基于STM32茶叶红外杀青机温湿度模糊控制系统设计
2020-10-13裴刚黄俊仕艾施荣虞文俊熊爱华金山峰
裴刚 黄俊仕 艾施荣 虞文俊 熊爱华 金山峰


摘 要: 杀青是茶叶加工过程的第一道关键工序,其中杀青过程中温湿度的精确控制是保证茶叶品质的关键。为提高茶叶品质,保证茶叶杀青充分,又不产生大量枯叶,基于STM32单片机,采用模糊PID和PWM温湿度闭环控制系统,输入量为实际温湿度与上限值的偏差值,用输出量PWM值控制风扇转速及红外加热管功率,达到精确控制滚筒杀青所规定的温湿度,并由Matlab进行仿真验证。结果表明,采用模糊PID和PWM温湿度闭环控制系统能精确控制滚筒内的温湿度值,温度误差控制在2 ℃以内,湿度误差控制在3%RH以内,可防止杀青叶因温度降低过慢而被烧焦,滚筒内湿度过高被闷黄等现象,满足茶叶杀青工艺要求,从而保证茶叶品质。
关键词: 模糊PID控制; STM32; 茶叶杀青; 温湿度控制; 系统设计; 仿真验证
中图分类号: TN209?34; TN876 文献标识码: A 文章编号: 1004?373X(2020)19?0079?05
Abstract: Water?removing is the first important step of tea processing. As a key process, the accurate control of temperature and humidity is directly related to the quality of tea. In order to improve tea quality and ensure that the fresh tea leaves are fully water?removed without a large amount of bad leaves, a temperature?humidity closed?loop control system combining fuzzy PID and PWM is used to control the rotate speed of fan and the power of infrared heating tube on the basis of STM32 SCM, so as to achieve accurate control of the temperature?humidity values in the roller of water?removing machine. The deviation between the actual temperature/humidity and the upper limit is taken as the input, and the PWM value is taken as output. The simulation verification of the system is carried out with Matlab. The results show the fuzzy PID and PWM closed?loop control system can accurately control the temperature and humidity in the roller; the temperature error is kept within 2 ℃ while the humidity error is within 3%RH. It also can prevent the phenomenon that tea leaves are burnt due to the slow fall of temperature or become sallow because of too high humidity in the roller. Therefore, it can meet the requirements of tea water?removing process and ensure the quality of tea.
