基于模型参数在线辨识技术的SOC估算方法
2020-11-18苏卫星何茂伟
刘 芳,马 杰,苏卫星,2,何茂伟
(1. 天津工业大学 计算机科学与技术学院,天津 300387;2. 北京矿冶科技集团有限公司 采矿冶金过程自动化国家重点实验室,北京 100160)
电池剩余荷电状态(state of charge,SOC)对于电动汽车能量优化管理及健康寿命管理均具有重要意义[1].为此,研究人员提出许多在线SOC估算方法[2-3],以适用于车载动力电池SOC在线精确估算的要求.其中基于动力电池状态空间模型的滤波算法以其独特的闭环矫正结构、较好的鲁棒性以及快速的收敛性被研究人员普遍认可,并被认为是目前取代库伦累加算法的最佳选择[4-5].但基于滤波的SOC估算方法精度却高度依赖于动力电池模型精度.针对此问题,学者们从两方面深入开展研究:其一是能够高度模拟动力电池充放电动态特性的电池模型结构[6-7],这也是目前科研人员主要的研究课题;其二是能够在线快速准确辨识模型参数的算法以实现非线性复杂模型时变参数的在线追踪[8-9].而目前,在电池模型参数在线辨识方面,研究人员普遍采用计算复杂度较低,且能够得到确定最优解的最小二乘算法(LS)及其衍生算法[10].虽然LS算法在线性问题中能够表现出较为明显的优势.但随着更为复杂的电池模型被不断提出,使得基于LS及其衍生算法在非线性较高的复杂电池模型上难以显示出其优势.
近些年,基于生物启发的智能算法不断发展,且在很多领域得到了较好的应用[11-12].由于其对求解问题的数学表达结构要求较低,因此在多目标非线性复杂问题中具有较高的求解能力以及计算精度[13].但由于其在全局空间内随机搜索的机制,使得其计算精度与迭代次数高度相关.因此在电池模型参数辨识一类实时性要求较高的问题求解上,较长的求解时间难以满足系统实时性要求.另外,生物启发算法容易陷入局部最优的问题也限制其在电动汽车领域的应用.
基于以上分析,本文提出一种能够快速缩小搜索空间,且有效避免陷入局部最优的在线快速搜索的优化求解框架,并在此框架下,以传统GA为实例,提出基于改进遗传算法(IGA)的电池模型在线快速参数辨识算法.进一步,将此算法应用于电动汽车动力电池“新一代汽车合作计划”(the partnership for a new generation of vehicles,PNGV)模型的参数在线辨识上,基于此参数辨识结果实现基于无迹粒子滤波(UPF)算法的动力电池SOC估算,并取得了较高的SOC估算精度.通过验证分析,其SOC估算结果在白噪声环境下以及有色噪声环境下,相比于基于传统LS的PNGV模型参数辨识结果实现的SOC估算(LS-UPF算法)具有更好的精度.
综上所述,本文通过特定应用环境对于算法需求的深入分析,选取较为适合的算法并加以改进以实现复杂环境下SOC在线的精确估计.
1 在线快速搜索的优化求解框架
本文以GA为基础,以电动汽车动力电池PVGN模型为应用实例,针对非线性强、实时性高的非线性模型参数求解问题提出主体架构如下:
步骤 1 利用泰勒级数方式将非线性数学模型线性化,并取一阶项,得到近似的线性模型结构;
步骤 2 利用较为简单易行的线性参数求解算法(如LS算法)辨识近似的线性模型,得到问题的粗略的、精确度较低的初始解P(0);
步骤 3 以此初始解为中心,模型参数的解的维度为搜索空间维度,在此空间内以r=[r1,r2,…,rm]为半径,确定超球体,即为GA的初始搜索范围rang(0).
可以看出,初始搜索范围rang(0)将远远小于传统GA的全局搜索范围,且极大地降低了陷入局部最优而无法跳出情况的发生概率,最终实现算法复杂度的降低和算法收敛速度的提升.以电动汽车电池PVGN模型为应用实例,模型如图1所示[14].
