基于低分辨雷达系统的无人机微多普勒特征分析
2020-11-06李秋菊朱东方
李秋菊 朱东方


摘 要:小型无人机具有体积小、飞行速度慢、飞行高度低的特点,而基于低分辨雷达获取的回波信号在很短的驻留时间内获得,包含的目标信息有限,因此使用低分辨雷达系统对其进行分类是一项具有挑战性的任务。文章从微多普勒特征的角度分析了无人机目标回波信号,包括对单个旋翼回波建模,多普勒谱和时频谱的微动特性分布。实测数据分析表明,回波信号除包含无人机机身的平动频率分量,还可观测到旋翼产生的微多普勒分量。
关键词:无人机;微多普勒特征;时频分析;低分辨雷达
中图分类号:TN957.51 文献标志码:A 文章编号:2095-2945(2020)31-0005-04
Abstract: Small unmanned aerial vehicle(UAV) has the characteristics of small size, slow flight speed and low flight altitude. Based on low-resolution radar, the echo signals contain limited target information under the condition of low range resolution and short dwell time. Therefore, it is a challenging task to realize UAV classification by using low-resolution radar system. In this paper, we analyze the micro-Doppler signature of UAV target, including the echo modeling of single rotor and the micro-motion feature distribution of Doppler spectrum. The measured data analysis shows that the echo signal contains not only the translational frequency component generated by UAV fuselage, but also the micro-Doppler component by rotor.
Keywords: UAV; micro-Doppler signature; Time-Frequency Analysis; low-resolution radar
1 概述
近年来,无人机发展迅速,为消费者带来全新体验的同时,“黑飞”现象也频繁发生。无人机可以用于侦察、攻击,对军事安全、要地防御、重点设施防护、民航飞行保障、大型活动安保等带来了严峻挑战。因此,对无人机必须采取有效的管控与监测手段。快速准确的无人机检测和分类是近年来的研究热点之一[1,2]。
由于雷达具有全天候快速遥感的能力,雷达技术已被广泛应用于无人机探测和分类。雷达微多普勒是指在目标运动时产生的主多普勒分量之外观察到的微运动现象。近年来,目标微动特性分析引起学术界及工程界广泛关注及研究。目标微运动产生的微多普勒特征包含了目标的精细结构和运动细节等信息,可以从该信号中提取有用信息进行识别。
