ISAR实时成像处理实验系统的设计与实现
2020-09-26王俊岭郭永强纪经明
王俊岭,郭永强,纪经明
(1. 北京理工大学 信息与电子学院,北京 100081;2. 北京跟踪与通信技术研究所,北京 100094)
近年来,随着近地轨道商业化的启动,空间目标的数量在可预期的未来一段时间内会迅猛增加[1]。逆合成孔径雷达(inverse synthetic aperture radar,ISAR)可全天时、全天候地实现空间目标的工作状态监控和故障诊断,是卫星测控之外的主要非合作探测监控手段之一[2]。在研究生课程“高分辨探测与成像雷达系统设计”这门课中扩展“空间目标 ISAR成像系统设计”方面的内容,是面向航天院所的定向研究培养方案探索,也是适应未来宇航商业化发展前沿技术的教学内容更新,符合未来新兴技术人才的培养需求。
空间目标 ISAR成像系统的信号带宽较宽,一般在400 MHz~8 GHz之间,并且为了增加探测成像距离,脉宽一般在百微秒量级,有的甚至达到毫秒量级,由此产生的信号处理量要求成像处理系统具有很高的实时运算性能[2]。目前常用的 ISAR实时成像处理系统一般基于定制的FPGA和DSP处理板搭建,可实现特定雷达系统的实时成像处理[3-6]。然而,这种定制式的实时成像处理系统导致实验设备成本高昂。此外,FPGA和DSP处理板的接口不仅复杂,对研究生的嵌入式硬件编程基础的要求也很高,采用此类系统作为实验教学平台很容易使得教学重心偏向于数据处理板的接口调试以及嵌入式编程教学方面,不利于实际的教学效果。
随着并行处理技术的发展,GPU(graphics processing unit)已具有远超多核 CPU的峰值浮点运算吞吐量[7]。而统一计算架构(compute unified device architecture,CUDA)的提出不仅使GPU能够应对高度并发且数据量大的计算需求,还能广泛应用于通用计算场景[8]。ISAR成像处理中回波不同数据点的运算具有独立性,很容易转换为并行处理。这意味着可将GPU平台引入到ISAR成像处理中来解决实时处理系统中的运算性能瓶颈问题。