无人机空对地通信中的联合轨迹优化和功率控制
2020-09-21万俊肖霖杨鼎成吴法辉汪昭
万俊 肖霖 杨鼎成 吴法辉 汪昭

摘 要: 研究部署无人机与固定地面终端(GT)通信,无人机需要完成特定的任务,即从地面终端收集预定数量的数据。文中研究了一种圆形轨迹的无人机信息采集系统,联合考虑系统的能耗和任务完成时间。由于地面终端的通信能量消耗与无人机的飞行推进能量消耗之间存在博弈关系,需要设计合适的基于能量考量和任务需求的飞行策略。通过联合二分法和循环迭代的方法,分别得到了系统的能量消耗最小和地面终端的能耗最小两种飞行方案。此外,对应的最佳飞行半径和最佳瞬时传输功率也一并给出。最后,给出了数值结果以验证所提方案的性能,仿真结果表明,当传输功率和飞行半径取得最佳值时,无人机与地面终端系统将实现最佳性能和最小完成时间,同时系统的总能耗和GT的传输功耗也最小。
关键词: 无人机通信; 圆形轨迹; 能耗最小化; 功率分配; 资源优化; 信息采集
中图分类号: TN915?34 文献标识码: A 文章编号: 1004?373X(2020)17?0006?05
Abstract: The UAV (unmanned aerial vehicle) communication with the fixed ground terminals (GTs) is researched. One of the missions of UAV is to collect a given amount of data from the ground terminals. A new circular trajectory information acquisition system jointly considering both the energy consumption of the system and completion time of a mission is researched for UAVs. However, a circular flight strategy based on proper energy trade?off needs to be designed first due to the contradiction between the communication energy consumption of GTs and the propulsion energy consumption of UAVs. Two schemes to minimize energy consumption of the system and transmission power consumption of GTs are obtained with the bisection method and loop iteration method. The optimal flight radius and the optimal instantaneous transmission power are also given in this paper. The numerical results are provided to verify the performance of the scheme proposed in this paper. Simulation results show that, when the transmission power and flight radius get the best value, the UAV and ground terminal system will achieve the best performance and minimum completion time, and the total energy consumption of the system and the transmission power consumption of GT are also the smallest.
