地铁线路区间纵断面节能设计优化模型
2020-10-09孙元广李佳杰周雨鹤
柏 赟,白 骁,孙元广,李佳杰,周雨鹤
(1.北京交通大学 综合交通运输大数据应用技术交通运输行业重点实验室,北京 100044;2.北京市基础设施投资有限公司,北京 100101;3. 广州地铁设计研究院股份有限公司,广东 广州 510176)
随着运营里程的日益增长,地铁系统能源消耗也逐渐攀升,其节能降耗引起了行业管理部门和运营单位的重视。列车牵引能耗一般占地铁系统能源消耗总量的一半以上,列车牵引节能是目前的研究热点之一。地铁牵引能耗不仅受运营方案和列车操纵的影响[1-2],也在很大程度上取决于系统的规划设计方案如列车选型和线路设计等[3-4]。
20世纪70年代以来,国内外学者对线路纵断面的节能优化设计展开了研究。Hoang等[5]基于最优控制理论构建了列车节能操纵优化模型,并结合列车运行特点提出了启发式算法求解区间节能坡设计方案。Kim等[6]和何永春[7]研究发现出站下坡和进站上坡的纵断面布置形式有助于降低列车牵引能耗。刘海东等[8]从列车属性、线路条件等角度分析了影响列车牵引能耗的因素,并指出节能坡设计尤其适合于站间距较短的城市轨道交通线路。梁广深[9]和乐建迪[10]分别基于列车速度位移曲线和牵引计算仿真结果分析了给定设计速度下节能坡的坡长和坡度取值范围。上述研究虽给出了地铁线路纵断面节能设计的方法和原则,但尚未构建优化模型直接求解最优的区间纵断面设计方案。
近年来,陈进杰等[11]构建了高速铁路区间节能坡优化模型,并设计了遗传算法求解最优的变坡点及其高程,使单方向运行的列车牵引能耗和运行时分的加权和最小,但未考虑纵断面设计方案对同一区间的对向列车运行时分和能耗也有影响。Lai等[12]在考虑列车运行行为的基础上构建了城市轨道交通线路平纵断面的优化模型,采用遗传算法求解三维空间中的线路最优设计方案,使系统全生命周期成本最小。需要指出的是上述模型并未充分考虑地铁设计规范的要求,忽视了纵断面设计方案因受地下建筑、桩基、排水管线和土质等因素影响需避让不良地质区域。因此,既有模型所得方案并不能保证可实施性,亟需研究考虑实际约束与设计要求的地铁线路纵断面设计模型。
