基于无人机光伏巡检的视频图像传输系统设计
2020-09-16曹阳孟茁
曹阳 孟茁
摘要:随着无人机技术的发展,无人机在各个领域得到了广泛的应用,其中无人机光伏巡检系统就是无人机的重要应用。视频图像数据传输功能是无人机光伏巡检系统的重要功能之一,设计了一套视频图像传输系统,主要包括视频图像采集、视频图像的编解码、基带信号处理和无线信道的收发。通过无人机上的摄像头进行视频图像的采集,视频编码芯片进行编码,利用基带信号处理技术将编码通过无线信道发送到地面接收端,在接收端利用解码芯片进行解码并显示视频图像。
关键词:无人机;视频图像传输;OFDM
中图分类号:TN919文献标志码:A文章编号:1008-1739(2020)15-62-4
0引言
近年来,随着无人机技术的高速发展,人们对于无人机产品的关注视线也有所改变,由以往的只关注无人机的控制与操作转变到更加关注无人机的视频图像传输性能。随着集成电路技术、计算机技术和无线通信技术的高速发展,视频图像传输技术也得到了井喷式的发展,同时对于视频图像传输技术的需求和应用也更加广泛。传统的视频图像传输技术有2种:一种是利用模拟数据进行视频图像的传输,缺点是传输距离有限、传输质量受环境影响及使用起来不方便;另一种是借助于计算机的视频图像处理系统,将视频图像信号进行压缩处理后通过互联网发送给异地计算机,缺点是体积庞大。为解决上述问题,设计了一款无人机光伏巡检系统,设计主要包括硬件设计和软件设计,硬件设计实现了視频图像数据的采集与编解码,软件设计实现了误码率低的数据传输技术和简单的操作系统,使系统达到清晰度高、传输距离远、方便易携的要求。
1系统总体设计
基于无人机光伏巡检的视频图像数据传输系统分为2个部分:无人机上的视频图像发送端和地面上的接收端。该系统的工作流程如下:将摄像头放置到无人机上,利用无线通信信道实时将摄像头拍摄的高清视频图像发送到地面上的接收端,并利用地面上的视频显示设备将视频播放出来。由于不同类型无人机的承重能力和续航能力不同,要求系统具备体积小、功率低及传输距离远等特点。针对上述特点,系统的设计方案如下:将无人机上摄像头拍摄的视频图像通过视频图像编码模块进行编码,然后将编码码元经过数据通信接口传送到地面上的视频图像解码模块进行解码,最后将解码后的视频图像输出到对应的数据接口。
1.1系统框架
由于现有通信系统的性能有限,无法直接传输大量高清视频数据,所以需要对视频数据进行编解码工作,在发送之前进行数据的编码压缩,在收到数据后进行解码工作。视频数据进行编解码通过软件和硬件2种方法来实现,硬件方式进行编解码工作主要是为了保证系统的可靠性、实时性和灵活性,所以系统是由一个负责编解码的视频处理芯片完成,该芯片具有高带宽和容量大的特点。存储芯片的选择主要是由于视频数据量较大,要对视频处理芯片进行存储扩容,实现对视频图像数据的缓存,最后通过无线信道将视频图像数据发送出去。
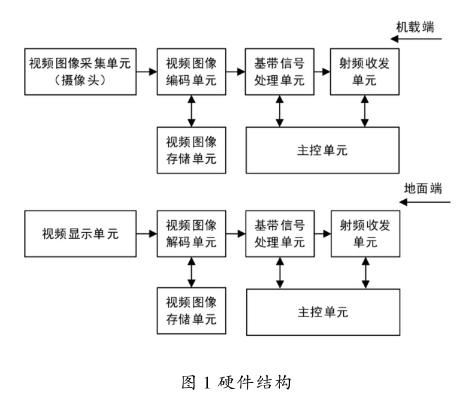
1.2硬件结构
