基于模糊控制的汽车自适应巡航系统跟随工况的仿真
2020-09-24卢中德
卢中德
0 引言
模糊控制是根据丰富的经验知识和操纵经验总结出来的、经过归纳总结形成的用自然科学的语言所表述的一种控制策略[1]。通过电脑,可以把专家知识经验总结出来的模糊规则变成机器语言,从而实现对车辆的控制,并且使用模糊控制的理论进行控制器的设计时不需要清楚受控对象的精确数学模型[5]。
1 模糊控制器的设计
模糊控制系统主要有控制器FC,受控对象G 和反馈传感通道H 组成[2],如图1 所示。

图1 模糊控制系统结构
文章构建以速度差和距离差为输入,油门开度和制动力为输出的自适应巡航控制系统的模糊控制器。模糊控制规则是对专家经验总结而形成的语句。模糊规则库由IF-THEN 结构组成[3]。

其中Ai为距离偏差比例量E1的模糊子集,Bi为相对速度比例量E2的模糊子集,Ci为踏板量的比例量U 的模糊子集[4]。
模糊规则库的建立的原则是根据驾驶人驾驶习惯经验的总结及专家经验的总结来制定的[4]。文章中建立的两个输入量的隶属度函数模糊子集是五个,可以得到二十五条模糊控制规则,如表1 所示。
图2 为模糊规则输出曲面,可以看出文章设计的模糊控制器输出较为平滑连续,符合巡航系统的模糊控制器的使用要求。
图3 为自适应巡航系统仿真图,主要由自适应巡航控制器和车辆纵向动力学模型组成。输入信号是速度差和距离差,输出信号为车速,纵向动力学模型输出车速反馈给自适应巡航控制器形成闭环控制。
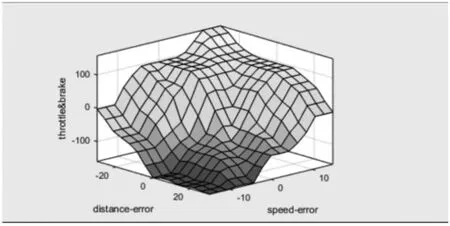
图2 模糊曲面观察窗口

表1 模糊控制规则表

图3 自适应巡航系统仿真图

图4 跟随行驶工况仿真曲线图
2 跟随行驶工况仿真
跟随行驶工况是指自适应巡航车辆前方同一车道上有车辆切入本车道,而且切入行驶车辆的车速大于自适应巡航车辆的行驶速度,当自适应巡航车辆检测到前方有车辆时,根据控制器计算两车的安全行驶距离及巡航车速,控制本车安全跟随前车行驶。初始距离用Sr 表示、安全行驶距离用Sa 表示,前车车速用表示Vp,巡航车速用表示Va。
仿真情景为:初始时刻t=0 s 时,Sa>Sr。这种行驶工况为巡航车辆速度小于本车道前方车辆的速度,初始时刻巡航车辆和前车之间实际距离小于安全距离。
仿真参数设定为:t=0 s 时,Vp=70 km/h,Va=60 km/h,Sr=26 m,Sa=27 m。仿真计算结果如图4 所示。
3 小结
对仿真结果进行分析可以看出,文章中设计的模糊控制器能对目标车速进行控制,车速从60 km/h 到70 km/h 的控制过程中,速度变化平稳,没有出现较大的超调量,控制效果较理想。在车距控制中,实际车距和理想车距没有出现较大偏差,控制的距离较理想。综述,本文设计的模糊控制器能够较精确的控制车辆在跟随行驶工况下的车速和车距。