本文综合考虑高程控制约束和坡度、坡长及变坡点位置要求等,以上、下行列车牵引能耗之和最小为目标,建立地铁站间纵断面优化模型并求解。最后,以国内某城市地铁线路为例,比较实际方案和本文优化方案下的能耗与时分等技术经济指标,验证模型与算法的有效性。
1 问题描述
地铁线路设计是在已知线网规划的基础上确定某一条或某一段线路在城市三维空间中的具体位置,主要包括车站位置选择、平面设计和纵断面设计。一般来说,纵断面设计在确定车站位置并完成平面设计之后进行,需考虑线路地理条件以及列车安全平稳运行的要求,明确任意两个车站之间的坡段设计以及坡段间的过渡连接。
线路纵断面设计主要包括各坡段坡度和坡长的设置以及坡段毗连处的竖曲线设计。坡段的坡度和坡长决定了列车运行附加阻力,进而影响列车牵引能耗和运行时分。通过优化站间区间的坡段组合方式以及相关参数,能够显著节约列车牵引能耗[8]。同时,当两个相邻坡段的坡度差大于等于2‰时,变坡点处须设竖曲线以保证行车安全平顺。竖曲线设计在确定区间坡段设计方案后完成,需从地铁设计规范中选取合适的曲线半径[13]。由于竖曲线对列车运行时分和牵引能耗的影响极小,本文主要研究区间的坡段设计方案,不对竖曲线做详细分析。
地铁线路设计的目标主要是在保证列车安全平稳运行的前提下实现工程造价和运营费用的节约。地铁新建线路目前一般采用安全性高、效率快的盾构法施工。采用盾构法施工时,线路纵断面设计方案一般不影响土石方成本,对工程造价的影响很小,但对后期运营成本如列车牵引能耗的影响非常显著。地铁线路服役年限一般长达数十年甚至上百年,运营阶段的列车牵引能耗成本总量相当巨大。因此,地铁线路纵断面设计应尽可能有利于减少运营阶段的列车牵引能耗。
为保证列车安全平稳运行、避免坡停现象发生,地铁设计规范规定了坡度、坡长的取值范围和变坡点位置的要求[13]。此外,为保证设计方案的可行性,地铁线路纵断面设计还需考虑地理条件的限制,如地下结构顶板的覆土厚度要求、避开地下桩基、管线以及不良地质条件(如淤泥质黏土及流沙地层)等。
如图1所示,本文在考虑地铁设计规范要求和施工限制条件的基础上,构建地铁区间纵断面节能设计优化模型,求解给定车站位置和平面设计方案下的区间最优坡度和坡长的组合方案为
Ω=[(L1,i1), (L2,i2),…, (Lk,ik),…, (LK,iK)]