系统要实现从原始视频采集传送到地面接收端,首先采集视频图像信号进行A/D转换,并对视频图像数据进行编码,最后通过无线信道进行数据传输。系统硬件设计大概可以分为视频图像采集单元(依托摄像头进行视频图像数据的采集)、视频图像编码单元(负责视频图像数据的处理)、存储单元(负责视频图像数据的存储)、基带信号处理单元、射频收发单元、主控单元及视频显示单元。硬件结构如图1所示。
1.3软件结构
系统软件架构可分为位于空中的编码单元和位于地面的解码单元2个部分。为了降低系统延时,采用硬件进行编码;减少误码率采用OFDM进行调制[1];操作系统选用Linux,同时也可以降低开发难度[2]。整体架构由环境平台和应用平台搭建组成,主要目的是实现对各个单元的驱动和基带信号处理。
2系统硬件设计
2.1硬件整体架构
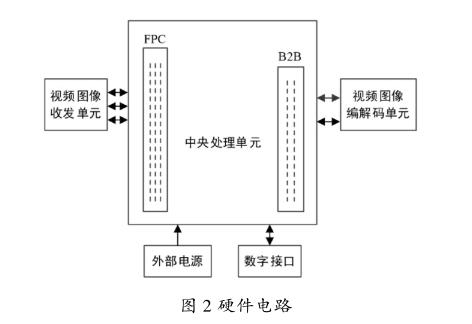
硬件架构主要由视频图像收发单元、视频图像编解码单元、中央处理单元、数字接口和供电单元5个部分组成,硬件电路如图2所示。从图中可以看出,视频图像收发单元通过柔性电路板与中央处理单元相连,视频图像编解码单元通过板对板接口与中央处理单元相连,供电单元通过板卡上的电源接口供电,供电电压为12 V和5 V,数字接口放在中央处理单元上,数字接口包含网络接口、RS422接口和RS232接口。
中央处理单元电路主要包括以下几个部分:
①中央处理电路:系统综合考虑各方面因素,选用ZYNQ-7035平台,FPGA部分实现数字接口的设计与基带信号处理,ARM部分实现控制与管理。数字接口部分增加了电平转换芯片,以实现TTL电平与接口1.8 V电平的转换[3]。
②时钟电路:系统的工作时钟有33.333 333 MHz,125 MHz,25 MHz,27 MHz几种,利用时钟选通器同时提供多个时钟信号。
③电源电路:系统需要供电的电压有1.2 V,1.8 V,1.0 V,2.0 V,2.5 V,3.3 V,FPGA和ARM分开供电,选用的电源芯片主要有LDl085C,LM339,LTM4644,TPS74401,LTM4616,MAXl510等。
④存储电路:系统配置2片4 GB的DDR3 SDRAM芯片,布线时要求等长对称,按照树状结构进行布线。还配置3片QSPI Flash存储器,1片参数存储器EEPROM。
⑤复位电路:系统的复位电路使用1路MAX708SESA芯片。
2.2视频图像编解码单元电路
视频图像编解码单元用于实现无人机视频图像的传输,实现发射端视频图像的编码和接收端数字码元的解码。系统的视频图像编解码采用了Analog Devices Inc公司的实时JPEG2000硬件编解码芯片ADV212,芯片专门应用于视频图像的压缩,压缩可以提升视频图像的画质特性,并且可实现计算密集型功能,具有配备兼容性强、低延迟的特点[4]。系统设计视频图像支持复合同步视频广播信号和PAL制式,所以系统中需要ADC和DAC转换芯片,选用的ADC为ADV7181D,DAC为ADV7341,这2款芯片质量好、支持多种视频格式的解码[5]。