因此,GPU平台的开发应用成为ISAR成像处理系统研究的研究热点之一[9-10]。将 GPU平台引入研究生实验教学的好处是:一方面GPU平台采用扩展的C/C++语言编程,相对更容易实现,对研究生的编程基础要求相对要低些,有利于实验教学的整体质量提升;另一方面GPU可搭载商用工作站或者服务器作为信号处理平台,有利于实验教学设备的后续维护与升级。
本文给出了一种空间目标 ISAR实时成像处理系统的设计方案,并据此方案研制了一套实验教学平台。该实验平台的硬件系统采用 GPU和磁盘阵列搭载商用服务器的方式来实现,学生可在该硬件平台上编程实现空间目标 ISAR成像处理中的参数设置、成像处理以及结果显示等具体模块化功能。该平台对外硬件接口简单,无需接口调试,而模块化的编程设置不仅可灵活适应不同的雷达系统参数,还便于各个实验步骤的结果分析,检验具体的实验效果。
1 系统总体设计方案
图1给出了该空间目标ISAR实时成像系统的示意图。该实时成像处理系统搭载在实时成像处理和显控服务器上。系统具体工作流程为:(1)原始回波数据由数据存储模块读出并缓存至服务器内存;(2)显控处理模块读取服务器内存中的原始回波数据,并在解析数据参数后进行信号预处理;(3)显控处理模块根据系统参数配置信息计算空间目标轨道、成像处理参数等信息,并以变量形式将配置参数由内存传递给成像处理模块;(4)成像处理模块由内存读入回波数据,并根据系统参数配置和目标轨道对回波信号进行平动补偿、脉冲压缩处理,获取目标一维距离像,并送至服务器内存;(5)成像处理模块根据获得的一维距离像序列,进行包络对齐、相位自聚焦、方位向FFT等处理,获取目标的二维ISAR像,并送至服务器内存;(6)显控处理模块读入一维像和二维像成像结果,并在显示界面上实时显示;(7)数据存储模块负责实时存储各步骤的处理及成像结果。
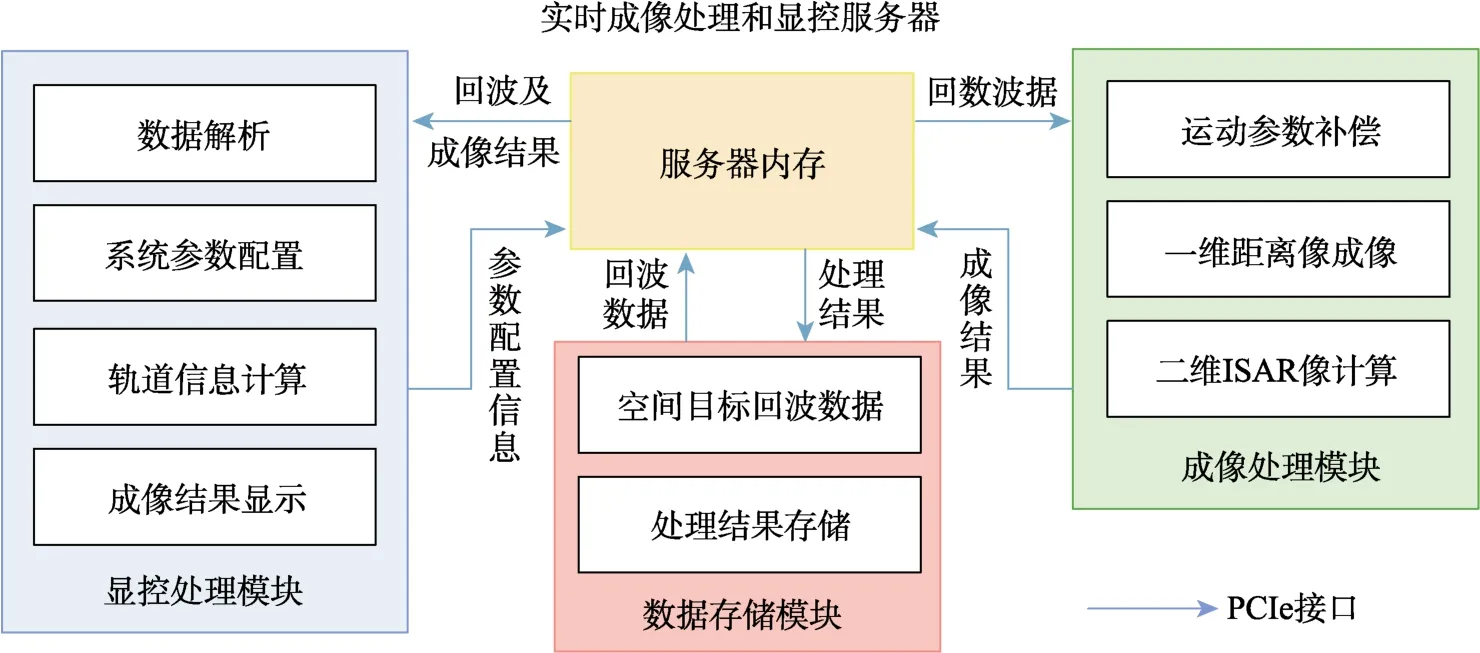
图1 ISAR实时成像处理系统
在上述各步骤的处理过程中,各模块均通过PCI-E总线互联,而数据和参数信息则通过服务器内存进行交换。这种处理方式降低了各模块数据交互的复杂性,且在实验过程中可直接读取内存数据信息分析各步骤的具体实验结果。处理系统模块化的划分方法也将ISAR成像处理过程转化为多个功能相对独立的子模块,便于实验过程中的系统功能调试。