式中:Ω为组合方案;ik为第k坡道的最优坡度,‰;Lk为第k坡道的最优坡长,m;K为坡道数量,K小于等于区间长度与最小坡长之间的除数。
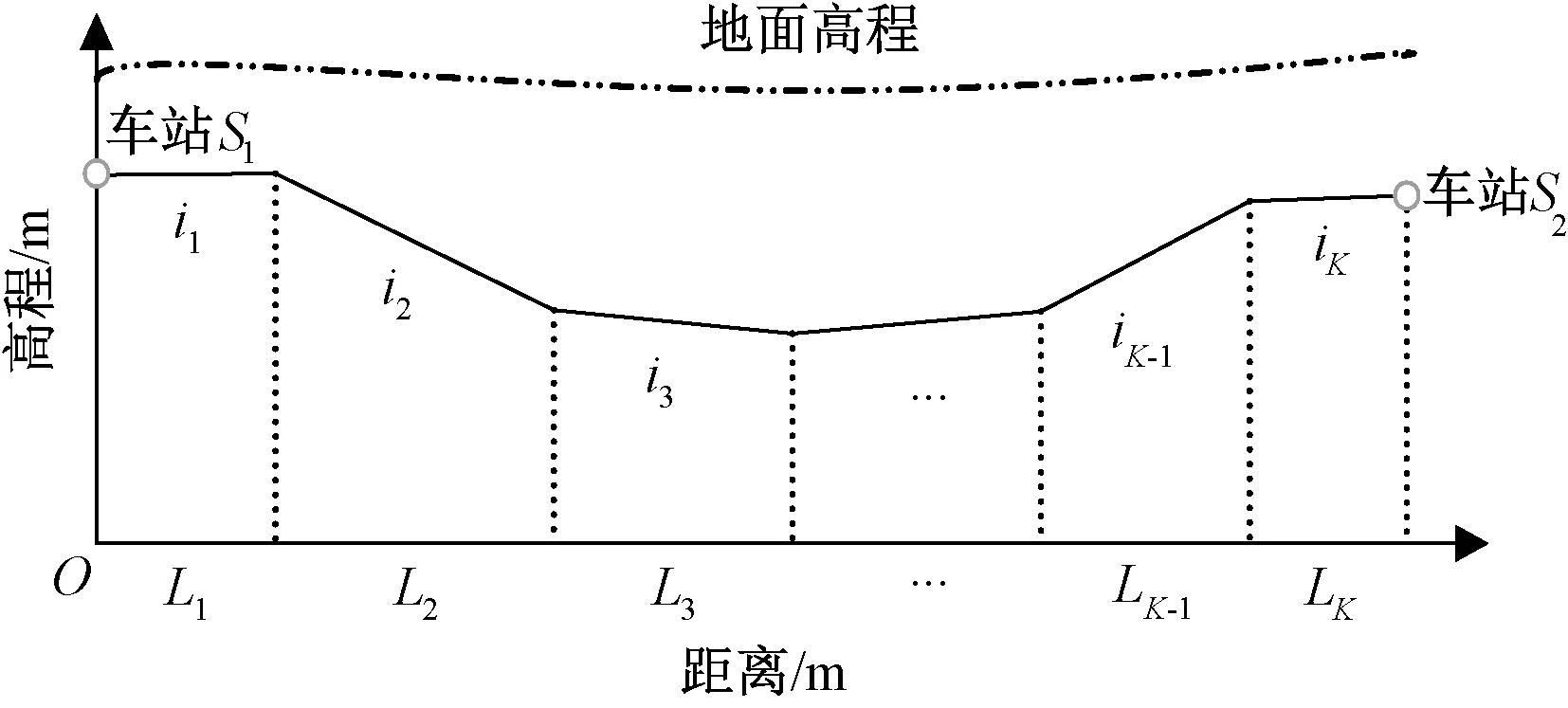
图1 地铁区间纵断面设计方案示意图
2 模型构建
2.1 模型假设
模型基于以下假设:
(1) 线路的平面设计方案和车站位置(包括里程和高程)已知且固定不变。
(2) 列车采用站站停模式,在任一区间运行的初速度和末速度均为0 km/h。
(3) 列车的运行策略[12]为:出站之后以最大牵引力加速,提高至设计速度v后采用巡航工况,即匀速运行,当到达巡航-制动的工况转换点后,列车以最大制动力减速进站。图2中,巡航-制动工况转换点由目标车站反推的制动曲线与前推的巡航曲线相交得到。当站间距较短时,列车无法加速到设计速度,则从牵引工况直接转换到制动工况,转换点由反推的制动曲线与牵引曲线相交得到。区间以Δs为单位划分为若干个等距离的步长,x1、x2分别为巡航和制动起始位置所在步长,X为列车区间运行终点所在的步长。
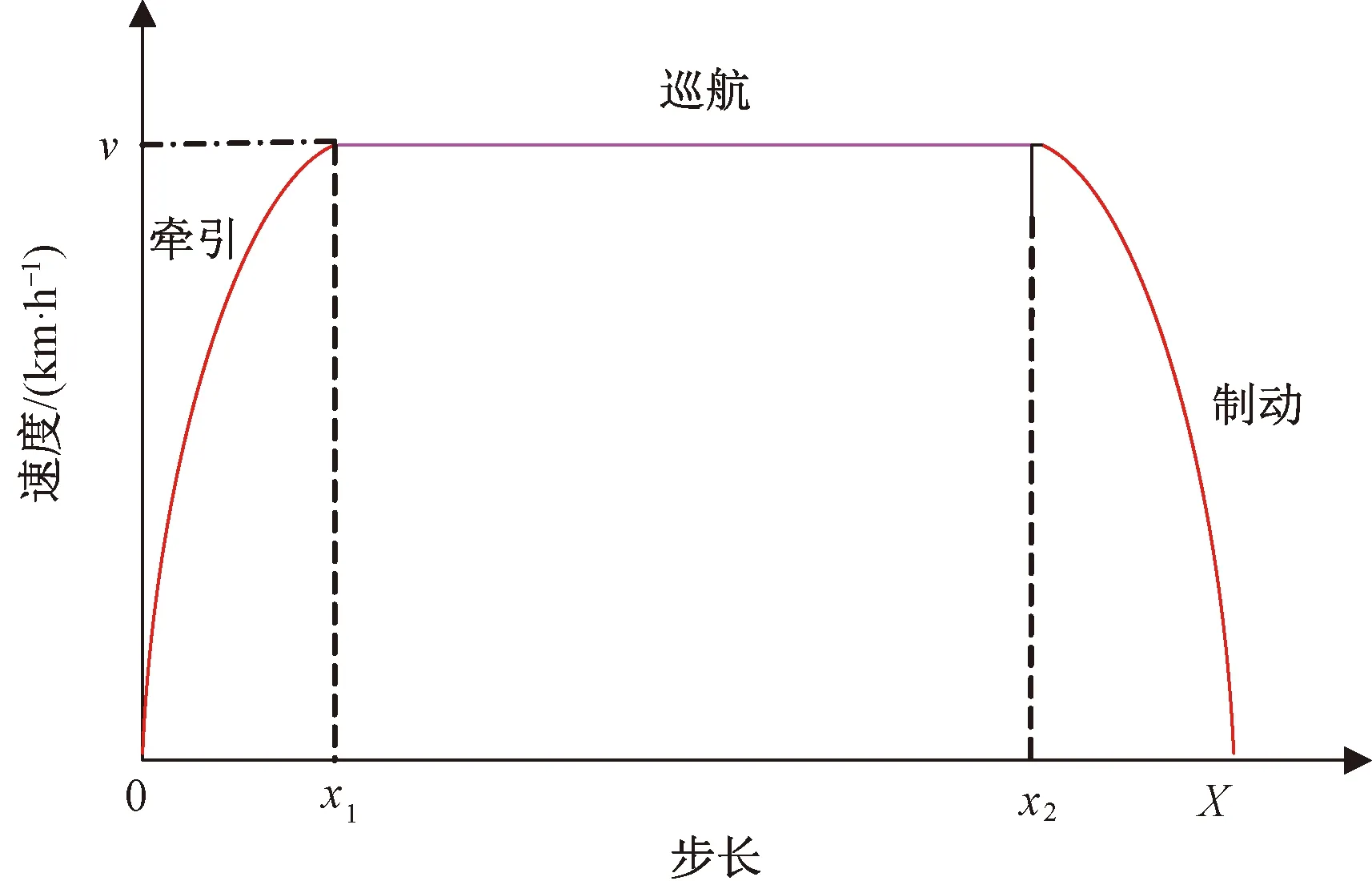
图2 列车操纵策略示意图
2.2 目标函数
模型的优化目标是列车在区间双方向运行的总牵引能耗最小。图2中列车在区间的运行过程包括牵引、巡航(站间距较短时不存在)和制动3个阶段。列车区间运行的牵引能耗主要来源于牵引和巡航阶段,因为制动过程中几乎不需要牵引能耗。
2.2.1 牵引阶段能耗
在列车牵引加速阶段,可以根据列车运动方程和功能转换关系计算每个步长的牵引能耗[14],然后对该阶段所有步长的牵引能耗进行累加。牵引能耗Emotoring为
(1)
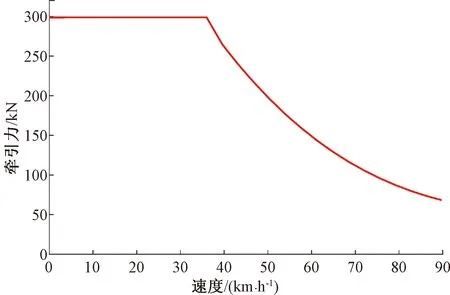
式中:F(vx)为第x个步长的牵引力,N,可根据该步长的列车运行速度vx在牵引特性曲线上查找具体数值得到;η为列车牵引电机传动效率常数。
根据牛顿第二定律,各步长速度vx为
(2)
ax=F(vx)/m-[w0(vx)+wx(Ω)]g
(3)
(4)
式中:ax为第x个步长的列车加速度,m/s2;m为列车质量,kg;w0(vx)为该步长列车所受到的单位基本阻力,N/kN;wx(Ω)为该步长列车所受到的线路单位附加阻力,N/kN,取决于该区间的坡段设计方案Ω;g为重力加速度,m/s2;a、b、c为基本阻力方程参数。
