基于MAVLink消息自定义的无人机电力巡线中继通信方案
2020-11-30关家华凌忠标孔祥轩陈君宇林晓璇
关家华,凌忠标,孔祥轩,陈君宇,林晓璇
(广东电网有限责任公司 佛山供电局,广东 佛山 530006)
0 引言
无人机具有灵活性高、成本低及可拓性强等优点,被广泛应用于电力设施巡检等作业[1];但目前国内无人机巡检中还存在通信能力低、地形影响大、偏远地区网络覆盖不完善等问题[2]。
无人机通信方案有多种选择,如采用3DR Radio数传模块,但其通信距离不足[3];也有采用4G中继通信方式,但其通信覆盖度不够且通信高度受限[4];军用无人机常选用卫星通信方式,但是其成本高,且民用卫星资源较少[5]。无人机通信协议也有多种选择,如采用整体性能最佳的链路优先的路由选择协议,可实现云端地面控制系统对无人机的远距离通信,但需要高空长航时无人机作为中继基站[6];也可采用时分双工(time division duplex,TDD)通信协议实现基于数据电台的单载波全双工测控方式,但其通信链路搭建复杂、时效性弱[7];MAVLink(micro air vehicle link)通信协议在无人机领域得到了较为广泛的运用[8],基于MAVLink协议设计的植保无人机地面监测终端可实现无人机作业过程中位置、飞行姿态及系统状态等数据的解析及上传[9],但其无法较好地实现无人机飞行过程中数据通信和中继通信。
本文提出一种基于MAVLink协议、消息自定义的无人机电力巡线通信系统方案,其采用高性能无线型数传模块,并与MAVLink v2.0通信协议相结合,能够较好地实现无人机飞行过程中的数据通信和中继通信。
1 系统整体构成
本文设计的无人机电力巡线通信系统由无人机群、中继通信基站和云端地面控制系统(cloud ground control system,CGCS)组成,如图1所示;搭载了无线数传模块的无人机和中继通信基站是本系统主要组成部分。地面中继通信基站采用带状分布,可通过4G蜂窝或宽带网络等方式与云端地面控制系统建立通信,将无人机的数据流传送到云端地面控制系统后进行数据解析并处理,之后存入服务器中。服务器作为空中管理资料库,可提高空中无人机飞行空域管理的安全性,协调无人机之间的飞行调配。当无人机需要在稍超出地面中继基站信号范围的地方作业时,可通过另一架无人机作为空中中继基站来传输通信指令,扩大了无人机通信系统的通信范围,这是对地面中继基站的一种补充通信方式。

图1 无人机电力巡线通信系统整体构成Fig. 1 Integral composition of the UAV power line patrol communication system
2 系统通信方案
系统中,无人机在空中通过RFD900X通信模块与中继基站通信,中继基站再通过4G或以太网转发到云端地面控制系统,系统通信链路采用MAVLink通信协议实现通信。
2.1 MAVLink协议
MAVLink是一种非常轻量级的通信协议,在本系统中用于无人机通过地面中继基站与云端地面控制系统的通信,以及无人机之间的通信。Lorenz Meier 于 2009年首次发布该协议,随后分别于2013 年和2017 年发布了 MAVLink v1.0和MAVLink v2.0。MAVLink提供了检测数据包的丢失损坏和数据包身份验证的方法。MAVLink中的common.xml定义了大多数地面控制系统和自动驾驶仪通信的参考消息,也可自行拓展添加消息集至XML文件。
本系统采用MAVLink v2.0协议(表1),其包含了长度为1字节的发射端系统ID与长度为1字节的接收端部件ID,用于区分通信网络上的ID,通过解算消息流可获取发送端与接收端信息;拥有3字节的消息包ID用于数据解码以获取消息对象,可获取数据包的自定义信息;MAVLink数据包用于在MAVLink网络上标明系统和组件的ID、飞机类型、飞行堆栈、组件类型和飞行模式等通信信息,并用于广播系统的标识及通信主体的类型和相关属性的分辨。通过MAVLink v2.0协议,系统实现了无人机飞行过程中无人机ID编号、姿态信息、航向、经纬度、水平速度、垂直速度及无线电信号强度等数据的解析及通信。

表1 MAVLink v2.0数据包格式Tab. 1 MAVLink v2.0 packet format
2.2 无人机回传数据信息
在无人机的飞控端设置MAVLink协议栈软件,用于抓取无人机的实时数据,并用MAVLink协议封包成二进制数据包后通过无线设备传至中继通信基站中。通信基站通过对协议解包,获取无人机的ID编号。若消息无误,数据包将通过TCP/IP协议转发至CGCS[10];若消息有误或消息中ID不在CGCS备案ID中,就忽略该消息不做处理。在CGCS处理完无人机的MAVLink消息后,如要做出相应的控制,则将封包后的MAVLink消息通过TCP/IP协议传输到带有相应无人机ID编号的中继通信基站。CGCS的MAVLink数据包直接通过中继通信基站进行无线电转发至无人机端。本方案是串式通信,相比于三方通信,串式通信系统在通信网络上的指向会更清晰。图2为无人机群、中继通信基站和云端地面控制系统的串式通信框架。