Keywords: UAV communication; circular trajectory; energy consumption minimization; power allocation; resource optimization; information acquisition
0 引 言
近年來,随着电子科学以及材料科学的快速发展,无人机的制造成本不断下降,逐渐被应用在各行各业,例如,交通控制、货物运输、航拍、公共救援等,同时,基于无人机的无线通信也受到了广泛地关注[1]。一方面,研究无人机通信是实现无人机监管,打造低空数字化的内在需求;另一方面,与传统的陆地通信系统相比,无人机辅助通信系统具有灵活性高、易于部署、成本低等优点。因此,把无人机作为空中基站搭载平台,能够增加无线网络的容量,扩大系统的通信覆盖范围[2],实现低成本、按需部署的通信服务要求[3]。另外,在通信基础设施薄弱或受灾地区中,基于无人机辅助的通信系统能够快速建立通信链路,即无人机通信亦可在应急通信中发挥重要作用[2]。此外,无人机辅助无线通信提供了更多的设计维度,相较于传统地面通信,能够在保证通信质量的前提下,进一步提高系统的能效。目前较多研究聚焦于无人机通信系统的覆盖增强理论[4?8],例如,在数据采集和分配场景[9]、无人机中继场景[10]、广播信道[11?12]和多播信道等场景的覆盖增强研究。
更多地,受限于无人机的运载能力[13],无人机辅助通信系统中无人机能耗的优化设计已经成为研究的焦点。例如,在文献[14]中,为了实现可靠且节能的数据传输,在无人机无线传感器网络中,作者研究了无线传感器网络中地面传感器的唤醒调度机制和无人机轨迹的优化。通过确定无人机的最佳覆盖区域,可以大大降低传感器所需的传输功率,同时,可以根据用户的分布调度无人机,通过调整无人机的高度以获得最低的通信能耗[15]。
在文献[16]中,作者提出了一种无人机基站的优化布局算法,在无人机以最小发射功率进行覆盖的情况下,该算法最大化无人机所能服务的用户数量。考虑到无人机的机载能量是受到限制的,在无人机协作中继通信网络中,作者提出一种既能降低通信中断概率又能延长网络存活时间的轨迹优化[17]。在无人机通信中,无人机的能耗是通信系统能效优化的重要因素[18]。直观地来看,如果无人机尽可能地靠近地面终端以获得更好的地对空信道,则可以减少地面终端的上行发送目标数据所需的传输能量[14]。但是这种方案将导致无人机消耗更多的推进能量。因此,地面用户传输能量消耗微量的减少通常是以大幅增加无人机的推进能量消耗为代价。实际上,通信能耗通常远低于推进能耗。由于无人机的机载能量有限,无人机的推进能耗成为通信设计中主要考量的因素。因此,基于文献[18]中建立的固定翼无人机推进能耗的数学模型,本文考虑了地对空无线通信无人机的总飞行能耗和地面终端的总传输能耗之间的折中关系[19],并研究了对应的任务完成时间。此外,对于圆形飞行这种特殊案例,给出了无人机最佳飞行半径和地面用户最佳瞬时传输功率。
1 系统模型和问题公式
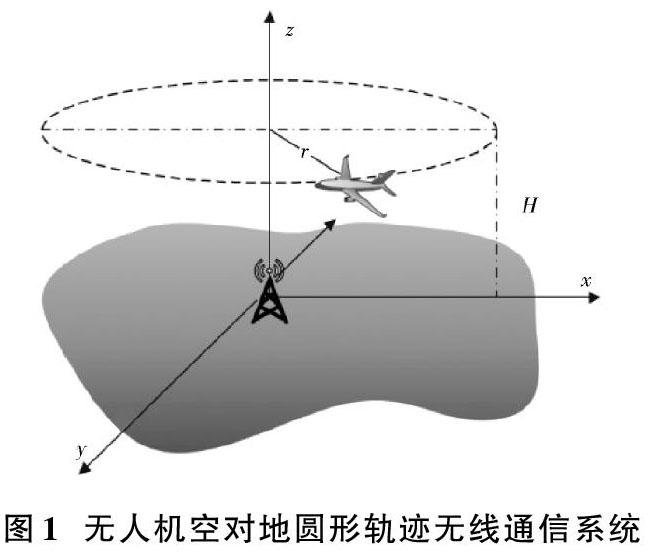
如图1所示,考虑一个地面终端与无人机的无线通信系统。无人机被部署到地面数据收集点附近采集信息。该采集点需上传的信息总量为[Q] bit且地面终端始终处于固定位置。考虑笛卡尔坐标系[(x,y,z)],其中[(0,0,0)]表示地面终端的位置,[H]表示无人机飞行高度,[T]为完成任务所需时间。假设无人机在固定高度[H]飞行,[H]可以理解为避免无人机因地形因素或者避让建筑物而导致频繁升降的最低飞行高度。假设无人机的飞行轨迹为一个规则圆,半径为[r],则地面终端与无人机之间的距离可以表示为[d=H2+r2]。假设地面终端与无人机之间的通信链路是视距通信,地面终端到无人机的信道增益可以表示为:
式中[β0]表示在参考距离[d0=]1 m的信道增益。设完成任务所需的时间为[T],为了方便,将[T]分成[N]个相等的区间,即[T=N?δn],其中,[δn]代表一个基本时隙的时长,它是一个足够小的值。地面终端在上传信息時,每个时隙都保持恒定的传输功率。地面终端能够提供的传输功率总量为:
注意到地面终端上传到无人机的信息比特是关于任务完成时间范围[T]的函数,地面终端的瞬时传输功率是恒定值,无人机的飞行半径为[r], 因此可以表示为:
式中:[B]是以赫兹为单位的通信带宽;[σ2]是无人机接收的噪声功率;[γ0=β0δ2],是参考信号与噪声在参考距离[d0=1]时的比值。与传统的地面通信系统不同,无人机的能耗主要由两部分组成:第一部分是无人机的推进能量消耗,无人机需要灵活移动并保持在高空;第二部分是通信相关的能量,包括辐射、信号处理等电路。注意,在实际中,通信相关的能量远小于推进能量,因此为了简单起见,本文忽略了通信相关的能耗。
根据文献[18]可知,固定翼无人机的推进能量消耗是轨迹半径[r]的函数,表示为:
式中[P2(r)]表示为无人机以恒定的速度绕圆飞行的推进功率,它是由圆形飞行轨迹的半径决定的。此外,[P2max(r)]表示无人机可以达到的最大推进功率,即[P2(r)≤P2max(r)]。定义系统的总能量消耗为[E],表示如下:
式中[λ1]和[λ2]表示权重因子并且是正数。因此,问题的数学描述如下:
式中:[Q]表示地面终端需要上传到无人机的信息总量。约束式(8)意味着无人机需要从地面终端采集固定数量的信息;约束式(9)意味着无人机可以提供的推进力是有限的;约束式(10)意味着地面终端的传输功率的总量是受限的。
2 可行性论证及最优解
2.1 给定传输功率优化飞行半径
在本节中,考虑([P1])的子问题即给定总允许传输功率[P1]和地面终端中最大能量约束的初始值,固定瞬时传输功率,通过最小化无人机能量消耗找到最佳飞行半径[r*]。正如文献[18]中推导出的固定翼无人机一样。半径为[rj],恒定速度为[V]的圆形轨迹,无人机所需的瞬时传输功率可以表达为:
式中:[c1,c2]是两个参数,这是由无人机重量、机翼面积、空气密度等决定的;[g]为重力加速度,标准值为[9.8 m/s2]。可以看出,对于无人机的圆形飞行轨迹,无人机的速度不影响通信吞吐量。对于任何绕圆的半径[r],最佳速度仅与半径[rj]有关,并且仅需要式(7)最小化并得到:
注意,这里的最小[E]只与[rj]相关,因此使用一维搜索来找出次优飞行半径[r*]。
2.2 [P1]在给定半径下优化传输功率
在这一节中,考虑([P1])的另一个子问题。即给出圆的半径飞行,然后优化功率分配问题[p1]。对于给定半径[rj],则GT到UAV的信道增益[h=β0(H2+r2)]是固定的,即[P2(rj)]也是固定的,所以[E2]是与[T]相关的函数, 那么[T]就可以被式(16)消除。在实际中,地面终端的总功耗是不会用尽的,忽略这一条件。从式(18)中可以看出,固定翼无人机飞行半径的情况下,分子是固定的,因此可以通过最大化分母来解决问题。此问题可以重新表述为:
2.3 采用二分法和迭代法对总传输进行优化
由上述可知,给出总传输功耗一个最大约束值,即[P1=E1maxδn]。但在实际应用中,地面终端的总传输功耗小于[P1]。因此,采用二分法来优化实际传输功耗[P1]。通过解决([P1.1])和([P1.2])问题,得到问题的次优解,即获得到次优半径和次优瞬时传输功率。这时满足给定信息数量的信息所需要的条件为:
直观地说,信息的总量与完成的任务所需的时间有关。将最优传输功率[P1]代入,并经过多次迭代,可以得到最优解。