2.2.2 巡航阶段能耗
列车运行速度达到设定速度后将转入巡航阶段。在巡航阶段,当列车基本阻力和线路附加阻力之和为正时(如上坡道),需要一定的牵引力才能维持匀速运行。此时,列车牵引力在数值上等于列车受到的总阻力fx。总阻力fx为
fx=w0(vx)×m×g+wx(Ω)×m×g
(5)
若阻力之和为负数(如陡下坡),列车需制动才能维持匀速运行,此时牵引力为零。因此,巡航阶段的列车牵引力在数值为
(6)
根据功能转换关系,巡航阶段的牵引能耗Ecruising为
(7)
由于地铁线路上下行列车一般共用一个隧道,区间纵断面设计方案同时影响上下行列车的牵引能耗。因此,模型的优化目标为
(8)

2.3 约束条件
地铁区间纵断面设计的约束主要包括设计规范约束、地理条件对高程控制的约束和边界条件约束。
2.3.1 设计规范约束
(1) 区间正线坡段的坡度和坡长约束
受列车牵引能力限制,区间正线坡段的坡道不宜过大。地铁设计规范规定正线的最大坡度不宜超过30‰。此外,为方便区间排水,线路最小坡度不宜小于3‰,困难条件不小于2‰。imax、imin分别为区间正线坡度的上、下界限值,则
imin≤|ik|≤imaxk=2,3,…,K-1
(9)
为保证列车运行平稳性,地铁设计规范要求各坡段长度不小于远期列车长度[13]。另一方面,由于地铁线路站间距较短且在区间应设置排水沟,单个坡段的长度也不宜过长。因此,区间正线坡段的坡长范围约束为
Lmin≤Lk≤Lmaxk=2,3,…,K-1

(10)
式中:Lmax、Lmin分别为正线坡段坡长的上、下界,m;Lstation为站间距,m。
在实际设计中,区间正线坡段的数量不是固定值,但不会超过K。为方便模型求解,本文设定区间任意设计方案均有K个坡段,允许相邻坡段的坡度值相等。对模型求解后,可对具有相同坡度值的相邻坡段进行合并得到最终的线路纵断面设计方案。
(2) 车站坡长和坡度约束
根据地铁设计规范的要求,车站站台范围内的线路应设在一个坡道上。区间的第一个坡段i1和最后一个坡段iK属于车站坡。为保证不发生停站列车溜车和站台行李滑落等现象,地铁车站坡段的坡度不宜太大。因此,车站坡段的坡度值不超过车站最大允许坡度imax-z,即