2 硬件系统具体实现
根据设计需求,数据存储模块应在实时读入存储的原始回波数据的同时存储各个子模块的处理结果,采用普通的硬盘无法保证数据传输的实时性。因此,数据存储模块采用由多个固态磁盘和RAID控制器搭建成的磁盘阵列,并配置为条带模式以提高数据吞吐量,实物如图2所示。
空间目标 ISAR成像系统通过宽带回波信号的脉冲压缩实现目标的距离向分辨,通过一维距离像序列慢时间维的傅里叶分析实现目标的方位向分辨[2]。在上述处理步骤中,存在大量的矩阵相乘、矩阵转置、插值以及FFT等密集型计算,且不同数据点间的运算相对独立,因此可使用GPU实现成像处理模块的运动参数补偿、一维距离像成像以及二维ISAR像计算处理。

图2 磁盘阵列的固态磁盘和RAID控制器
GeForce GTX1080 GPU是英伟达公司针对高性能计算需求推出的通用计算GPU,具有9 Teraflops的单精度浮点计算能力和8 GB DDR5X显存[11],如图3所示。运动参数补偿以及一维距离像成像计算的处理对象均为单次回波信号;而目标二维 ISAR像计算则是对一维距离像序列中各距离单元慢时间维进行傅里叶分析,需等成像积累时间内的多个一维距离像处理完毕后方可进行处理。因此,可采用两个 GeForce GTX1080 GPU构建成像处理模块,完成一维距离像成像以及二维ISAR像计算:GPU 1实现空间目标的运动参数补偿以及一维距离像成像计算,并将处理结果缓存至内存;GPU 2则在获得一个成像积累时间内的所有一维距离像后进行方位向成像处理。

图3 GTX1080显卡[11]
显控处理模块需解析出回波数据帧头信息、目标轨道根数以及雷达系统参数,然后计算出成像处理模块所需的空间目标轨道信息,并将系统参数配置传递给成像处理模块。该模块整体运算量较小,且逻辑运算相对复杂,主要由服务器的两个CPU来完成。整个服务器可采用超微的服务器解决方案实现。