图2 系统通信协议栈构成Fig. 2 System communication protocol stack
无人机群与中继通信基站使用RFD900X数传模块连接,数传通信采用无线电的广播通信。对于无人机群的通信,要配合相应的无人机ID编号,以防止无人机间的通信干扰问题。无人机发送MAVLink消息时,会将自身的ID编号装进MAVLink消息的系统ID帧中。中继通信基站解算得出MAVLink消息来源于哪一台无人机并记录在中继通信基站无人机群标签中,用于划分无人机群归属,同时将无人机群标签定时上传到CGCS中;MAVLink解包协议分析其目标编号部件ID是否为CGCS编号,若无误,将消息转发至CGCS;若有误,则视为系统外的消息,不进行转发。云端地面控制软件也会根据各个中继基站上传的无人机群ID标签将相应的控制消息命令传输到相应的中继通信基站进行无线电广播通信。若无人机群ID标签有缺失,则针对该失联无人机进行失联呼叫通信。
2.3 RFD900X无线电数传模块
远距离信息通信常用4G通信技术,其具有通信成本低、距离远、信号传输快速便捷等优势[11];但4G通信技术受高度限制,且4G网络不能完全覆盖山区、森林等地区。普通无人机通信常用3DR Radio数传模块,该模块通信稳定,适合作为大多数无人机通信;但该模块功率低、通信距离不足。
由于无人机在电力巡线作业中容易遇到信号强度低于无线电正常接收所需最小信噪比的无线弱场区域,如高山、树林、大型建筑旁等,这些地形附近的电磁波会被阻挡、反射,信号收集会遇到障碍,存在用户信息通信不稳定、信号差等情况[12],因此,需要采用接收效果好、功率大、滤波效果好的硬件——无线电通信模块。本方案选择RFD900X型无线电数传模块,其为美国RF Micro Devices公司研发的一款高性能、低功耗、可调节发射频率的通信模块,最大功率为1 W,采用增益大于20 dB的低噪声放大器,室外直线通信距离可达40 km;其发射电路采用增益大于20 dB的低噪声放大器设计并加入低通滤波单元,支持本地电台AT命令配置和远程电台的RT命令配置并具有双天线接口,天线分集及差异化天线配置使其可很好地完成系统通信功能。
表2给出了各通信技术性能对比,相比而言,RFD900X无线电数传模块在通信距离、信号强度和滤波能力上都有优势。

表2 各通信技术性能对比Tab. 2 Performance comparison of communication technologies
此外,RFD900X无线电数传模块的软件特性有助于保障传输的安全性及可靠性,主要包括:跳频扩频的串行连接,AT命令配置本地电台,RT命令配置远程电台,可在设备间遵循MAVLink协议将无线电通信状态(本地数传信号强度、远程数传信号强度、本地噪声及远程噪声等系数)相互通信,并可根据数传温度软件调节供电电流的占空比来避免模块过热。
3 系统中继方案
本系统采用中继通信的方法来增加通信范围,主要为两种中继方式:地面中继基站通信及无人机空中中继,其中无人机空中中继作为地面中继基站通信在距离不足时的补充。
3.1 地面中继基站设置
电力线路以线状长线路为主,本方案中采用了带状中继基站设置的方案以节省中继基站设置的成本,如图3所示。本方案中,RFD900X型无线数传模块的室外通信距离为40 km,但考虑到室外无线弱场区域以及功率衰减等因素影响,在高压输送线路中每隔30 km设置一个中继通信基站,且由于无人机巡线飞行高度远小于30 km,因此可忽略高度对传输距离的影响,从而保证了无人机在作业过程中可一直处于良好信号收发状态。

图3 带状基站设置图Fig. 3 Band base station setup diagram
3.2 无人机中继
本系统采用了长传输距离的RFD900X型数传模块,地面中继基站信号覆盖半径达40 km,可满足无人机电力巡线中的绝大部分任务;但当无人机需要在信号覆盖范围以外的区域执行特殊任务时,其控制命令和无人机信息无法送达中继基站,影响了系统的执行效率。
无人机中继是采用空中无人机作为中继基站。地面中继基站将通信指令通过空中的无人机作为中继基站传输至目标无人机,从而完成指令传输工作,可克服距离上的障碍,达到执行更多任务的目的。本系统中无人机搭载的RFD900X无线电数传模块可增加信号覆盖面积,但其中地面中继基站是固定的,在某些没有信号覆盖的区域,需采用无人机中继通信;在无人机多机工作时,对信号弱的区域,无人机中继通信也可起到通信距离上的补充作用。图4为无人机与地面中继基站通信时的示意图,无人机可在中继基站通信范围内正常通信;图5是采用无人机中继通信的示意图,无人机飞出中继基站通信范围后需通过另一台无人机中继通信来完成整体通信过程。