美国海军研究实验室Chen Victor C最早将微运动和微多普勒特征的相关概念引入到雷达观测中,对旋转、振动、进动等多种微动形式进行建模分析,阐述了根据微动特性实现目标分类的理论依据,写了一些人类微多普勒分析领域的重要出版物[3-5];加拿大雷达应用与空间防御技术研究所的Thayaparan等联合小波变换与时频分析,成功获取了直升机与行人窄带雷达回波的微动特征[6];国防科技大学着重对雷达微动目标特性进行研究,阐述了窄带及宽带雷达中目标的微动现象,并介绍了多种微动特征的提取方法[7];西安電子科技大学刘宏伟、杜兰等发表了多篇针对低分辨雷达目标分类方法的论文,提取了回波自相关矩阵的特征值谱特征,综合了CLEAN技术与EMD方法,实现了从回波中对微动分量的提取,并将分形理论应用于特征提取[8]。以上研究成果表明基于微多普勒特征的雷达目标分类方法研究是实际可行的。
本文开展使用低分雷达对无人机目标进行微多普勒特性分析,并与非无人机目标对比。文章结构如下:第2节对无人机单个旋翼回波建模,分析旋翼产生微动特性机理。第3节对实测无人机实测数据进行微多普勒分析。第4节讨论了无人机实测数据的时频谱分布。最后第5节对论文进行了总结。
2 无人机旋翼建模及分析
无人机目标主要包含机身及旋翼两种部件,如图1所示。机身平动可视为刚体运动,而由旋翼旋转为非刚体运动。
图1 无人机典型目标
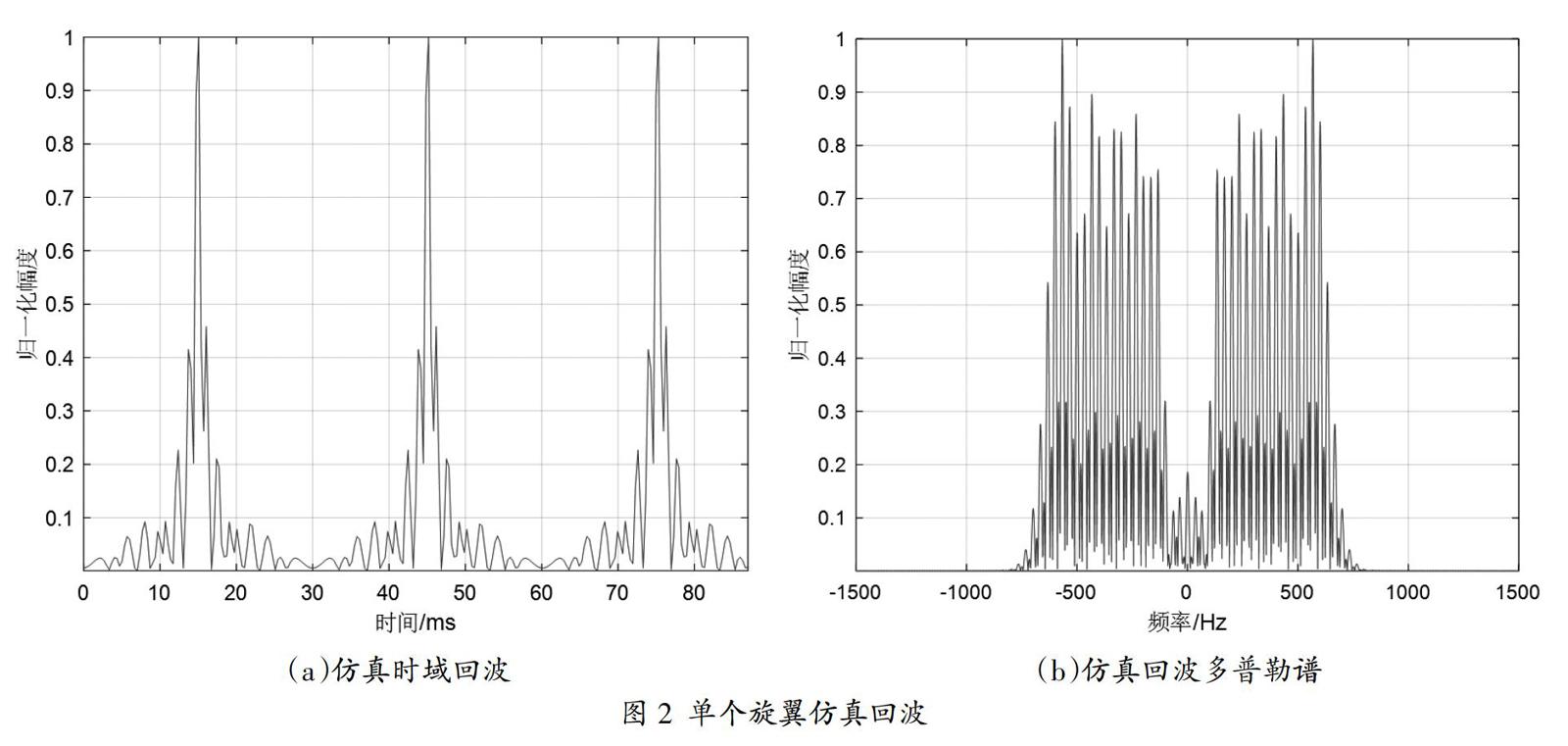
以单个旋翼为例,一个旋翼由多个桨叶叶片组成,每个桨叶可等效为一个条状散射体。对条状散射体各点散射回波积分可得单个叶片的散射回波,多个桨叶叶片回波叠加即可得到单个旋翼的回波。低分辨雷达体制下可对单个旋翼回波建模,仿真生成的单个旋翼时域回波及其多普勒谱如图2所示。
由于旋翼的对称性结构,每旋转至一定角度时,其有效散射截面积(RCS)会达到最大。因此旋翼旋转速度恒定时,其回波幅度表现为在某一时刻出现尖峰,且呈周期性出现,其重复周期与旋翼转速有关。多普勒谱则表现为呈对称分布的多条离散谱线。
3 无人机实测数据微多普勒特性分析
目标的回波含有微动信息,可以进行特征提取与分析,实现目标的识别。对于无人机目标来说,旋翼转动产生的微多普勒信息,是重要的分类依据。本节以无人机实测数据展开讨论。
用于实验的是一部脉冲多普勒体制的低分辨雷达系统,工作参数如表1所示。
表1 雷达工作参数
低分辨雷达系统实现无人机分类并不简单。除了无人机体积小、飞行速度慢导致回波信号弱之外,由于雷达回波的时间分辨率很低,因此在目标上驻留时间很短,可获取用于分类的微动信息有限。图3给出无人机悬停,慢速等多种运动场景下的雷达回波实测数据。
在数据采集实验中,雷达一个相关处理间隔(CPI)的脉冲积累数为256,称为一帧。在得到无人机目标的雷达回波后,一帧的各个脉冲间包含了目标的多普勒信息,对这256点信号进行傅里叶变换,就可以得到目标的多普勒谱。其中图3场景(c)为无人机目标先是处于悬停状态,机身多普勒频率位于零频率轴,后逼近雷达运动,机身多普勒频率移于正频率轴,雷达连续观测了目标的整个运动过程。同样场景(d)为无人机目标先处于悬停状态,后背离雷达运动。同时,每个场景我们都可观测到无人机机身主多普勒频率两侧的多条离散谱线。
目标的多普勒谱反应了目标的主体平动和微运动信息,我们正是利用这样的信息来对目标进行分类。图4给出无人机在悬停和运动状态下的实测数据单帧多普勒谱。可以看出,多普勒谱的峰值频率对应无人机平动速度,峰值两侧的若干个小尖峰,则对应无人机旋翼转动产生的微动分量。
然而实际情况中,旋翼分量并不能总是被雷达观测到,如图5所示。无人机目标体积小使得RCS小,常导致回波的微动分量微弱,另外若目标速度过慢,也可能会导致杂波与目标回波发生重合,对后面的分析产生影响。缺失重要的微动信息或者微动信息较弱,将会对无人机的高性能分类带来挑战。