其中:Uocv为电池电动势;Cb,Re,Rp,Cp分别为电容、内阻、极化内阻及极化电容;Ud,I分别为端电压及电路电流;Ub为Cb两端电压;Up为Cp两端电压.
依据图1所示的PNGV模型,得到如下电池等效模型表达式:
(1)
其中:Udt为t时刻端电压值;Uocv(SOCt,Tt)为与SOCt及温度Tt相关的开路电压值;Ubt及Upt分别为t时刻PNGV模型电容Cb及Cp两端的电压;Δt为采样时间;It为电池电流值;P=[Cb,Rp,Cp,Re]为参数向量.
以上述PVGN模型为例,在线快速搜索算法详细描述如下:
1) 对式(1)进行变换,得到式(2)[15]:
(2)
式中,Udt-1,Udt-2,It,It-1,It-2为可测量的电压、电流值,基于式(2),得到
(3)
其中,θ=Δt/(CpRp).
利用前L(L为LS迭代的滑动时间窗口)时刻的电压值Udt及电流值It通过LS算法得到向量γ=[a,b,c,d,e]T的最优估计为
(4)
其中,φt=[Udt-1,Udt-2,It,It-1,It-2].
依据式(4)计算初始参考值P(0),以P(0)为中心点,确定初始搜索范围rang(0):
rang(0)=[min,max]=[(P(0)-r)±ε,
(P(0)+r)±ε].
(5)
式中,ε为无限接近于零的常数.
2) 生成初始种群:
(6)
式中:k=1,…,n,为t时刻初始种群的第k个个体值;Rand(0,1)表示[0,1]之间的随机数.
2 基于IGA算法的动力电池SOC估算
基于IGA算法的UPF的动力电池SOC估算总体流程图如图2所示.
图2中有关说明如下:
“开路电压法确定初始SOC”:此部分仅在电动汽车电池管理系统[16-17]第一次上电时计算一次,即,对于动力电池其生命周期仅发生一次.
“库伦法计算前m时刻SOC”:
(7)
其中:t表示时间,t=1,…,m,m≪TSOH,TSOH为电池寿命终止时间;η(Tt,It)为与温度Tt、电流It(放电时为正,充电时为负)相关的容量系数;Cn为额定容量;Δt表示采样周期.
“UPF粒子及σ点初始化”:首先,生成初始粒子集Partt,每个粒子的权重为1/N,N为粒子数目.其次,构造σ点集合Xt,其中每一个元素计算如下:
(8)
式中:i=1,2,…,N;l为UPF算法状态方程中需要估算的状态量的维度;λ=α2(l+k)-l为生成σ点集合时的尺度,α∈(0,1]表示σ点的搜索范围.
“UPF算法SOC估算”:式(2)与式(7)构成UPF的状态方程组,其中SOCt为状态变量,Udt为观测量.估算步骤如下:
1) 对σ点集合进行UT变换[18-19]:
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
Kt=Pxt,ytPyt,yt-1,
(18)
(19)
其中:Xt=[Xt0(i-),…,Xtj(i-),…,Xt2l(i-)]T为t时刻第i个粒子的σ点集合;Wm=[Wm0,…,Wmj,…,Wm2l]为σ点的权值向量;λ=α2(l+κ)-l,α∈(0,1]为σ点的搜索范围;β为方差精度;κ为状态变量尺度;Wc=[Wc0,…,Wcj,…,Wc2l]为σ点协方差的权重;φt=[φt0(i-),…,φtj(i-),…,φt2l(i-)]为根据σ点得到的模型端电压值向量.