|ik|≤imax-zk=1,K
(11)
由于坡度值较小,车站坡段不宜太长以便于列车出站加速和进站减速。因此车站坡段的坡长L1和LK不能超过Lmax-z。为保证列车运行平稳性,车站坡段的长度也不宜太小。车站坡段的坡长约束为
Lmin-z≤Lk≤Lmax-zk=1,K
(12)
式中:Lmax-z、Lmin-z分别为车站坡段的最大、最小长度,m。
2.3.2 高程约束
(13)
式中:in-1为第n-1条竖线所在坡段的坡度值,‰。
根据前述网格线系统,设计高程点约束条件具体如下:
(1) 线路埋深约束
线路埋深约束指地下隧道的轨顶设计高程应小于地面高程减去隧道高度Hg以及最小覆土厚度Ta(轨顶到隧道外径距离)之和,即
(14)
(2) 避让高程点约束
地铁线路纵断面设计方案需考虑地下土质、建筑物桩基、管线等因素,避开无法施工或难度较大的区域。为保证所得方案可实施,设置避让高程点约束为
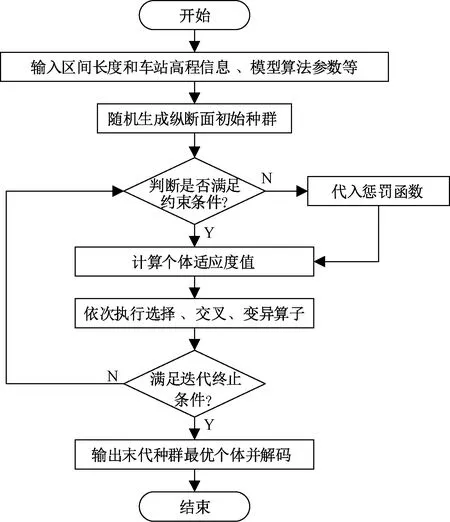
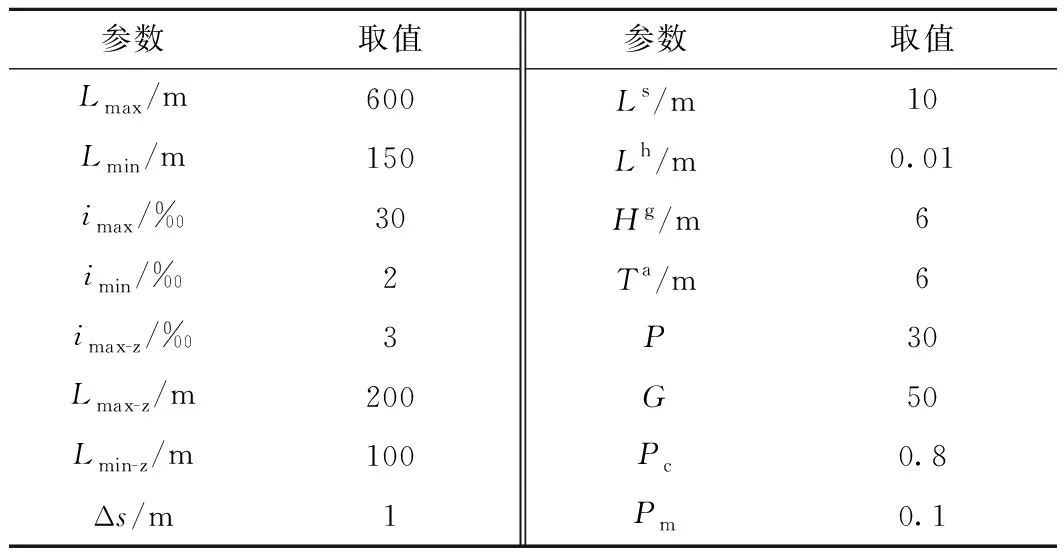
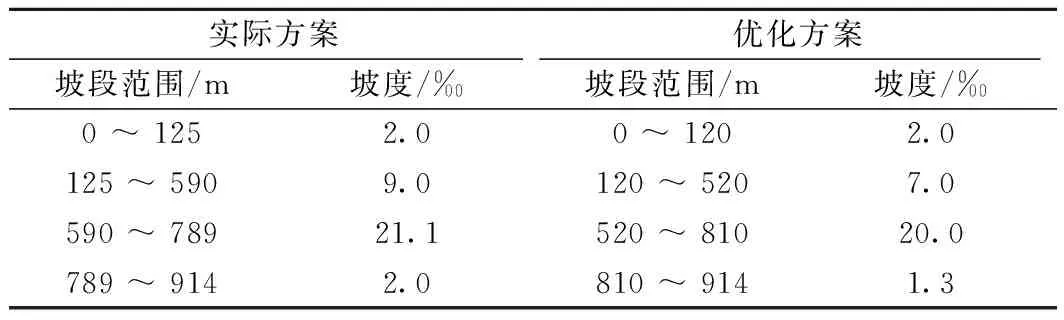
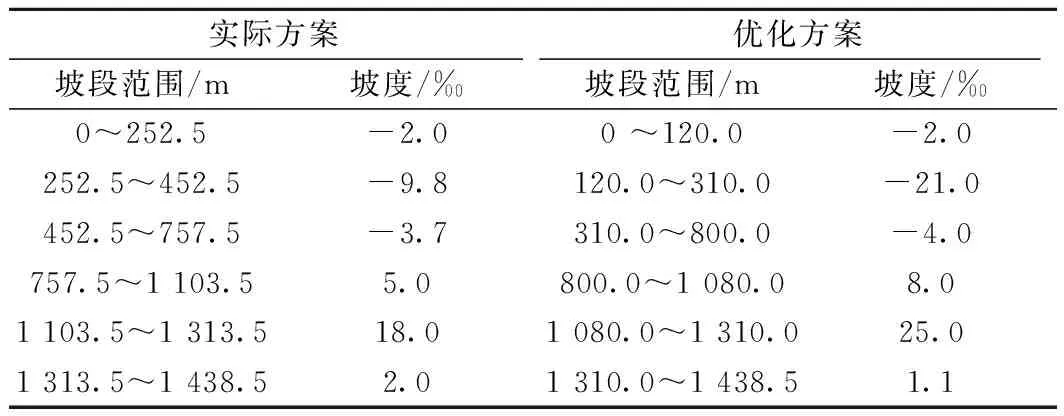
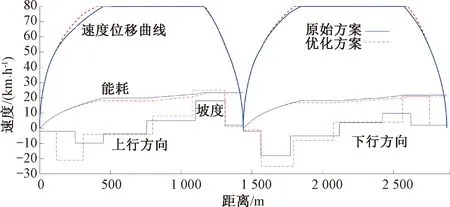
Bn=[H1n,…,Hqn,…,HQn]Q n=1,2,…,N (15) 式中:Bn为第n条垂直线上需避让的高程点总集合;Hqn则为第n条垂直线上第q个需避让高程点;Q为需避让高程点的数量。 2.3.3 边界条件约束 列车在车站起点和终点处的速度应为零,即 V0=VX=0 (16) 列车运行计算步长之和、网格系统的长度均应等于设计区间的站间距,即 (17) 由于车站高程不可改变,相邻车站的高程值、坡段的坡长与坡度应满足 (18) 上述优化模型具有非凸、非线性特征,决策变量较多且约束条件复杂,难以采用解析法求解。遗传算法是一种从生物进化机理中发展出来的模拟进化算法,是求解这类大规模非线性问题的有效方法,在高速公路纵断面优化设计上已有较多应用,取得了良好效果[15]。本文采用遗传算法求解上述模型。