综上所述,整个成像处理系统教学实验平台搭载在一台高性能服务器上,结构布局如图4所示。该系统由具有通用接口的商用板卡或芯片搭建,实验时无需进行额外的接口调试,且更新换代简单,符合实验平台搭建要求。
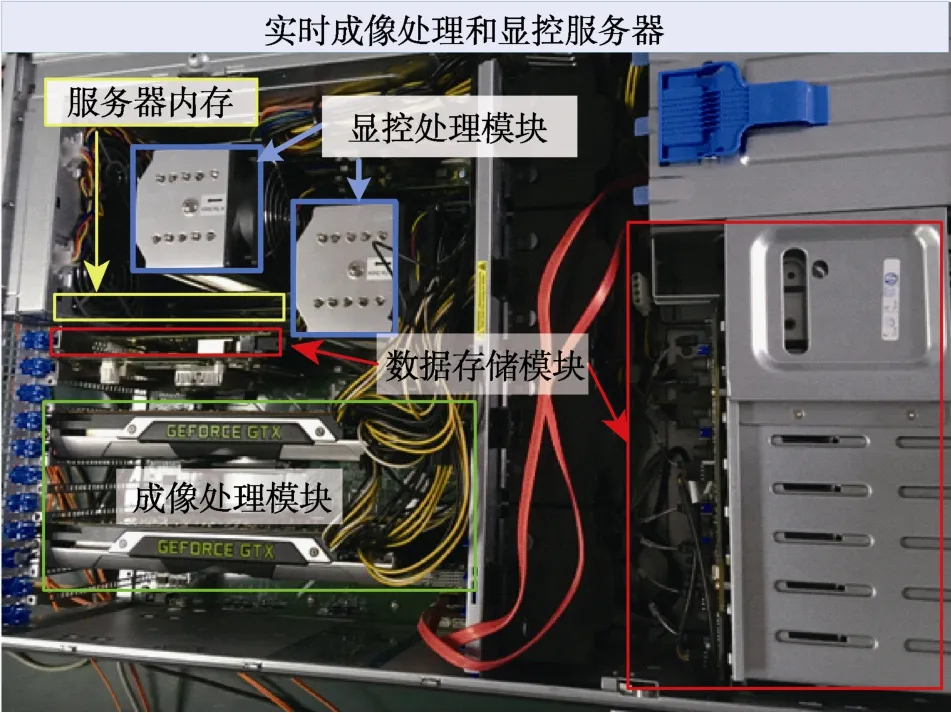
图4 实时成像处理系统硬件模块实物图
3 软件系统具体实现
根据总体方案,整个软件处理流程如图5所示。在系统开始后,服务器CPU完成系统初始化,开始读入回波数据并进行数据解析,然后运行轨道计算模块获取空间目标轨道,将轨道信息以及显控界面参数设置传递给GPU 1进行参数补偿、匹配滤波等处理,获取空间目标一维距离像,并由显控界面显示。在积累足够的一维距离像序列后,GPU 2对回波序列进行包络对齐、相位自聚焦以及方位向FFT处理,获取空间目标二维像,并将二维像量化后由显控界面显示。以上各步骤均对应一个处理子模块,可灵活适应不同雷达系统和处理需求,同时也便于分析各步骤的处理结果。图5中带数字的箭头指向位置则为实验结果监测点。具体实验时可将监测点的处理结果存入磁盘阵列中,然后由 MATLAB软件读入监测点的处理结果来分析空间目标实时成像处理中当前步骤结果是否正确。这种模块化设置不仅有利于学生完成具体实验程序的调试,还可辅助指导老师对实验结果评分。
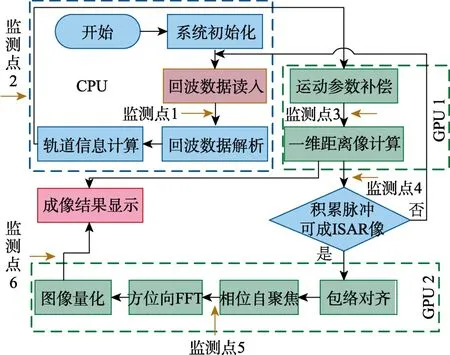
图5 空间目标成像处理软件流程
空间目标成像处理软件的显控界面为软件系统各个模块的对外接口。如图6所示,显控界面按照功能区划分为雷达参数设置、目标参数设置、成像参数设置以及成像结果显示等多个区域。具体实验时,学生可根据显控模块的区域划分以及空间目标 ISAR成像处理流程编写对应的信号处理模块,完成各模块的功能及性能测试。

图6 空间目标成像处理软件显控界面
4 系统功能模块指标测试与实验结果分析
4.1 PCI-E接口带宽测试
实时成像的前提是数据模块能够保证实时读写磁盘阵列的原始回波数据和成像结果。对占空比在 0.1以下的空间目标回波数据,其上限Sup可表示为:
Sup=0.1×fs×Bs×2. (1)
