一种立体视觉的障碍物检测的细化方法
2020-11-06林坚王力虎潘福东刘奎郁凡
林坚 王力虎 潘福东 刘奎 郁凡


摘 要:在立体视觉的障碍物检测过程中,由于室内地面的纹理特征较弱,使得检测的障碍物区域包含了较大的地面干扰,获得障碍物目标位置并不理想,该文使用了一种新的细化方法,改善了目标检测精度。该算法基于双目视觉获得深度信息,采用深度图像分割法提取出目标的粗略区域;然后结合其Canny边缘坐标信息对障碍物区域进行细化,进而得到准确的障碍物位置信息。实验结果表明了该方法具有较强的自适应性。
关键词:障碍物检测;立体视觉;图像分割;Canny边缘;细化
中图分类号:TP23;TP391.41 文献标识码:A 文章编号:2096-4706(2020)12-0070-03
Abstract:In the obstacle detection process of stereo vision,due to the low texture of the indoor ground,the detected obstacle area contains a large ground interference,and obtaining the target position of the obstacle is not ideal. This paper uses a new refinement method,improved target detection accuracy. The algorithm obtains depth information based on binocular vision,and uses the depth image segmentation method to extract the rough area of the target;then combines the Canny edge coordinate information to refine the obstacle area to obtain accurate obstacle position information. Experimental results show that this method has strong adaptability.
Keywords:obstacle detection;stereo vision;image segmentation;Canny edge;refine
0 引 言
隨着智能机器人技术的兴起,越来越多的移动机器人被应用于环境检测、自主导航、安防等领域[1]。意味着机器人需要具有更强的感知能力能来应对不同环境,因此如何提高机器人对障碍物检测的精度成了一个重要研究方向。由于立体视觉具有信息丰富、准确度高、效率高、使用方便等特点,被广泛应用于机器人的障碍物目标实时检测[2]。为了获得更加精确的障碍物空间位置和尺寸信息,本文提出了一种改进的立体视觉的障碍物检测方法。
近几年来,在基于视觉的障碍物检测方法中,基于深度学习的目标检测方法得到较为广泛的应用,张舜[3]等利用深度学习实现场景中目标的检测,该方法依赖先验的训练数据,不适用于要求实时性的场合。王军华[4]等采用基于改进RANSAC的双目障碍物检测算法,通过提取的地平面模型对障碍物进行分割。吴宗胜[5]等利用立体视觉并结合超像素技术对道路上的障碍物进行概率检测,主要是通过建立地面模型并评估三维空间点到地面的距离,得到障碍物的概率信息,进而实现障碍物和地面分离。这两位学者通过建立地面模型对障碍物进行分割,取得了较好的结果。但是对于一些特殊情况,如一些室内弱纹理的地面,立体视觉获取的深度信息存在较大误差,其所建立的地面模型并不准确,无法很好地得出障碍物检测结果。针对这一问题,本文通过结合立体视觉和边缘信息的障碍物检测方法,实现障碍物轮廓区域的精细化,克服误匹配的影响。