Keywords: fuzzy PID control; STM32; tea water?removing; temperature?humidity control; system design; simulation verification
0 引 言
杀青是绿茶初加工的第一道关键工序,其中杀青温度和湿度直接影响成品茶叶的品质[1],因此绿茶杀青过程中温湿度的精确控制非常重要。目前,茶叶杀青过程中温湿度的控制主要由制茶师凭经验控制,温湿度控制波动大,严重影响茶叶品质。因此,研发茶叶加工机械的自动控制系统,实现茶叶杀青过程中温湿度的精确控制,对于提升茶叶品质具有重要意义。
在自动控制领域,一般采用位式控制,通过设定上限值,比较当前值与上限值的大小控制继电器的开闭。位式控制编程简单,但因热源的惯性作用,温度会继续上升,从而使茶叶杀青过程中的温度难以精确控制。模糊PID控制算法在传统PID算法基础上,引入模糊控制规则,以实现精确控制的目的[1?3]。文献[1]采用PID算法,开发了茶叶杀青机PLC温度控制系统,以减少电机和热源的惯性作用。文献[2]采用模糊控制PID算法,实现杀青温度的精确控制。文献[3]采用自适应模糊PID控制算法,使杀青温度处于恒定值。上述研究只考虑了温度的精确控制对杀青叶质量的影响,并没有考虑湿度的影响。文献[4]利用模糊推理合成规则,提出一种有效的交叉解耦手段,达到精确控制温湿度的目的。文献[5]设计了一种基于模糊PID解耦算法的多功能禽舍环境控制系统,实现了对禽舍内温湿度的精确控制。
本文提出采用模糊PID算法对茶叶杀青滚筒内的温度和湿度同时控制,通过设置温湿度的上限值实现去湿风扇电机启停和红外管开闭的精确控制,达到杀青过程中滚筒内温湿度同时精确控制的目的。系统以STM32为开发平台,在上位机设置温湿度上限值,由模糊PID算法控制滚筒内温湿度值达到上限值前做出响应,自动控制电机转速和红外管发热功率,使温湿度始终保持在上限值附近,以达到对温湿度进行精确控制的目的。进一步由Matlab建立控制系统的温湿度一阶传递函数模型并进行仿真,探索模糊PID算法对茶叶杀青过程中温湿度精确控制的可行性。
1 茶叶红外杀青机整体结构及特点
茶叶红外杀青机的整体结构由滚筒、托轮、红外辐射传感器、红外测温传感器、湿度传感器、驱动装置、风扇、支架及控制系统等组成,其结构示意图如图1所示。滚筒由托轮横向支撑在支架上,其内部焊有导板、长条形导叶板和螺旋导叶片,以增强滚筒对茶叶的翻抛作用。红外辐射传感器、红外测温传感器、湿度传感器固定于一根不锈钢空心管上,并悬挂于滚筒中心。茶叶进料口和出料口置于滚筒右侧,由电机正反转驱动滚筒正反转,以实现鲜茶叶在滚筒内来回杀青,提高杀青效率。排湿风扇固定于带轮上的右侧面,由带轮传动实现风扇的正反转,风扇反转实现滚筒内的排湿作用,风扇正转协助杀青叶快速出料,以防止烧焦。
2 茶叶红外杀青机控制系统工作原理
首先,在上位机上设置滚筒内杀青温度规定的上限值、湿度上限值及杀青时间,同时在上位机设置定时器以控制杀青时间,将温湿度上限值由串口传输给STM32并发送指令,让STM32导通红外管的光电耦合继电器,杀青机滚筒开始预热,当杀青机滚筒内温度达到温度上限值时,提示将鲜茶叶送入滚筒内,开始杀青。上位机给STM32发送指令,启动定时器,并计时,滚筒在5 s为一个周期的时间内做正反转的周期运动,使杀青茶叶受热均匀并保持翻炒状态。在杀青过程中,温湿度传感器不断获取滚筒内当前的温湿度值,模糊PID算法根据当前温湿度值与上限值的偏差及偏差变化率决定输出PWM值的大小,由PWM值精确控制风扇转速及红外管的发热功率。鲜茶叶在滚筒正反转动下均匀吸收热量使其温度上升而散发出水分,当湿度传感器检测到湿度超过上限值时,开启风扇排湿。当规定的杀青时间到,上位机给控制器发送一个指令,风扇全速反转,将杀青茶叶排出,完成一次杀青过程。
3 茶叶红外杀青机温湿度控制系统设计
3.1 控制系统方案设计
3.1.1 总体框图