其中,0.1表示占空比;fs为信号采样率;Bs为每个采样点的有效字节数;最后乘以2表示回波信号为复采样。采样率为5 GHz,采样点有效位数为2 B时,所需的读写带宽上限为1 907 MB/s,即实验系统中服务器内存与磁盘阵列之间、GPU与内存之间的数据读写速度均需超过该值。
图7给出的磁盘阵列读写速度测试结果表明,系统内存至磁盘阵列的读写速度可达到2 850 MB/s,满足数据的读写要求。
此外,根据空间目标 ISAR成像处理流程,两个GPU均需实时从内存读入回波数据或成像结果,并将自身结果存入内存。因此,GPU与内存之间传输带宽也应满足成像处理要求。
表1给出了两个GPU同时工作时,各GPU与内存之间的读写速度测试结果。由表1可知,GPU与内存之间的读写速度在 5 500 MB/s以上,满足设计的ISAR实时成像处理需求。

图7 磁盘阵列读写速度测试结果
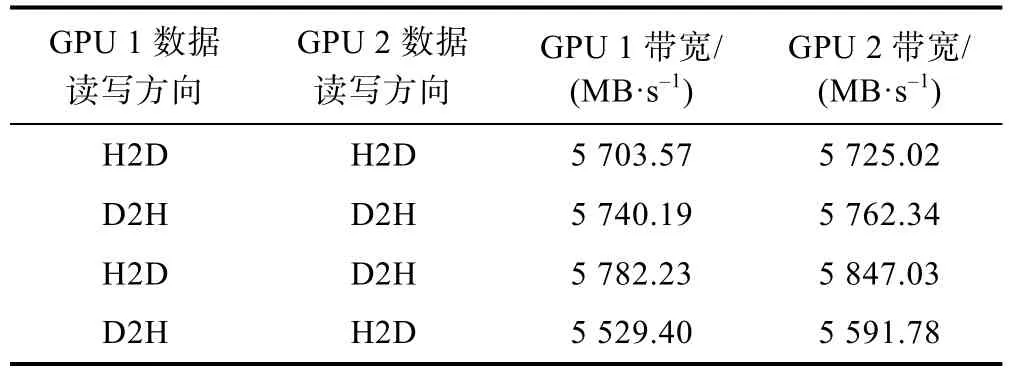
表1 GPU与内存之间读写带宽测试结果
4.2 GPU运算速率测试
为验证成像处理系统可满足空间目标 ISAR成像处理的实时性要求,表2给出了GPU在进行脉冲压缩处理时的实时性测试结果。
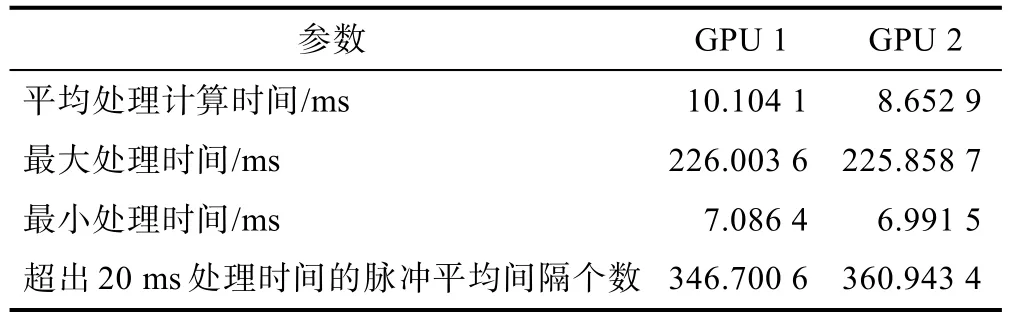
表2 GPU脉冲压缩实时性测试结果
测试中,雷达信号脉冲占空比为0.1,信号采样率为2.5 GHz,脉冲宽度为2 ms,信号重复周期为20 ms,连续测试时间为24 h。由测试结果可知,在20 ms的雷达信号重复周期下,每个脉冲的平均处理时间为10 ms左右,即所选GPU能够完成回波信号的实时处理需求。但是,可以看到结果中会出现较长单个脉冲处理时间的情况,可推测该现象由系统线程延时等原因导致[12]。根据测试结果中“超过20 ms处理时间的脉冲平均间隔个数”可知,该现象出现的频次较低,平均每处理350个脉冲左右才会出现单个脉冲的处理时间超过20 ms的情况。因此可通过在内存中缓存一定数量的回波信号解决该问题。
4.3 实验结果分析
该空间目标ISAR成像实验系统的成像处理结果可根据图5的监测点逐步验证。
监测点1的结果可由MATLAB读入的原始数据与显控软件读入的回波数据直接相减获得,当相减结果为0时表明读入数据正确。