1 相关工作
针对上述问题,利用障碍物具有较强的纹理特征,而地面的纹理特征较弱这一特性,可通过结合图像的边缘坐标点信息,从而得到更加准确的障碍物信息。本文的主要工作为;首先采用双目相机采集并校正左右两幅图像,然后通过立体匹配计算得到场景中物体的视差图;最后根据深度信息进行图像分割,并在使用轮廓检测法提取障碍物大致轮廓区域基础上,结合Canny边缘检测算法计算其边缘的坐标信息,实现障碍物轮廓由粗到精的检测。下文对障碍物检测所涉及的基本原理进行介绍。
1.1 双目立体视觉测量原理
双目视觉成像模型如图1所示,根据空间点在左右相机的视差原理可测量出双目相机到被测物体的距离信息[6],以及更加精确的障碍物空间位置和尺寸信息,从而得到准确的障碍物位置信息。
若世界坐标空间中的任意点A(X,Y,Z)过光轴在左右相机成像平面的像点坐标分别为(ul,vl)和(ur,vr),当两像点对应的极线el和er处于一条直线上时,记d=ul-ur,根据三角形相似性,可求左相机成像平面像素点与空间点A的关系:
其中,f为焦距,b为基线,d表示空间点在左右相机平面上像点的视差。若给定左相机平面上的一点和与之对应有且只有一个的对应点,则容易得出该点在相机成像平面的坐标,进而可以确定该点在三维世界坐标系上的坐标。在双目立体视觉视差测量过程中,需要得到左右相机中像素点的匹配关系,本文采用的立体匹配算法为半全局块匹配算法(Semi-Global Block Matching,SGBM),该算法结合了局部立体匹配算法和全局立体匹配算法的优点,具有视差效果好并且速度快的特点,在计算机视觉中得到广泛应用。为了提高匹配算法的效率,需要对采集的图像进行校正,该方法实现左右两幅图像中待匹配的像素点在极线方向上对齐,将两幅图像的立体匹配时从二维搜索降为一维搜索,有效地降低匹配算法搜索的复杂度。
1.2 边缘检测
在计算机视觉中,图像边缘特征包含了图像的重要信息,广泛应用于目标检测、特征提取、图像增强等计算机图像处理,常用边缘检测方法有Sobel、Prewitt、LOG、Canny等方法。不同的边缘检测方法各具特点,在这些边缘检测方法中,Canny[7]边缘检测算法表现更为出色,是一种简单、准确、高效的边缘检测方法,所以本文主要使用Canny边缘检测算法实现场景物体的边缘检测。其步骤主要分成四步。
(1)通过构建一个高斯核对图像进行卷积操作,实现图像模糊处理,降低图像噪声。
(2)图像像素点的梯度强度和方向计算,梯度强度越大,边缘越明显。设水平梯度为Gx,垂直梯度为Gy,则每个像素点的梯度强度G和方向θ表达为:
(3)非极大值抑制。这一步主要是保留梯度强度局部最大值的边缘像素点,剔除大部分非边缘像素点,得到细化后的边缘。
(4)滞后阈值法求解图像边缘。通过设定Canny边缘检测算法高阈值和低阈值两个阈值,将大于高阈值的边缘定义为强边缘,属于有效边缘,将两阈值之间的边缘定义为弱边缘,当弱边缘连接了强边缘才属于有效边缘,小于低阈值则被排除。
1.3 障碍物检测
在障碍物检测过程中,我们通常认为距离相机较近的物体为障碍物,所以可以通过自适应阈值方法对视差图进行二值化处理,则通过选取视差图的均值作为阈值,进而得到二值图像。
为了降低由于噪声、遮挡等因素的影响,这里通过形态学方法对二值图像进行开运算处理,消除面积较小的连通区域。经过形态学处理后的图像进行轮廓检测法可获得障碍物所在的区域。
由于轮廓检测法获得的障碍物区域包含大量干扰成分,所以需要对其进行细化,以便得到更加准确的障碍物轮廓矩形区域信息。于是,在此基础上,通过求取障碍物区域边缘像素坐标点的外轮廓矩形,则可拟合出障碍物最小边框。障碍物区域的细化过程如图2所示,其中,星型物体表示障碍物,圆点表示障碍物的边缘坐标点。