茶叶红外杀青机温湿度控制系统总体框图如图2所示,系统控制芯片为STM32,设置滚筒内规定的杀青温度和湿度上限值,由温湿度传感器采集滚筒内的温度和湿度值。计算采集的温湿度与设置的上限值的偏差及偏差变化率,通过模糊PID算法中的比例、微分和积分运算,输出PWM值,通过PWM值控制温度光电耦合继电器开闭的频率,从而控制红外管的功率,实现红外管温度的控制,同时利用PWM值控制风扇电机转速,将滚筒内的温度精确快速排出。
3.1.2 硬件电路设计
硬件电路由单片机最小系统、温度采集电路、湿度采集电路、红外管和直流电机驱动电路等组成,其电路图如图3所示。本设计采用STM32F103ZET6芯片作为MCU,温度采集传感器采用MAX6675,湿度采集传感器采用DHT11,直流驱动电路采用L293D芯片。L293D属于H桥集成电路,可以同时控制两路电机,实现调速和正反转。
3.1.3 温湿度控制系统控制原理
本文采用模糊PID算法控制滚筒内杀青温度上升到所规定上限值时,红外管完全熄灭,避免由于热惯性作用继续加热使温度继续升高产生过热现象,导致滚筒内温度控制不准确。由PID控制滚筒内湿度上升到所规定上限值时,风扇全速转动,避免因电机启动时间过长导致滚筒内湿度不能及时排出,使滚筒内湿度控制不准确。温度和湿度控制流程图如图4所示。
控制原理如下:在上位机设置温度和湿度上限值,由串口将温度和湿度上限值传输到STM32控制系统,当实际温度小于其上限值时,将温度与其上限值的偏差由PID算法控制PWM的输出,以控制红外管的功率,实现滚筒内温湿度的及时调整,将湿度与其上限值的偏差由PID算法控制PWM输出,控制排湿风扇电机转速,从而精确控制滚筒内的温度。
3.2 控制算法设计
3.2.1 经典PID控制算法
本文采用模糊PID算法实现温度、湿度的精确控制,输入量为温湿度的偏差值[e],输出量为PWM值[u]。经典PID控制算法公式如下[6]:
式中:[Kp]为比例系数;[Ki=Kp?TTi]为积分系数;[Kd=Kp?TdT]为微分系数;[e(k)]为第[k]次采样时温湿度偏差值;[e(k-1)]为第[k-1]次采样时温湿度偏差值;[e(k-2)]为第[k-2]次采样时温湿度偏差值。通过反复实验,得出温度PID比例系数为1、积分系数为0.03、微分系数为0.01;湿度PID比例系数为1、积分系数为0.05、微分系数为0.01。
3.2.2 自适应模糊PID算法控制原理
鲜茶叶在杀青过程中温湿度必须实现精确控制,才能保证茶叶品质。而经典PID算法,其参数[Kp],[Ki],[Kd]的值为常量,不能调节,导致温湿度调节时间过长,超调量加大,不能精确控制杀青过程中的温湿度。如果温湿度波动很大,会导致杀青叶烧焦,或杀不透,甚至产生闷黄现象,直接影响茶叶品质。而自適应模糊PID算法能对算法中的参数([Kp],[Ki],[Kd])进行动态修正,使系统始终处于最优控制状态[7?9],从而保证杀青过程中温湿度的精确控制。模糊PID算法控制原理框图如图5所示。图中,[e]是当前实际值与设定上限值的误差,[ec]是当前实际值与设定上限值的误差变化率。[Kp],[Ki]和[Kd]值由式(2)~式(4)计算。
1) 模糊化:将输入量乘以一个增益系数反映到论域上,绿茶杀青温度需控制在240~280 ℃之间,杀青湿度需控制在58%RH~64%RH之间,为确保杀青温度控制在一个恒定值,温度偏差[e]论域取[0,40],温度偏差变化率[ec]的论域取[0,2],湿度偏差[e]的论域为[0,10],湿度偏差变化率[ec]的论域为[0,3],即在茶叶杀青过程中温度偏差控制在2 ℃以内,湿度偏差控制在3%RH以内。将温湿度误差变化率,[ΔKp],[ΔKi],[ΔKd]用7个等级表示,即{NB,NM,NS,Z,PS,PM,PB},建立隶属度函数,图6是温度误差、误差变化率及湿度误差、误差变化率的隶属度函数图,用三角形曲线表示。
2) 模糊推理:建立模糊规则表,根据模糊规则表得到修正量[ΔKp],[ΔKi],[ΔKd],表1列出了对温湿度偏差及偏差变化率的修正量。
3) 解模糊:找出[Kp],[Ki],[Kd]与温湿度偏差[e]及其偏差变化率[ec]之间的关系,不断检测杀青机过程中温湿度与其上限值的偏差[e],计算其偏差变化率[ec],通过模糊控制原理,对3个参数进行在线修正,对照模糊控制表,得到3个修正量[ΔKp],[ΔKi],[ΔKd],由式(2)~式(4)计算当前[Kp],[Ki],[Kd]的值。