遗传算法从代表问题潜在解集的初始种群开始,按照优胜劣汰的原理,逐渐演化出适应度值更高的种群,最终逼近问题的最优解。算法流程见图3。主要步骤如下: (1) 种群初始化 将可能的纵断面设计方案视为独立个体,随机产生包含P个独立个体的初始种群。每个个体由若干基因表示,每个基因表示一个坡段的坡长或坡度,基因个数取决于坡段的数量。由于实数编码方式具有运算简单、大空间搜索能力强等优点,本文在此选用实数编码方式。 (2) 适应度计算 图3 算法求解流程图 适应度是个体适应能力的评判标准。由于本文优化模型是求最小值,选取优化模型目标函数即列车在该区间双向运行能耗的倒数作为适应度。当个体不满足约束条件时,适应度取极大正数M之和的倒数,使不可行的个体在后续进化过程中被淘汰,提高算法的求解效率。 (3) 遗传算子 遗传算子分为选择、交叉和变异算子,在求解过程中三者依次执行。本文采用轮盘赌选择法作为选择算子,适应度越好的个体有更高概率被选中去衍生下一代种群个体。对于交叉算子,采用常规的两点交叉法对两个已选择的染色体进行基因交换。为此,需先从父代种群中采用前述选择算子确定两个个体,然后随机确定一个交叉位置,最后以交叉概率Pc交换父代个体在该交叉位置上的基因进而产生两个新的个体。对于交叉算子得到的每个个体,随机确定拟变异的基因位,并以概率Pm执行变异算子,变异后新基因的值在该基因的合理取值范围内随机均匀选取。 如果交叉变异之后产生的新个体不符合约束条件,则在计算适应度前重新进行交叉变异操作,直至新个体满足约束条件。具体来说,在选取两个父代个体后对其进行交叉和变异操作,然后判断新个体是否满足约束条件,如果不满足则抛弃新个体并对原始的两个父代个体重新进行交叉变异,直至新个体满足约束条件为止。需要指出的是,如果这两个原始的父代个体交叉变异一定次数(本文取100)后仍不能产生满足约束条件的子代个体,则说明这两个父代个体不适合配对,此时重新从父代中选择两个个体进行交叉变异,以避免无效的交叉变异反复循环。 (4) 终止进化准则 当进化代数达到提前设定的代数G后,若最后两代种群的最优适应度值不变,说明算法已收敛,则输出末代种群的最优适应度值所对应的染色体并解码得到最终的纵断面设计方案。若算法尚未收敛,则最大进化代数在原数值基础上增加5代直至结果收敛为止。 