因此,该算法可归纳为:首先,给定总传输功率和固定瞬时传输功率,通过最小化系统的总能量消耗找到次优飞行半径,然后替换飞行半径使用凸优化技术优化传输功率并获得次优的传输功率,通过二分法,得到最小的传输功耗。通过多次优化迭代,最终得到最佳飞行半径和最佳传输功率,同时,可以获得系统的最小能耗和完成任务所需的总时间。算法1中描述了详细的过程。
3 仿真结果
在本节中,提供仿真结果以验证本文提出的优化设计的性能。参数值设置如下:无人机的固定高度[H]=100 m, 通信带宽[B=]1 MHz,相应的噪声功率是[δ2=]-110 dB,此外,[c1=9.26×10-4,c2=2 250],[λ1=λ2=0.5],总传输功率总量为[E1max=500 J],无人机最大推进总功率[P2max=]1 500 W,无人机需要从GT下载的信息量为[Q]=600 Mb。
图2展示了采用二分法传输的总能量消耗与吞吐量的关系。可以看出,系统的总能量消耗随着GT中的吞吐量增加而增加。此外, 图2标记了通过使用二分法计算出的节点的总传输能耗,在[Q=]600 Mb时,地面节点的总能耗是[P1=167.97] W。
图3a)展示了地面节点不同传输功率时无人机的飞行半径与飞行总能量消耗的关系。在这种情况下,每个时隙的传输功率是恒定的,而总能量消耗随半径变化,对比了4种不同的传输功率。随着地面用户传输功率的增加,无人机总能量消耗减少。例如,通过将瞬时传输功率从0.15 W增加到0.45 W,系统的最小能耗将显著降低约50%。然而,考虑到无人机有最小总能量消耗限制,随着地面传输功率的增加,无人机的飞行半径也随之增加。采用迭代方法求解出无人机最小能量消耗对应的地面传输功率。此外,对于给定的固定传输功率,系统的总能耗首先随飞行半径的增加而减小,然后系统的总能耗达到最小能耗点,最后随着飞行半径的增加而增加。此外,标记了每种情况下最小总能耗点。图3b) 展示了不同传输功率下的飞行半径与任务完成时间的曲线图。直观地看,随着传输功率的增加,完成时间减少。但是,隨着飞行半径的增加,完成时间增加。因此,需要找到最佳飞行半径和传输功率以优化任务完成时间。如果飞行半径较小,可以减少地面节点在传输上行链路数据所需能量,但导致UAV消耗更多推进能量。然而,无人机的机载能量是有限的,需要适当设计以节省机载能量。此外,传输能量消耗的减少通常以无人机的较高推进能量消耗为代价。
图4显示了飞行半径与地面终端吞吐量的关系。通过多次迭代得到无人机的最优飞行半径。可以看出,当系统吞吐量为600 Mb时,最优传输功率为0.44 W,最优飞行半径为79.37 m。当传输功率和飞行半径取最佳值,GT?UAV系统将实现在保证系统总能耗的前提下,系统所需的实际时间最小。
直观地看,任务完成时间随着吞吐量总体增加。系统吞吐量完成预定任务信息量的时间为[Tmin=]279.21 s。当完成一定数量的任务时,飞行半径越大,任务完成时间越长。任务完成时间会随着无人机半径的增大而增加,同时,完成传输任务的时间也增长,无人机的能耗增大,地面传输功率消耗增大。
4 结 论
本文研究了空对地无人机无线通信系统,通过无人机采集地面终端数据。应用凸优化技术、迭代优化算法和二分法,通过最小化系统的飞行能量消耗获得最佳飞行半径和传输功率,同时,满足需要完成的信息总量和地面节点总传输能量约束的条件。当传输功率和飞行半径取得最佳值时,无人机与地面终端系统将实现最佳性能和最小完成时间,同时系统的总能耗和GT的传输功耗也最小。
参考文献
[1] ZENG Y, ZHANG R, LIM T J. Wireless communications with unmanned aerial vehicles: opportunities and challenges [J]. IEEE communications magazine, 2016, 54(5): 36?42.
