BDS/INS紧组合模型对步骤1和步骤2中的仿真惯导数据和伪距观测数据进行组合处理,得到组合位置输出值。
4.1 BDS/INS紧组合模型性能仿真分析
对BDS/INS紧组合模型在不同伪距噪声水平下的导航定位性能进行仿真,其输出的位置误差如图2所示,位置误差均方差如表1所示。

(a) x方向误差(a) Errors in x direction

(b) y方向误差(b) Errors in y direction
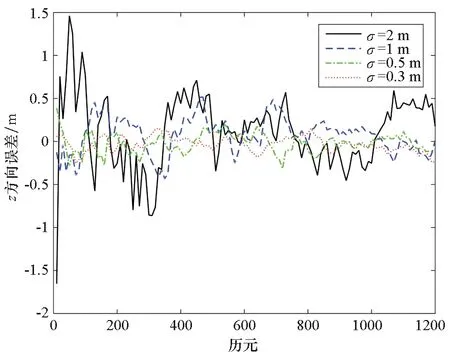
(c) z方向误差(c) Errors in z direction图2 BDS/INS紧组合模型位置误差Fig.2 BDS/INS tightly-coupled model positioning error

表1 BDS/INS紧组合模型位置误差均方差
从图2和表1可以看出,当伪距噪声标准差在2 m以内时,该紧组合模型输出的x、y、z三个方向的位置精度能够达到分米级甚至厘米级,利用该位置推算出的几何距离均方误差不超过0.628 2 m,其精度相比于原始伪距观测值提升了60%以上,因而能够被用来替代伪距观测值进行整周模糊度的解算。
4.2 三频整周模糊度解算性能仿真分析
为了验证本文所提算法的模糊度解算性能,分别采用GF、GB、BDS/INS紧组合辅助的无几何模式(TC+GF)以及BDS/INS紧组合辅助的几何模式(TC+GB)在相同载波相位噪声水平(设为0.02周)、不同伪距噪声水平条件下对三频整周模糊度进行逐级解算,并对其模糊度解算成功率进行比较分析。为了使所得结论更加具有普遍性和说服力,对每个实验程序均重复运行1000次,取其算术平均值作为实验结果,如表2所示。
从表2可以看出:GB模式下的整周模糊度解算成功率高于GF模式,这是由于几何模型充分运用了所有可见卫星的观测信息,有效提高了模糊度浮点解精度,并采用了LAMBDA算法对模糊度浮点解进行了搜索和固定;在伪距观测噪声标准差为1 m以上时,GF模式下的模糊度解算成功率不足25%,GB模式下的模糊度解算成功率不足80%,而加入BDS/INS紧组合辅助后,各级模糊度解算成功率均在99%以上,模糊度解算成功率显著提高。此外,在BDS/INS紧组合辅助的GB模式下,当伪距观测噪声标准差不超过1 m时,各级模糊度解算成功率均达到了100%。GF模式下超宽巷、宽巷和窄巷模糊度解算成功率逐渐降低,这是由于下一级模糊度解算与上一级有关,并且下一级模糊度解算时加入了新的观测噪声,而GB模式使用了LAMBDA算法,一定程度上削弱了观测噪声对于下一级模糊度解算的影响,使得三者的解算成功率基本相当。
在伪距观测噪声标准差为1 m时,利用BDS/INS紧组合辅助的GB模式进行两个运载体之间的基线矢量解算,基线长度及其误差如图3所示,基线矢量x、y、z方向误差如图4所示。从图中可以看出,基线长度误差均在5 cm以内,基线矢量在x、y、z方向上的误差也均在5 cm以内。这表明该方法能够实现厘米级的动对动相对定位。

图3 基线长度及其误差Fig.3 Baseline length and error

表2 三频整周模糊度解算成功率
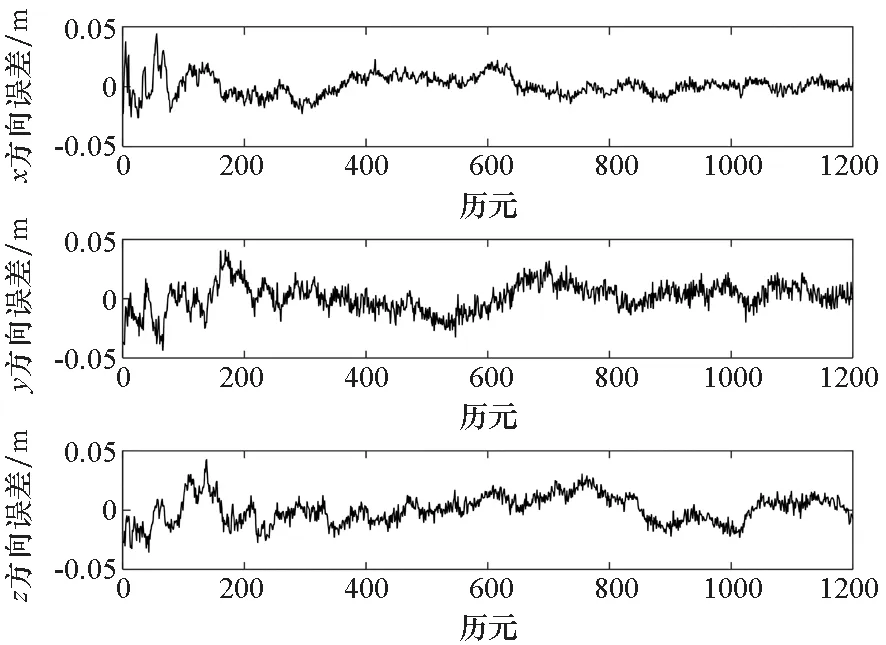
图4 基线矢量x、y、z方向误差Fig.4 Baseline vector errors in x、y and z directions
5 结论
本文提出了一种BDS/INS紧组合辅助的动对动三频整周模糊度解算方法,通过紧组合输出的高精度实时位置坐标推算出双差几何距离,并用其代替原始TCAR算法中的双差伪距观测值,分别在GF和GB两种模式下分析其模糊度解算性能。仿真结果表明,在BDS/INS紧组合的辅助下,三频整周模糊度的解算成功率显著提高,当伪距观测噪声标准差不超过2 m时,两种模式下的模糊度解算成功率均在99%以上。由于在解算模糊度之前首先需要对BDS和INS的数据进行紧组合处理,模糊度解算的实时性有待进一步研究。