本文选取某实际地铁线路的两个典型区间作为研究对象,对其纵断面设计方案进行节能优化。该线路设计速度为80 km/h,配属的列车为6节B型车,其牵引特性曲线见图4。为了更直观地表示出各坡段的坡长,将区间起始里程值都设为0。模型与算法的参数设置见表1。 图4 列车的牵引特性曲线图 表1 参数取值列表 第一个案例区间衔接的两车站高程相差8.88 m,站间距914 m,避让高程区域为横坐标500~700 m、纵坐标4.8~12.8 m的矩形区域。优化前后的纵断面方案及列车运行指标见表2,两种方案下的列车速度位移曲线和能耗增加趋势见图5。 可以看出,在两车站高程差较大时,采用先缓上坡后陡上坡 (另一方向为先陡下坡后缓下坡) 的单面坡设计形式是最为节能的设计方案。与出站就采用陡上坡相比,缓上坡有利于缩短列车加速时间进而减少牵引阶段的时间和能耗。进站前采用较陡的上坡则有利于将列车动能转换为势能存储。从另一方向来看,出站陡下坡更有利于列车加速,进站前采用缓下坡也比陡下坡有利于减少制动过程中的能量损失。尽管该区间的实际设计方案也采用了这种纵断面形式,但由于坡度和坡长的选择是基于仿真试凑的,其牵引能耗和运行时分指标均劣于本文优化方案。实际方案与优化方案的上下行总牵引能耗分别为48.5、46.9 kW·h,双向总运行时分分别为138.1、132.65 s,比实际方案降低了3.2%,运行时分略有缩短。 表2 案例区间一的优化前后纵断面方案及运行效果 图5 案例一纵断面优化前后的列车运行速度和能耗曲线 第二个案例区间衔接高程仅相差2.17 m的两车站,站间距1 438.5 m,避让高程区域为横坐标200~ 400 m、纵坐标17~ 27 m的矩形区域。优化前后的纵断面方案和列车牵引能耗及时分见表3,实际方案与优化方案上下行总牵引能耗分别为45.2、43.3 kW·h,双向总运行时分分别为180.6、179.6 s。两种纵断面方案下的列车双方向速度位移和能耗曲线见图6。 表3 案例区间二的优化前后纵断面方案及运行效果 图6 案例二纵断面优化前后的列车运行速度和能耗曲线 当区间衔接的两个车站高程相近时,采用先下坡后上坡的V型纵断面设计有利于节约列车牵引能耗。在本案例中,实际纵断面方案已采用了V型坡设计,但未能得到最优的坡度和坡长组合方案。