[2] BUCAILLE I, H?THUIN S, MUNARI A, et al. Rapidly deployable network for tactical applications: aerial base station with opportunistic links for unattended and temporary events absolute example [C]// MILCOM 2013 IEEE Military Communications Conference. San Diego, CA: IEEE, 2013: 1116?1120.
[3] ZHAN P, YU K, SWINDLEHURST A L. Wireless relay communications with unmanned aerial vehicles: performance and optimization [J]. IEEE transactions on aerospace and electronic systems, 2011, 47(3): 2068?2085.
[4] AL?HOURANI A, KANDEEPAN S, LARDNER S. Optimal LAP altitude for maximum coverage [J]. IEEE wireless communications letters, 2014, 3(6): 569?572.
[5] BOR?YALINIZ R I, EL?KEYI AMR, YANIKOMEROGLU H. Efficient 3?D placement of an aerial base station in next generation cellular networks [C]// 2016 IEEE International Conference on Communications. Kuala Lumpur, Malaysia: IEEE, 2016: 1?5.
[6] MOZAFFARI M, SAAD W, BENNIS M, et al. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage [J]. IEEE communications letters, 2016, 20(8): 1647?1650.
[7] AZARI M M, ROSAS F, CHEN K C, et al. Optimal UAV positioning for terrestrial?aerial communication in presence of fading [C]// 2016 IEEE Global Communications Conference (GLOBECOM). Washington DC, USA: IEEE, 2016: 1?7.
[8] L? Jiangbin, ZENG Yong, ZHANG Rui, et al. Placement optimization of UAV?mounted mobile base stations [J]. IEEE communications letters, 2016, 21(3): 604?607.
[9] PEARRE B, BROWN T X. Model?free trajectory optimization for wireless data ferries among multiple sources [C]// 2010 IEEE Globecom Workshops. Miami, FL, USA: IEEE, 2010: 1793?1798.
[10] ZENG Yong, ZHANG Rui, LIM T J. Throughput maximization for UAV?enabled mobile relaying systems [J]. IEEE tran?sactions on communications, 2016, 64(12): 4983?4996.
[11] WU Qingqing, ZENG Yong, ZHANG Rui. Joint trajectory and communication design for UAV?enabled multiple access [C]// GLOBECOM 2017—2017 IEEE Global Communications Conference. Singapore: IEEE, 2017: 1?6.
[12] WU Qingqing, ZENG Yong, ZHANG Rui. Joint trajectory and communication design for multi?UAV enabled wireless networks [J]. IEEE transactions on wireless communications, 2018, 17(3): 2109?2121.
[13] 郭杰,王晓银,滑亚慧.无人机航迹规划与监控系统设计[J].计算机测量与控制,2018,26(9):72?77.
[14] ZHAN Cheng, ZENG Yong, ZHANG Rui. Energy?efficient data collection in UAV enabled wireless sensor network [J]. IEEE wireless communications letters, 2017, 7(3): 328?331.
[15] ALZENAD M, EL?KEYI A, LAGUM F, et al. 3?D placement of an unmanned aerial vehicle base station (UAV?BS) for energy?efficient maximal coverage [J]. IEEE wireless communications letters, 2017, 6(4): 434?437.
[16] LI Kai, NI Wei, WANG Xin, et al. Energy?efficient cooperative relaying for unmanned aerial vehicles [J]. IEEE transactions on mobile computing, 2015, 15(6): 1377?1386.
[17] ZENG Yong, ZHANG Rui. Energy?efficient UAV communication with trajectory optimization [J]. IEEE transactions on wireless communications, 2017, 16(6): 3747?3760.
[18] JEONG S, SIMEONE O, KANG J. Mobile edge computing via a UAV?mounted cloudlet: optimization of bit allocation and path planning [J]. IEEE transactions on vehicular technology, 2017, 67(3): 2049?2063.
[19] 岳秀,张伟.基于智能算法的无人机航迹规划[J].电子杂志,2019,32(2):9?13.