时频分析可以显示信号瞬时频率随时间的变化规律,可有效显示和分析目标的微多普勒特性。图6给出无人机目标在悬停和运动状态下的时频图,用短时傅里叶变换获得。我们同样可以观测,无人机平动速度产生的频谱对应图中的峰值频率,峰值上下侧的离散谱线则对应无人机旋翼转动产生的微动分量。
在图6实测数据基础上还应进行杂波抑制和去噪等预处理,可保证在后续特征提取和目标分类时,使得微动分量不被噪声和杂波等无用信号影响。
4 结束语
在本文中,我们介绍了基于低分辨雷达系统生成的无人机实测数据的分析,包含无人机身平动分量,旋翼微多普勒分量,及噪声等无用分量,重点针对旋翼转动的微动特性进行建模和实测数据对比。分析表明,无人机回波信号的多普勒谱和时频谱均可观测到旋翼转动产生的微多普勒分量。根据上述讨论我们可知无人机的微多普勒调制特点,从而对无人机目标实行进一步的特征提取和分类。
参考文献:
[1]Jianfeng Ren, Xudong Jiang. Regularized 2-D complex-log spectral analysis and subspace reliability analysis of micro-Doppler signature for UAV detection[J]. Pattern Recognition, 2017, 69:225-237.
[2]Beom-Seok Oh , Xin Guo, Fangyuan Wan, Kar-Ann Toh, and Zhiping Lin. Micro-Doppler Mini-UAV Classification Using Empirical-Mode Decomposition Features[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(2):227-231.
[3]Al-Ashwal, W.A., Baker, C.J., Balleri, A., et al.Statistical analysis of simultaneous monostatic and bistatic sea clutter at low grazing angles[J]. Electron.Lett., 2011, 47 (10): 621-622.
[4]Chen, V.C., Fayin, L., Ho, S.S., Wechsler, H.: Micro-Doppler effect in radar: phenomenon, model, and simulation study[J]. IEEE Trans. Aerosp. Electron. Syst., 2006,42(1):2-21.
[5]Chen, V.C.: The micro-Doppler effect in radar[M].Artech House, 2011.
[6]Thayapaparan T, Abrol S, Qian S. Analysis of radar micro-Doppler signatures from experimental helicopter and human data[J]. IEE Proceedings on Radar, Sonar and Navigation,2007,1(4):289-299.
[7]金光虎.中斷弹道目标ISAR成像及物理特性反演技术研究[D].长沙:国防科技大学,2009:94-120.
[8]李彦兵,杜兰,刘宏伟,等.基于微多普勒特征的地面目标分类[J].电子与信息学报,2010,32(12):641-648.