由于目标轨道固定,监测点2的结果可根据轨道计算模块的结果与轨道理论值进行比较获得。如图 8所示,轨道误差一般小于0.01 m,此时,该误差量不影响后续的成像处理。
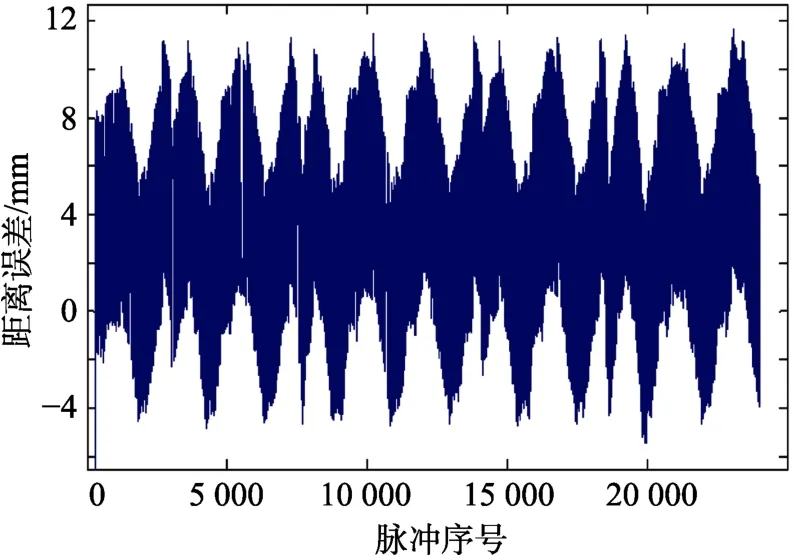
图8 轨道预报误差比较
监测点3所需补偿的相位φcmp可以直接根据监测点2的轨道预报结果由下式计算[2]:

其中,fc为回波信号载频;α为目标时刻时间伸缩因子;tr为回波快时间;τ为目标时延;μ为回波信号的调频斜率。
监测点4的结果可以直接根据显控界面的一维距离像显示来验证。如图9所示,当结果正确时,一维距离像各散射点之间的位置变化关系与成像结果散射点的相对变化一一对应。
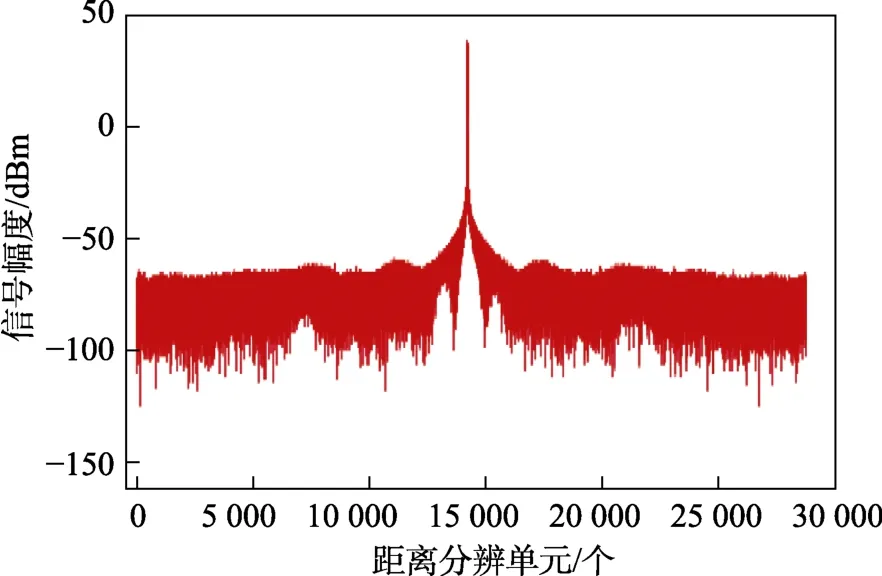
图9 一维距离像显示结果
监测点5的结果为一维距离像序列经包络对齐以及相位自聚焦后所得的两帧一维距离像剖面图,每帧900个脉冲,如图10所示。由处理结果可知,在相同的成像帧内,各散射点在同一个分辨单元内无走动。
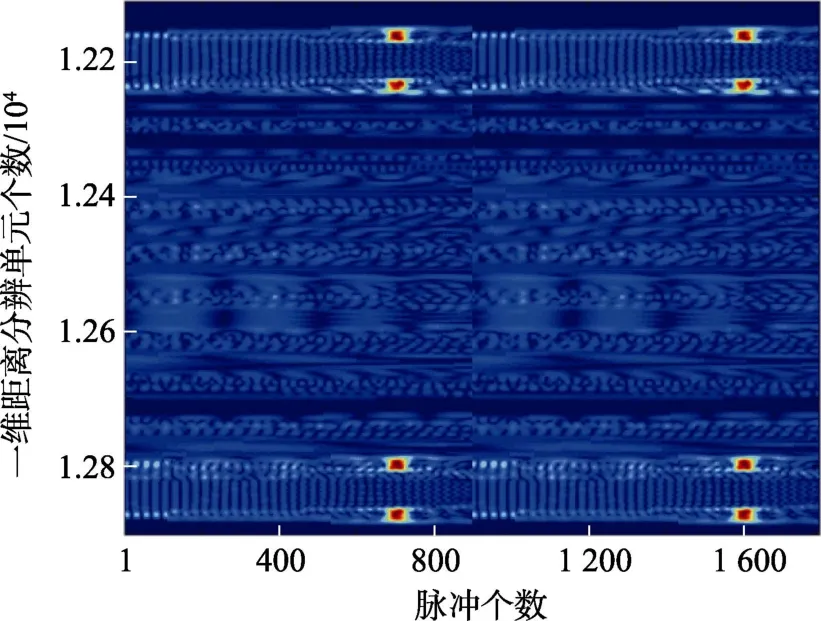
图10 包络对齐及相位自聚焦后一维距离像剖面
监测点6的结果为最终的空间目标成像结果。如图11所示,从成像结果可以明显看到所模拟空间目标的结构信息,且孤立散射点无散焦现象。
图11 空间目标二维成像结果
以上流程综合展示了空间目标ISAR实时成像处理的关键处理步骤,学生可通过该教学实验平台的功能模块编程和实际操作来掌握和熟悉空间目标宽带探测成像这一前沿技术,有利于提高对“高分辨探测与成像雷达系统设计”课程的深入理解。
5 结语
本文提出了一种空间目标实时ISAR成像处理实验系统设计方案,并根据该方案实现了系统的软硬件搭建。系统功能模块指标测试结果表明:数据存储模块可实现回波数据以及成像结果的实时读写,成像处理模块也可满足空间目标 ISAR成像处理的实时性要求。最后,给出了基于该系统的 ISAR成像处理实验各个步骤的实验结果,并进行了分析,验证了整个实验系统的可行性。