2.3外部电源单元
外部电源电路包括5 V,12 V的电源转换模块,将输入电源通过DC-DC转换为5 V,12 V,为整个系统提供外部电源。
2.4数据接口单元
数字接口电路包括网络接口、RS232接口与RS422接口。网络接口采用RJ45变压器、千兆以太网MAC接口和PHY Realtek RTL821 1FI实现;RS422接口采用芯片SV65HVD09實现;RS232采用芯片SN65C3232E实现。
3系统软件设计
3.1软件整体架构
系统软件由主控单元、视频处理单元、基带信号处理单元和无线信道组成,整体架构如图3所示。
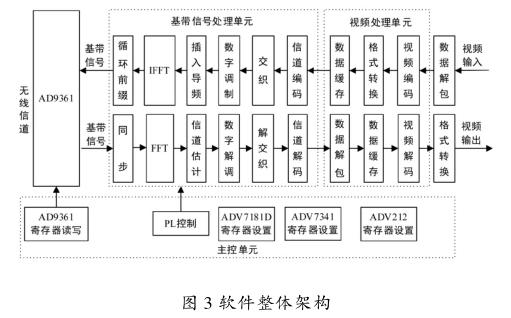
对于发射端而言,将采集到的视频图像数据送给视频处理芯片进行解包,再按要求进行编码[6]。生成码流后,送入基带信号处理单元进行基带调制(采用OFDM的方法,包括编码、数字调制及IFFT等),然后发送到射频电路[7]。最后发送到接收端,接收端接收到数据后按发送端逆过程进行处理(包括FFT、信道估计和解调),然后送至解码单元进行格式转换,将最终结果显示给客户[8]。
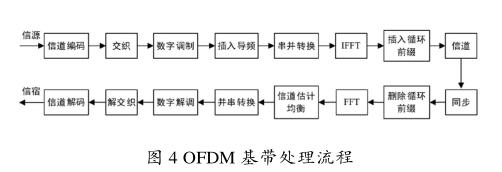
3.2基带信号处理
基带信号处理单元采用OFDM的方法进行处理,流程如图4所示。
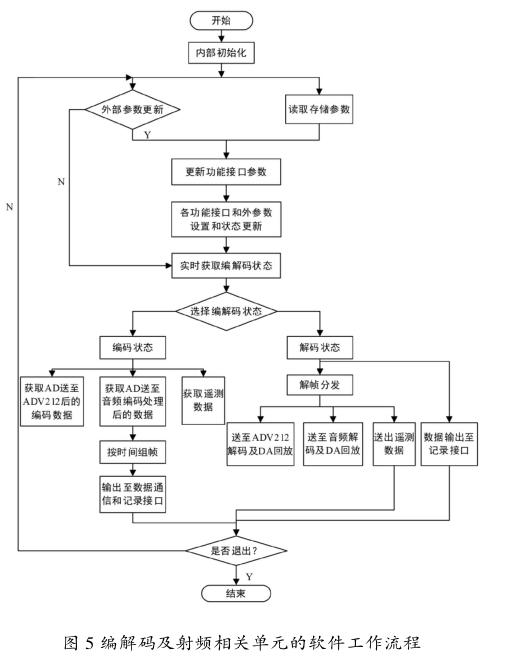
编解码及射频相关单元的软件工作流程如图5所示。
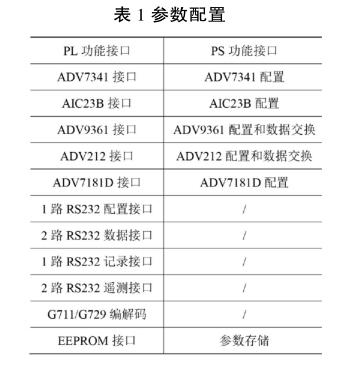
参数配置如表1所示。
4结束语
基于无人机的光伏巡检中的视频图像传输系统,经过现场测试,各个指标满足要求。该系统具有体积小、重量轻、延时低、系统稳定、传输距离远、开发周期短及系统成本低等优点。但又存在遮挡物下传输质量受很大影响的问题,需在以后的实践中进行提升和改进。随着电子科学技术的发展,特别是计算机人工智能、大数据等相关技术的日新月异,高清晰、快速率的图像传输设备也在向着小型化、轻量化和智能化的方向发展。
参考文献
[1]郝蒙.OFDM无线视频通信系统的设计及实现[D].北京:北京邮电大学,2013.
[2]李长才.基于嵌入式Linux视频图像采集及其无线传输的研究[D].苏州:苏州科技大学,2017.
[3]明章辉.基于FPGA的Camera Link视频信号处理技术的研究[D].南京:南京理工大学,2014.
[4]陈鑫. JPEG2000标准研究及其与JPEG标准比较[J].信息技术,2015(4):137-140,144.
[5]刘方亮.基于SOC与AD9361的软件无线电射频收发机[D].上海:东华大学,2015.
[6]张亚男.无人机高清视频无线传输关键技术研究与验证[D].成都:电子科技大学,2017.
[7]徐超.视频图像无线传输技术研究[D].太原:中北大学,2011.
[8]金文杰.MIMO-OFDM信道估计和均衡算法及VLSI实现研究[D].上海:华东师范大学,2017.