图4 正常无人机通信Fig. 4 UAV normal communication

图5 无人机中继通信Fig. 5 UAV relay communication
3.3 无人机寻找
无人机失联是无人机远距离控制中容易出现的一种现象,具体情况为无人机处于数传信号辐射半径以外后,地面中转基站无法直接联系到,这是很危险的。在无人机失联时,可采用无人机作为中继基站的方法,通过云端服务器数据管理,查询最近无人机的位置,进行目标无人机寻找。
在本系统中,云端地面控制系统将通过TCP/IP协议向所有中继基站发送控制指令;各中继基站获取控制指令后,以MAVLink协议方式在各自领域内广播。目标ID无人机若收到控制指令,将执行指令任务并回复;当目标无人机不在中继信号范围内时,通过服务器数据管理库,获取最后一次目标ID无人机定位坐标,距离最近的无人机将会作为中继基站来寻找目标无人机,直至获取到目标无人机信息。指令通过MAVLink返回到中继基站,若附近无中继基站,将通过最近无人机作为临时中继返回指令,并最终回馈到云端地面控制系统中,完成信息流的执行。图6示出无人机失联系统的数据流向。
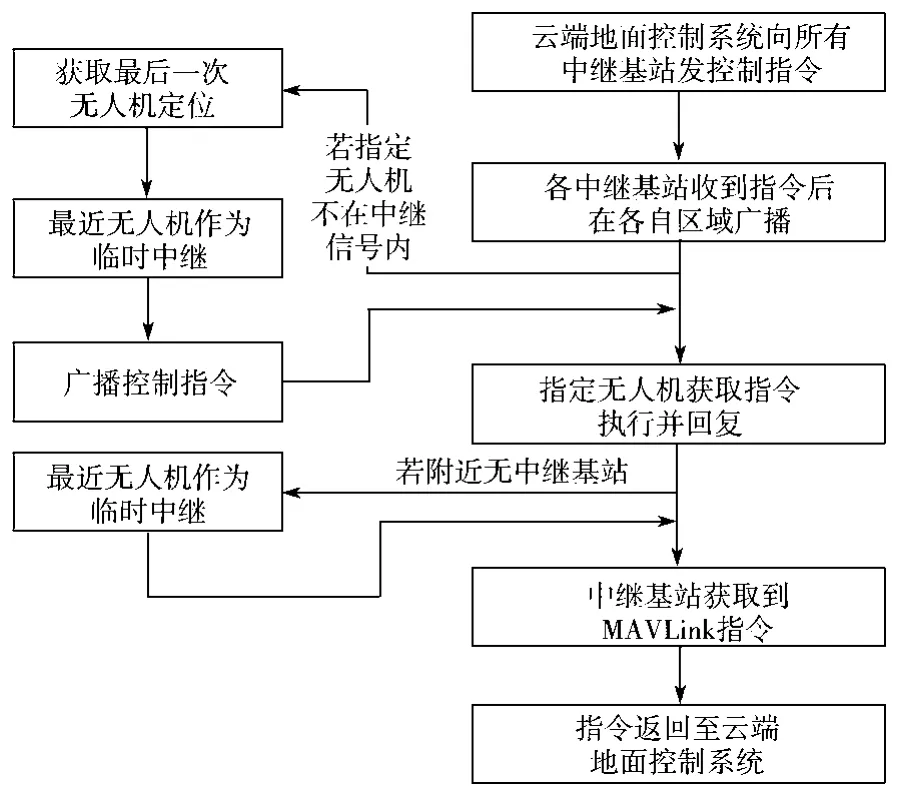
图6 无人机失联时系统数据流向Fig. 6 Data flow of the system when UAV loses contact
4 测试结果及分析
为了验证该方案的实际使用效果,通过实际飞行测试了无人机在多个基站间的飞行通信信息交互情况,如图7所示。无人机在飞行过程中,根据实际飞行的路径分别与3台地面中转基站通信,并响应基站的指令(如:降落、起飞等自定义MAVLink消息)。本次实验中,无人机成功与3台地面中继基站通信,并返回至云端地面控制系统,且可实现系统集中调度无人机执行命令,通信链路稳定。

图7 测试场地Fig. 7 Test site
5 结语
针对传统空中无人机通信方案通信距离短、4G信号覆盖不完全等不足,本文提出一种基于MAVLink消息自定义的无人机电力巡线中继通信系统方案,其采用无线电数传模块为基本数传单元,并与MAVLink通信协议相结合,通过地面中继通信基站带状设置、区域覆盖无线电信号通信,实现了无人机飞行过程中数据的解析及通信。无人机的数据流被传送到云端地面控制系统并将服务器作为空中管理资料库,加强了空中管理的措施,强化了对无人机的控制和无人机之间的飞行调配;无人机中继基站的应用提升了系统通信的范围和灵活性。作为一个应用场景,文章讨论了无人机失联时无人机空中中继方案。整个中继通信系统有助于无人机在电力设施巡检中的应用,为无人机空中通信提供了一种切实可行的方案,有很好的发展前景。后续,本方案可进一步改进,通过中继基站连接网络实现对无人机的远程网络控制。