4 Matlab仿真
4.1 传递函数的获得
根据经验,对自适应对象可使用一阶系统惯性纯滞后公式,即[G(s)=K*e-τs(t0s+1)],建立温度、湿度的传递函数数学模型。由科恩?库恩公式[8]得到被控对象温度的传递函数模型为[0.3e-19s(60s+1)],湿度的传递函数模型为[0.5e-10s(48s+1)]。
4.2 经典PID控制仿真
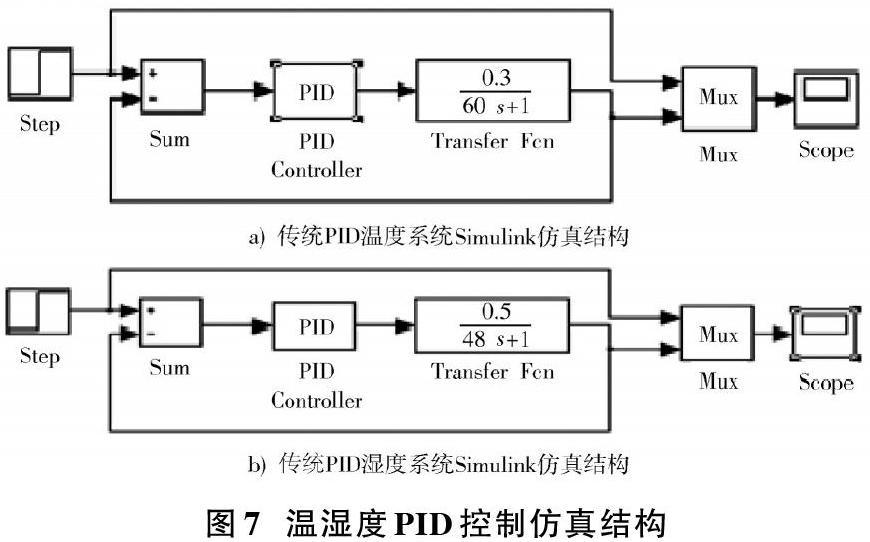
根据PID调节规律,将整定的系数[Kp],[Ki],[Kd]输入到PID Controller,输入信号为一个阶跃函数,利用Matlab的Simulink平台对PID算法进行仿真,温度的传递函数模型为[0.3e-19s(60s+1)]、湿度的传递函数模型为[0.5e-10s(48s+1)],对两个传递函数模型运用Simulink对温湿度进行仿真,如图7所示,温湿度PID控制仿真结果如图8所示。
由图8可看出,传统PID温度系统调节时间[ts=]350 s,超调量[σ=]1.25%,稳态误差[ess=0]。传统PID湿度系统调节时间[ts=]300 s,超调量[σ=]6.67%,稳态误差[ess=0]。由此可见,传统PID控制系统调节时间过长,超调量过大,导致温湿度不能精确控制[9?10]。
4.3 模糊PID控制仿真
使用Simulink中的模糊控制器对模糊PID系统进行仿真,温湿度Simulink仿真结构如图9所示,温湿度的阶跃响应函数如图10所示。
由图10可知,模糊PID温度系统调节时间[ts=]230 s,超调量[σ=]2.66%,稳态误差[ess]=0。模糊PID湿度系统调节时间[ts=]240 s,超调量[σ=]0%,稳态误差[ess]=0,相较于传统PID控制,温度超调量减少了1.4%,但调节时间减少了120 s,湿度超调量减小到0%,减小了6.67%,調节时间减少了60 s,温湿度得到更精确的控制。
5 结 语
本文采用模糊PID算法精确控制杀青机滚筒内的温湿度变化,并由Matlab仿真平台对滚筒内的温湿度进行仿真。结果表明,较传统PID控制算法,采用模糊PID算法进行滚筒内的温湿度控制,系统调节时间分别减少了34.3%,20.0%,超调量分别减少了1.4%,6.67%。防止鲜茶叶杀青过程中降温过慢而被烧焦,以及滚筒内湿度过高不能及时排出而产生闷黄现象,保证茶叶的品质。本系统温度误差控制在2 ℃以内,湿度误差控制在3%RH以内,满足对茶叶杀青的要求。
注:本文通讯作者为黄俊仕。
参考文献
[1] 葛良志,曹成茂,吴正敏.基于PLC的茶叶滚筒杀青机温度控制系统设计[J].安徽农业大学学报,2015,42(4):647?650.
[2] 曹成茂,吴正敏,梁闪闪,等.茶叶杀青机双模糊控制系统设计与试验[J].农业机械学报,2016,47(7):259?265.
[3] 郝朝会,孙传祝,苏夏侃.自适应模糊PID控制在茶叶杀青机中的应用[J].农机化研究,2013,35(2):201?204.
[4] 林荣川,林河通,林清矫.采用交叉补偿解耦的乌龙茶自动烘焙机温湿度模糊控制[J].农业工程学报,2012(20):80?87.
[5] 柴钰,于全刚.基于模糊PID解耦算法的多功能禽舍环境控制系统设计[J].家畜生态学报,2014(10):51?57.
[6] 顾蓉,王宝忠,刘浪.电镀电源控制算法的研究与仿真应用[J].现代电子技术,2015,38(15):145?148.
[7] 庹朝永.大型船舶蔬菜储藏仓库自动控制系统设计[J].食品与机械,2014,30(6):128?131.
[8] 刘浩蓬,龙长江,万鹏,等.植保四轴飞行器的模糊PID控制[J].农业工程学报,2015,31(1):71?77.
[9] 杨保亮,张守良.基于STM32和PWM的锂离子电池检测系统设计和研究[J].现代电子技术,2018,41(12):120?123.
[10] 王学林,葛兆斌,孙洁,等.基于积分I+模糊PD并行的果蔬高速抓取控制[J].江苏农业科学,2011,39(3):551?554.