2) 计算粒子的权重值,并进行归一化:
(20)
(21)
3) 计算SOC值:
(22)
3 仿真与验证
3.1 仿真数据生成
选用LG公司某款18650型电池对DSPACE公司动力电池模型进行配置.该模型能在一定程度上较为准确地表征动力电池的动态特性和热反应特性.并从有效性、精度两个层面进行算法验证分析:其一,直接利用IGA算法对PNGV模型进行参数辨识,观察其参数辨识结果变化趋势是否符合LG产品手册中对于电池参数的描述;其二,通过将本文提出的IGA-UPF算法与LS-UPF算法进行SOC的估算精度对比,验证本文提出的在线快速辨识算法的计算精度.验证分别在理想环境下以及噪声环境下进行.
本文以华晨公司某款电动车在新欧洲驾驶周期工况下采集的电池电流数据I作为电池模型输入量,通过电池模型计算得到参考SOC值SOCreal、参考Ud、温度T及其他内部参数,如图3所示.
3.2 基于IGA的PNGV模型参数辨识验证
利用本文提出的IGA算法对PNGV模型参数辨识,辨识结果如表1所示.
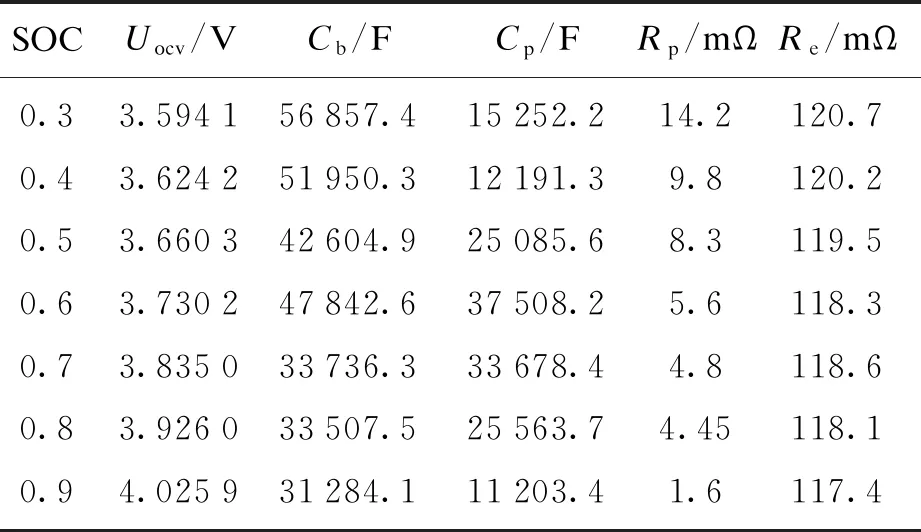
表1 模型参数辨识结果
由辨识结果可知,在26 ℃下,随着电池SOC值的不断下降,内阻Re随之增大,极化内阻Rp逐渐增大,电池电容Cb逐渐下降等,其变化规律符合电池电气特性变化规律.从而能够反映出本文提出的IGA算法在模型辨识上具有一定有效性.
3.3 基于PNGV模型参数辨识结果的SOC估算精度验证
3.3.1 无噪声环境下的精度验证
首先在无噪声环境下,同时利用本文提出的IGA-UPF算法以及传统LS-UPF算法进行电池SOC估算,从SOC估算应用角度验证本文提出的IGA算法的参数辨识的精度.验证结果如图4所示.
由图4a可以发现,本文提出的SOC估算方法的估算结果更贴近于SOC参考值,具有更高的精度,其在图4b误差图中表现得更为明显.在图4b中,IGA-UPF算法的估算误差收敛且相对平稳,LS-UPF算法的误差波动较大.也从侧面反映出对于非线性复杂时变系统而言,LS算法的模型参数辨识精度较差,影响UPF对于SOC的估算精度.对于动力电池在电动汽车背景下运行时,存在波动剧烈且尖峰瞬态电流较多的环境下,LS-UPF 算法的鲁棒性较本文提出的IGA-UPF算法要差许多.
3.3.2 稳定性验证
在相同的驾驶工况中,分别利用LS-UPF算法及IGA-UPF算法对相同数据序列进行多次的验证,结果如表2所示.