2 实验与讨论
实验中计算机平台为i5-7500处理器,8 GB内存,软件平台为Python3与OpenCV,双目摄像机平台采用全瑞视讯200万像素的USB高清双目摄像头模块。通过相机标定和图像校正得到图像分辨率为598×322 pixel。相机标定的参数有基线为60 mm,焦距为640 mm,测量深度范围为500~3 000 mm。
图3是采用双目视觉方式实现的障碍物检测的细化结果,其中图3(a)为拍摄的室内真实场景中的左视图,图3(b)为立体匹配计算得到的视差图,并经过上色处理的伪彩色图,图3(c)为自适应阈值处理后的二值图像,图3(d)为细化后进行拟合的轮廓图。可以看出,根据视差图通过阈值法分割提取得到障碍物区域存在较大误差,而经过细化后的障碍物区域,只保留了障碍物轮廓特征,大大降低了地面对障碍物检测的干扰。
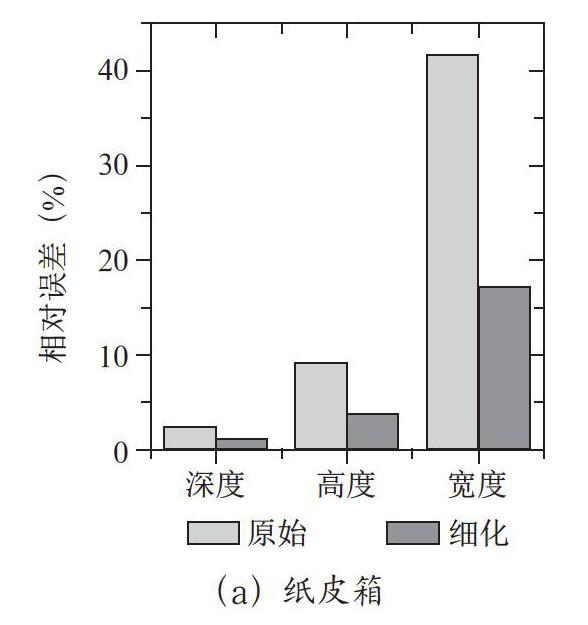
以真实场景中的纸皮箱和木凳作为障碍物,对比原始和细化后的相对误差,其结果如图4所示,其纵坐标分别表示深度、高度和宽度的测量相对误差值。可以看出经过细化后相对误差有较大幅度的下降,以宽度的最为明显,最大降幅可达75%,并且深度和高度的测量在细化后相对误差均在5%以下。
在时间复杂度方面,通过反复多次测量统计,算法平均总耗时为65 ms,基本上达到15帧每秒,满足系统的实时性,实验结果表明了该方法具有较强的自适应性。
3 结 论
本文是基于校内某项目的研究成果,结合立体视觉和边缘信息的实现障碍物检测,为机器人的避障提供较好的障碍物数据支撑。通过对室内地面的障碍物深度图的分割,提取出障碍物区域,然后利用Canny边缘检测算法计算得到该区域的边缘坐标信息,实现了障碍物识别的精细化,有效提高了障碍检测的精度,降低弱纹理地面因素的影响。在实际应用中,由于阴影和光照等因素干扰,大大增加了障碍物的检测难度,系统仍需针对这些干扰因素进行进一步的改良。
参考文献:
[1] 张耀威,卞春江,周海,等.基于图像与点云的三维障碍物检测 [J].计算机工程与设计,2020,41(4):1169-1173.
[2] LAN J H,JIANG Y L,FAN G L,et al. Real-Time Automatic Obstacle Detection method for Traffic Surveillance in Urban Traffic [J].Journal of Signal Processing Systems,2016,82(3):357-371.
[3] 张舜,郝泳涛.基于深度学习的障碍物檢测研究 [J].电脑知识与技术,2019,15(34):185-187+193.
[4] 王军华,李丁,刘盛鹏.基于改进RANSAC的消防机器人双目障碍检测 [J].计算机工程与应用,2017,53(2):236-240.
[5] 吴宗胜,李红,韩改宁.结合立体视觉与超像素技术的道路障碍物概率检测 [J].机械科学与技术,2019,38(2):277-282.
[6] 张易,项志宇,陈舒雅,等.弱纹理环境下视觉里程计优化算法研究 [J].光学学报,2018,38(6):226-233.
[7] HAN Y,CHU Z N,ZHAO K. Target positioning method in binocular vision manipulator control based on improved canny operator [J].Multimedia Tools and Applications,2019(5):1-16.
作者简介:林坚(1992—),男,汉族,广东吴川人,硕士,研究方向:系统集成;通讯作者:王力虎(1962—),男,汉族,山西文水人,教授,硕士生导师,博士,研究方向:工业自动化、计算机程序设计。