本文模型在综合考虑区间设计速度、列车牵引特性以及纵断面设计约束的基础,求解得到了更为满意的坡段组合方案。由图6可知,优化方案设置的出站加速坡更接近车站且坡度更大,使列车更快地完成加速过程,从而节约了列车运行时分并使得牵引能耗降低了4.2%。此外,本文模型求解速度较快,只需几分钟就可以求解得到上述2个区间节能设计方案,与实际设计工作采用的仿真试凑方法相比可大幅度地提高设计效率。 由上述分析可知,区间纵断面设计方案很大程度上决定于相邻两个车站高程差。为此,以上述第二个案例区间为研究对象,仅更改第二个车站的高程值,并采用本文方法确定不同车站高程差下的最优纵断面设计方案,见图7。可以发现,当相邻两车站的高程差大于10 m时,采用单面坡的设计方案更为节能;当车站高程差小于10 m时,V型纵断面设计方案更有利于牵引节能。造成上述现象的主要原因是,当车站高程差大于10 m时,即便设置单面坡,其坡度值已超过20‰,这已经为列车出站加速提供了便利的线路条件,此时无需设置为V型纵断面。 图7 不同高程差值的最优纵断面布设方案 本文结合地铁设计规范,综合考虑了区间的坡度坡长取值范围、避让高程点和线路埋深约束等实际工程设计中需考虑的因素,建立了给定车站高程下的地铁区间纵断面节能设计优化模型,并以某城市地铁线路的典型区间为例证明了本文方法的适用性和效果。研究结果表明:当站间距比较短且两站高程差较大时,采用先缓上坡后陡上坡(反方向为先陡下坡后缓下坡)的设计形式较为节能;当两车站高程差相近时,采用高站位、低区间的V型纵断面设计形式更为节能。 本文研究对象仅为给定车站高程下的区间纵断面设计方案,未考虑车站高程设置对列车运行能耗和时分的影响,在下一步研究中将进一步考虑车站位置和区间纵断面设计方案的协同优化,实现地铁线路全线的纵断面自动设计优化。此外,本文仅以盾构法施工的地铁区间为研究对象构建了以列车牵引能耗最小为优化目标的纵断面优化设计模型。目前仍有少数地铁线路采用明挖法施工,在评价这类地铁线路纵断面设计方案时还应考虑土石方量等影响建设成本的指标,下一步研究中将继续探索以全生命周期成本最小为目标的地铁线路纵断面优化设计问题。3 求解算法
4 案例分析
4.1 车站高程相差较大的区间

4.2 车站高程相近的区间
4.3 车站高程差值的灵敏度分析

5 结论