表2 IGA-UPF算法稳定性验证结果
由表2可知,IGA-UPF算法在多次验证过程中,始终保持较为稳定的绝对误差及均方根误差,具有较好的稳定性.与LS-UPF算法相比,IGA-UPF算法始终具有较小的误差.从而验证了较传统LS-UPF算法而言,本文提出的IGA-UPF算法具有更好的稳定性及准确性.
3.4 噪声环境下算法验证
3.4.1 高斯噪声环境下的算法精度验证
为了贴近实际,分别在电流及电压上叠加30 dB 和60 dB的白噪声;基于此噪声数据的SOC估算结果如图5所示.
图5a为IGA-UPF算法及LS-UPF算法在噪声环境下SOC估算结果,图5b为IGA-UPF算法及LS-UPF算法在噪声环境下估算误差结果.由图5可知,在噪声环境下,IGA-UPF算法依然具有很好的估算精度,且误差相对稳定;而LS-UPF算法的估算精度则出现严重误差,尤其样本点在2 000~2 500处,误差达到12%,这是工程无法接受的.
进一步增大噪声,即分别在电流It及电压Ud上叠加60 dB和80 dB的高斯白噪声;验证结果如图6所示.
由图6可知,代表弱噪声的“实线”SOC估算结果与代表强噪声的“点划线”SOC估算结果基本一致,并没有由于噪声的不同而表现出明显的差异性,均具有较好的SOC估算精度.因此可以证明本文提出的IGA-UPF算法具有较强的抗噪能力.进而也能从一个侧面反映出本文提出的IGA-UPF算法的抗噪能力.
3.4.2 有色噪声环境下的算法精度验证
有色噪声下,对提出的IGA算法的精度进行验证分析,方法如下:在电流和电压信号中加入有色噪声,并利用此数据进行基于UPF算法的估算验证,结果如图7所示.
由图7可知,在有色噪声环境下,基于IGA-UPF算法对SOC的估计结果仍然具有良好的估算精度,其最大误差仅为0.7%左右,且收敛效果较好.从一个侧面反映出IGA算法在电池模型参数辨识上的抗噪能力,能够有效抑制汽车噪声对于SOC估算的不良影响.
3.4.3 噪声环境下的稳定性验证
在高斯白噪声和有色噪声下,对IGA-UPF算法的稳定性进行验证如下:在相同的驾驶工况中,利用IGA-UPF算法对相同数据、不同噪声下进行多次验证,结果如表3所示.

表3 噪声环境下的IGA-UPF算法稳定性验证
由表3可知,在不同高斯白噪声强度下,基于IGA-UPF算法的SOC估算误差在多次验证下,均表现出较好的稳定性.在有色噪声下,该算法也表现出良好的稳定性.从而证明了本文提出的IGA算法在复杂噪声环境下依然具有较好的稳定性,适用于工程应用,具有一定的实用性.但也可以看出,SOC估算误差随着数据中噪声强度的增大而增大,这也从一个侧面说明,无论任何算法,当噪声强度过大时,提前的降噪处理是非常必要的.
4 结 论
1) 针对基于生物启发的遗传算法一类的全局搜索类优化问题存在迭代次数高、收敛速度慢以及易陷入局部最优等问题,面向非线性强的可用数学表达式确定性描述的模型参数辨识一类问题,提出一种模型参数在线快速辨识架构.该架构能够实现快速缩小最优解所在的空间范围,有效降低陷入局部最优的风险的同时,加快搜索速度,降低计算复杂度.
2) 本文以传统GA算法为基础,以动力电池PNGV模型为例,阐述提出的模型参数在线快速辨识算法的计算过程,并应用于动力电池SOC估算问题.
3) 在高斯噪声以及有色噪声下对提出的IGA-UPF算法进行验证,均得到较好的SOC估算精度;与基于LS-UPF的SOC估算方法相比,具有较高的估算精度,证明本文提出的模型参数在线快速辨识算法的有效性和实用性.
